
基于神经网络PID的永磁同步电机调速系统
2021-09-10 15:45宦昱吴德军
机电工程技术 2021年2期
宦昱 吴德军
关键词:神经网络;PID;空问矢量控制;永磁同步电机
0引言
永磁同步电机具有效率高、转矩高、响应快、结构简单的特点,非常适合运用在测量雷達等控制精度要求较高的场合,但是其模型具有多变量、强耦合、非线性,并且在运行中参数会发生变化的特点,若使用常规的线性控制理论进行控制,往往无法得到最佳控制效果。
PID控制器拥有结构简单、运算量小、易于调节的优点,适合整合到雷达伺服系统的嵌入式控制器中使用。永磁同步电机在运行中由于负载、温度等发生变化,其模型参数往往发生变化,此时如果使用控制参数不变的PID控制器,往往达不到最优控制效果。
在非线性和不确定性系统的控制中常引入神经网络控制方法,针对永磁同步电机的特点,采用神经网络将有利于提高系统的控制性能。目前在这方面已经有了一定的研究成果。利用神经网络的自学习和自整定能力解决PID控制器参数优化问题,将显著提高PID控制器在永磁同步电机控制中的能力,目前国内外学者在这方面已经做了大量的工作。
本文将采用PID神经网络(PIDNN)控制器代替永磁同步电机空问矢量控制算法中速度PID控制器,达到改善控制效果的目的。研究中采用仿真加实验的验证方法,首先搭建仿真模型验证算法的可行性,并根据仿真结果完成PIDNN连接权值选取,借助电机实验平台进一步验证了算法的可行性。
1永磁同步电机数学模型和空间矢量控制方法
本文神经网络PID控制器的研究是基于空问矢量控制方法进行的,首先将介绍永磁同步电机模型和空间矢量控制方法。
对于永磁同步电机控制模型,一般首先将三相静止坐标系(UVW坐标系)转化为两项旋转坐标系(坐标系),由此分离出励磁分量和转矩分量从而实现对电机控制的解耦。
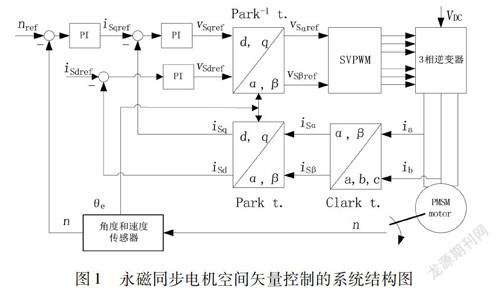
由此得出q轴电流与电机输出转速有对应关系,控制q轴电流即可控制电机转速。永磁同步电机空问矢量控制就是通过控制q轴电流实现对电机速度控制的方法,系统结构如图1所示。本文旨在研究使用神经网络PID控制器代替原有速度环PI控制器并改善控制效果。
2PID神经网络结构与算法
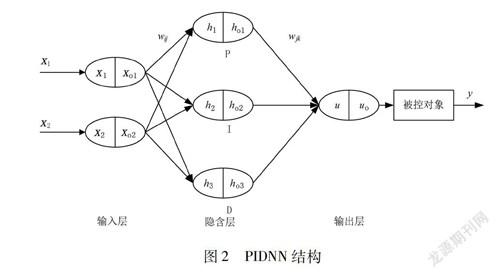
一个典型的PID神经网络结构如图2所示,从左到右依次是输入层、隐含层、输出层。PID神经网络结输入信号与普通PID控制器一样包括给定值和反馈值。输入信号经过神经元之间相关计算得到最终的控制量,最终的控制效果又反过来作用于权值修正,最终达到改善控制效果的目的。
2.1工作信号正向传播
对于神经网络PID控制器,其计算迭代过程由式(6)~(12)表示。其中xi为系统输入量和反馈量,wii和w是每层之间的连接权值,最终的输出结果经过限幅得到最终的控制量。
对于输出层,其输入为上一层神经元与其对应的连接权值乘积之和:
2.2误差信号反向传播
由神经网络PID控制器正向传播计算方法得知,连接权值是控制效果的决定因素,控制器就是通过不断改进神经网络连接权值,达到改善控制效果的目的。一般选取一组随机数作为神经元连接权值的初值,将期望值与实际输出的偏差作为控制效果判定标准,根据控制效果从输出层向输入层按照误差信号反向传播(back-propagation,BP)迭代计算连接权值。在实际操作中,使用误差均方值来判定当前控制效果。
2.3对于算法的改进
最速下降法常遇到收敛速度慢和收敛震荡问题,可以使用以下改进方法。
(1)引入动量项
动量项可以表示为:
3仿真实验
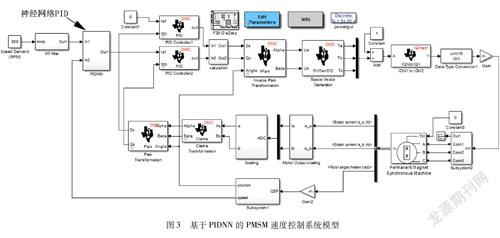
Embedded Coder中包含了MathWorks公司与11公司合作开发的工具包,并提供了TI DSP底层硬件驱动支持,可以帮助自动生C/C++代码和CCS工程。本研究基于此工具箱搭建空间矢量模型,并整合速度环神经网络PID控制器,得到基于神经网络PID控制器的永磁同步电机速度控制模型,如图3所示。
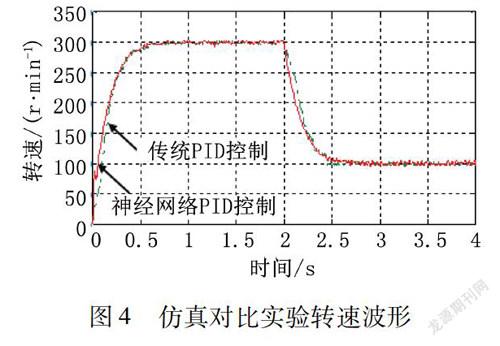
试验中速度给定为阶跃输入,仿真开始时速度300r/min,2s后速度100r/min。为验证神经网络PID控制效果,设计了一组普通PID控制的对比试验,神经网络PID控制器权值初始值为普通PID控制参数。得到试验结果如图4所示。
通过试验对比可以看出:(1)2种控制器最终都能跟踪速度给定,并且运行稳定;(2)采用神经网络PID控制器的控制模型由于能够实时优化网络连接权值,无论是在加速还是在减速运动中都能更好地跟踪速度给定。
4实验结果与分析
借助自动代码生成工具将以上控制器模型生成代码,并将代码下载到电机控制器中运行。试验中参考仿真过程,设计了神经网络PID控制和传统PID控制的对照实验。
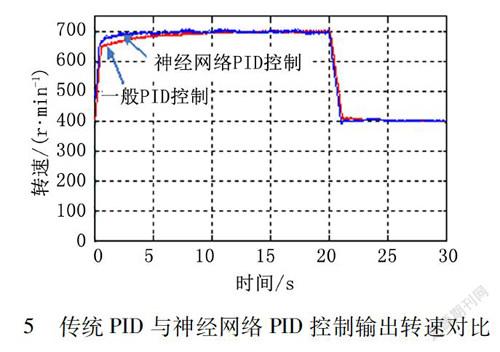
试验开始时速度给定为700r/min,20s后速度给定为400r/min,得到两种控制器下电机输出结果如图5所示。
通过对比试验可以看出,将神经网络PID控制器运用于永磁同步电机控制具有可行性,相对于传统PID控制器,神经网络PID控制器能够使系统具有更快的响应能力,并且有助于改善永磁同步电机速度控制性能,同时还实现了一定意义上的控制参数自整定,节省了调试时间,同时增强了系统在不同负载下的冗余性。
5结束语
本文针对永磁同步电机多变量、强耦合、非线性的特点,设计了一款基于神经网络PID的改进型空问矢量控制器。仿真和实验结果表明,新的控制方法能够使永磁同步电机具有更好的适应性和更快的速度响应能力。
猜你喜欢
中国教育信息化·高教职教(2022年4期)2022-05-13
计算技术与自动化(2022年1期)2022-04-15
华东师范大学学报(自然科学版)(2019年5期)2019-11-11
软件(2017年6期)2017-09-23
汽车工程学报(2016年5期)2017-01-16
计算技术与自动化(2016年4期)2017-01-11
科技视界(2016年12期)2016-05-25
