一种车载移动式安检安防系统结构设计
2021-09-10 04:40韦巍卢明刘杭
内燃机与配件 2021年5期
韦巍 卢明 刘杭


摘要:本文针对车载移动式安检安防系统的设计要求,集成多种安检手段,实现对被检人员的全方位安检,并充分借鉴民用房车的设计思路,对整个安检舱进行合理布局,满足被安检人员在一条合理的动线上进行安检,最大限度提高安检效率。本文详细阐述了系统总体设计、扩展机构详细设计以及调平撑腿详细设计等三方面设计内容,并采用力学分析手段,对安检舱骨架进行了强度与变形量的校核。系统实际工程研制完成后,性能稳定可靠,指标满足总体要求。
关键词:车载移动式;安检安防;扩展机构;调平系统
中图分类号:TP302 文献标识码:A 文章编号:1674-957X(2021)05-0196-02
0 引言
太赫兹技术作为近年来兴起的新兴技术,逐步使用于安检领域[1]。被动式太赫兹成像技术[2],是利用捕捉人体自身发射的太赫兹波,进行处理分析并成像的技术,该技术由于是捕捉人体自身所发射的太赫兹波,故设备本身不产生任何辐射,该技术不仅可检测金属物质,还可检测陶瓷、粉末、液体等各类非金属物质。
本文所描述车载移动式安检安防系统,是基于太赫兹人体安检技术,并结合X光机、人证比对、视频监控以及人脸识别等安检安防技术,形成一套高集成度、多功能的安检安防系统,该系统可快速部署与撤收,可灵活运用于各类大型活动的临时安检保障工作。
1 结构总体设计
本系统在总体布局方案中,统筹考虑各类限制性标准文件所规定的边界条件(运输要求、外形包络、重量等),并结合实际使用需求,进行了自上而下的系统设计。整个系统考虑了成本、使用方式、维修性以及现场布置难易程度后,选择了牵引车拖拽拖挂车的整体结构形式,拖挂车采用中置轴布局,整个拖挂车重量需控制在3500kg以下,拖挂车便可使用撞刹作为制动结构,以简化拖挂车结构设计。系统运输状态如图1所示。
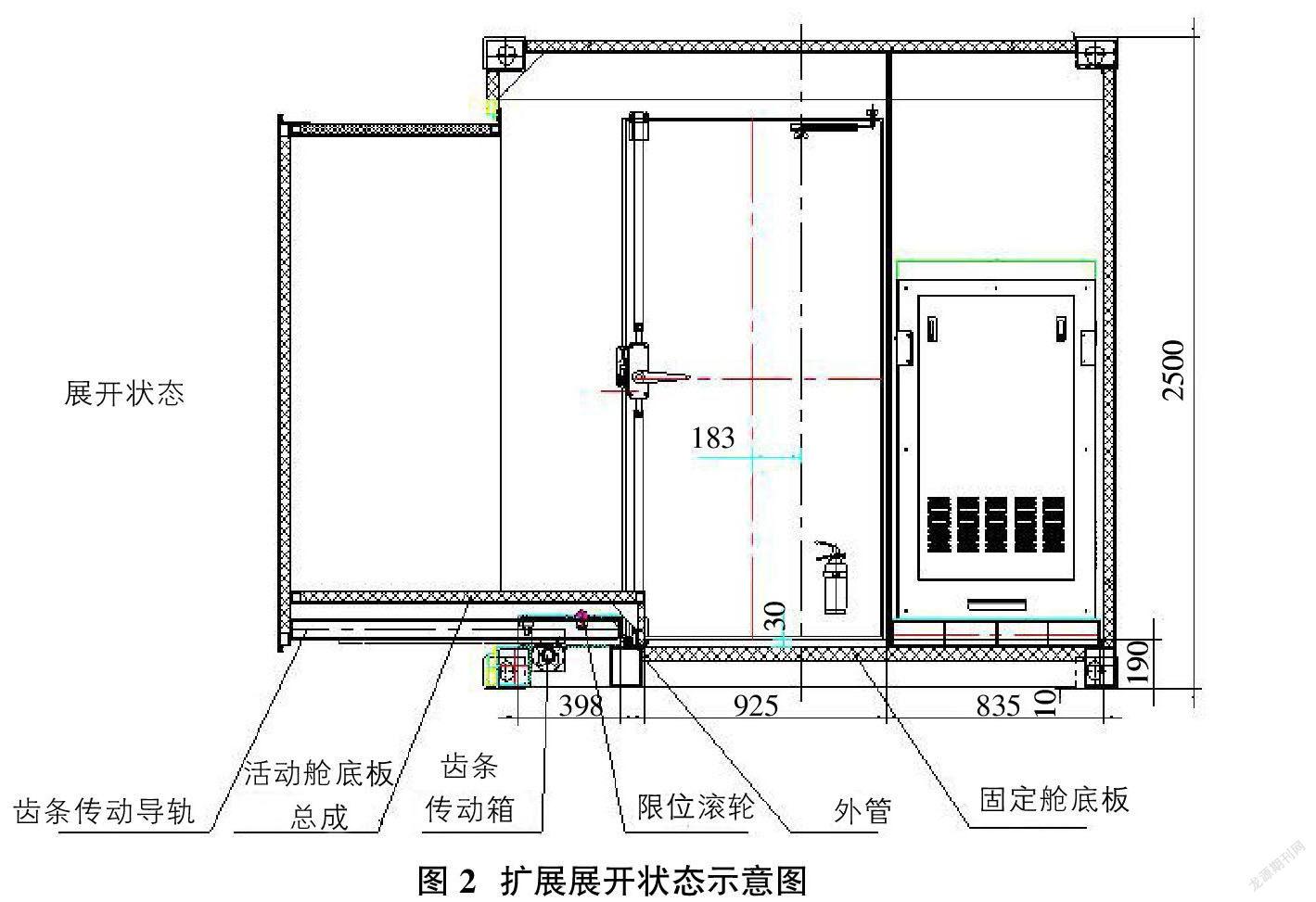
车载移动式安检安防系统根据功能划分为运输车与拖挂车两部分,其中,拖挂车系统又分为安检舱与运输平台两部分,安检舱为整个系统核心组成部分。安检舱四周通过角件安装电动调平撑腿,实现安检舱的自动装卸与调平,安检舱卸下过程如图2所示。待拖挂车移动至指定地点后,给安检舱通电,使用调平撑腿将安检舱撑起后,将拖挂车架抽出,最后将电动撑腿收拢,完成一次卸舱,装舱过程与上述过程相反。
2 关键技术
2.1 扩展机构详细设计
本系统设计要求安检舱采用单侧扩展形式,以增加舱内使用面积,扩展舱单侧潮外扩展距离为800mm,扩展舱负载为600kg,扩展舱扩展后,扩展舱与主舱重叠部分为400mm,该结构为悬臂受力结构,扩展舱扩展后展开状态如图2所示。
本系统扩展机构设计考虑负载、稳定性、环境适应性后,选择齿轮齿条传动方式,配合导轨与行程开关实现扩展动作。
对扩展机构电机选型计算如下:扩展系统承载质量取M=1500kg,初定平移平均速度V=3.6m/min,加速时间t1为1s,选用模数M=3、齿数Z=20的齿轮配合相应的齿条作为平移驱动,齿轮传动效率比η=0.98。防护罩整体依靠两侧平行导轨承重,预估摩擦系数取μ=0.01。
滑轨摩擦力F=M×g×μ=1500×10×0.01=1500N
加速力Fa=M×a=1500×0.06=90N(a=V/t1)
合力Fh=1500+90=1590N
齿轮分度圆直径D=M×Z=60mm
启动力矩T=Fh×D/2=1590×0.03=47.7N·m
齿轮转速n1=V/π D=3.6/0.06π=19.12r/min取n1=20r/min
现根据伺服电机额定转速n2=2000r/min
得出减速比i=n2/n1=100 取i=100(利于产品选型)
减速机输入端(伺服电机)加速转矩
Td=T/ i·η=47.7 /(100×0.98)=0. 487N·m
伺服电机功率PG=Td×n2 / 9550=0.1kW。考虑实际装配间隙等问题,选用200W伺服电机。
随后对扩展系统直线导轨承载进行校核:扩展舱及X光机设计质量为910kg,扩展系统设计承载质量为1500kg。
扩展舱伸出后力矩为:
M扩=1500×9.8×0.36N·m=5292N·m
单套直线导轨组承载力矩为M=2646N·m,单套直线导轨设置3个滑块。本次选用直线导轨单个滑块负载力为MA=2680N·m>2646N·m,负载能力满足要求。
2.2 电动撑腿设计
本系統除去底盘外、舱体总重为2.8t,使用4个调平撑腿,实现舱体升降与调平功能,因此舱体升降行程较大,为防止升降过程出现由于撑腿不同步,导致的安检舱侧倾甚至侧翻风险,在安检舱底部安装水平传感器,实时对信号进行反馈,使得撑腿可自动进行姿态调整,保证安检舱顺利进行升降。
调平撑腿考虑运输时道路运输限款2.5m,故设计为回转式,运输状态时,调平撑腿回收至安检舱宽度范围内,使用状态时,旋转展开至安检舱宽度范围外,并设计锁紧机构,使得无论出于运输状态还是使用状态,调平撑腿均可保持稳固。单调平支腿用于支撑和调整安检舱高度,具备到位限位、自锁等功能。单个电动调平腿主要由伺服电机、减速器、传动齿轮组、T型丝杆、套筒、传感器等组成,结构可保证机械自锁,内部结构如图3所示。
3 安检舱骨架力学分析
由于拖挂车总重量不得超过3500kg,故控制舱体骨架重量为保证设计要求最为行之有效方式,这样即对安检舱的材料使用、强度等指标提出了很高的要求。本系统安检舱厢体大板采用加筋复合大板制作技术,为保证舱体调平升举及吊装强度,底壁板骨架采用钢制封闭框架结构,选用4mm厚宝钢750钢板材料,为减轻车厢重量,顶部及侧部壁板采用40mm×50mm铝合金矩形管为主骨架材料。所有壁板骨架均采用大跨度斜拉结构,减少短横梁数量,并在底壁板骨架纵梁立面加工减重孔。
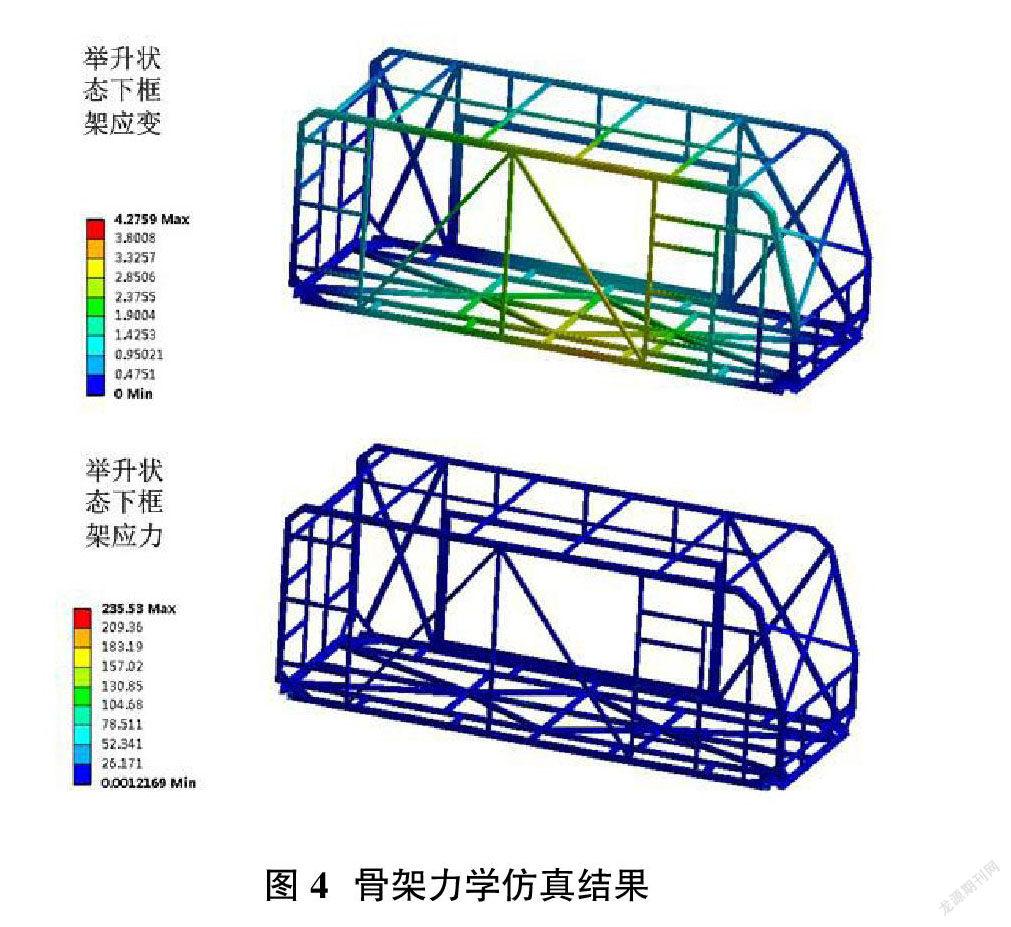
四点调平举升为最恶劣工况,按此工况对底骨架模型做受力分析,进行仿真计算,结果如图4所示。从仿真结果来看,骨架受力处由于使用了高强钢板,使得加载后,整体骨架变形为4.2mm,满足设计要求,最大应力为235MPa,在底骨架处,远小于宝钢750钢板材料屈服应力值。除底骨架外,其余部分使用铝合金,使得整个骨架重量控制在900kg,从而满足总体指标要求。
4 结语
结合车载移动式安检安防系统的研制,本文从结构总体设计、扩展机构设计、电动撑腿设计以及安检舱骨架设计等重要方面进行了阐述,并对各传动机构的详细设计,以及骨架的力学性能做了详细的设计分析,实现了系统功能与结构设计指标。系统整机实际工程研制完成后,状态稳定,性能可靠,综合指标与功能性均能较好满足设计要求,对类似移动式安检安防系统研制工作具有一定的参考意义。
参考文献:
[1]武帅.太赫兹技术应用进展[J].电子技术应用,2019(7):3-7,18.
[2]范殿梁.车载移动式太赫兹综合安检系统的设计与应用[J].中国安全防范技术与应用,2018(6):9-11.
[3]高炳西,冯辉.太赫兹人体安检关键技术及应用[J].警察技术,2016(03):23-26.