履带车辆滑转滑移场测试方案研究
2021-09-10 18:37欧阳长永葛新章张帅梁祎晨周泽林
内燃机与配件 2021年11期
欧阳长永 葛新章 张帅 梁祎晨 周泽林
摘要:履带车辆在较为松软土地上行驶时,会出现低速侧滑移,高速侧滑转,导致履带块与地面之间的实际速度和轨道的卷绕速度不一样。滑移率和滑移率是量化滑移量的指标,但目前还没有滑移率的在线监测方法。
Abstract: When the tracked vehicle runs on the relatively soft land, it will have low speed sideslip and high speed sideslip, which will lead to the difference between the actual speed of the tracked block and the ground and the winding speed of the track. Slip rate and slip rate are indicators to quantify slip amount, but there is no online monitoring method for slip rate at present.
关键词:履带车辆;滑转;滑移
Key words: track-laying vehicle;trackslip;slippage
中图分类号:TJ81 文献标识码:A 文章编号:1674-957X(2021)11-0077-03
0 引言
军用履带车辆设计的最终目的,就是要对车辆的总体性能和各分系统性能进行系统分析、建模和优化,获取最优的综合性能:一方面,要以作战效能为目标,对火力及火力机动性能、机动性能、防护性能、电子信息性能及使用维修性能等进行系统论证和优化;另一方面,在保证各性能的同时,尽量减小车辆和各分系统的体积、质量和成本。
1 滑转滑移场特征分析
1.1 动力装置要求
由于军用履带车辆的特殊性,在测试过程中对动力装置也提出了如下要求:①在适应外界条件方面,应满足环境温度、相对湿度、环境空气含尘量、天气条件等的要求。②一般要求,包括体积小重量轻、对维护保养的部件有良好的接近性、维护和更换部件简便。③动力装置应具有良好的燃油经济性和机油经济性,动力装置还应有使用多种燃油的可能性。④动力装置的可靠性、技术保养的周期性和持续期应符合军用履带车辆的一般要求。动力装置的组成部件,在动力装置的保险期内,应该保有其工作能力不得少于500h,而在车上的工作寿命,在大修前、不经中间拆装,应不少于1000h。为检查动力装置的状况和确定故障,各主要系统和部件应配备有诊断用的传感器,并将各传感器的指示输出到专门的诊断装置中去。⑤为了防火,在动力装置中,应防止油料落入高温区,并应消除它们挥发的油蒸气。⑥当气温低到25°C的情况下,动力装置可进行加载的准备时间应不超过3min,而当气温低到-40°C的情况下,其准备时间应不超过15min(对于活塞式发动机)和3min(对于燃气轮机)。⑦当设计动力装置和动力传动舱时,必需考虑有关提高军用履带车辆生存力的要求:降低热辐射、燃油隔舱化、部件的布置要考虑加强薄弱区和相互屏蔽、两套机构,两套系统、提高部件的抗冲击性。
对动力装置的上述各项要求,随具体的军用车辆的要求予以增减。
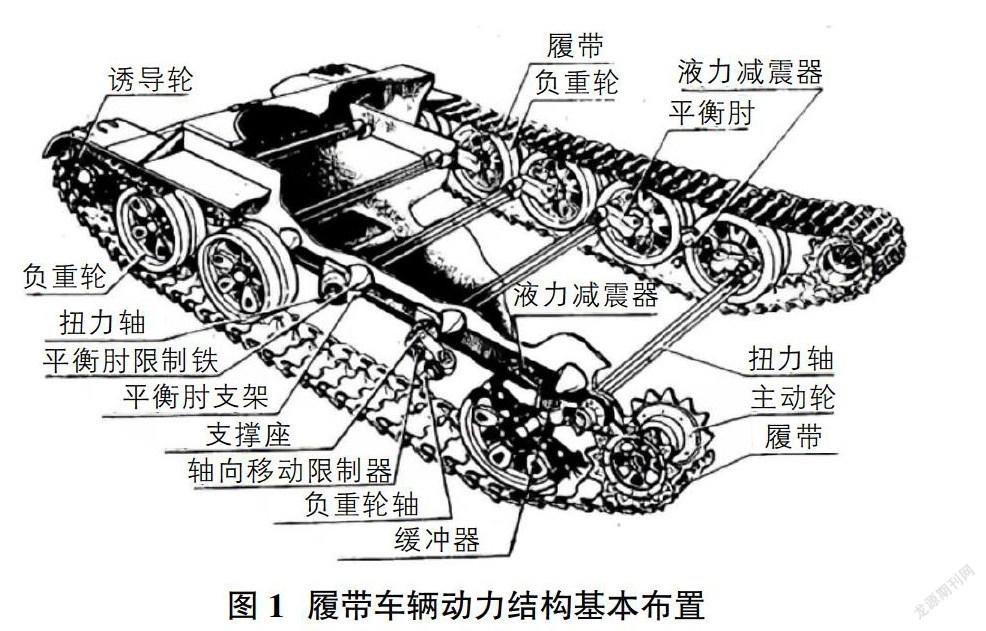
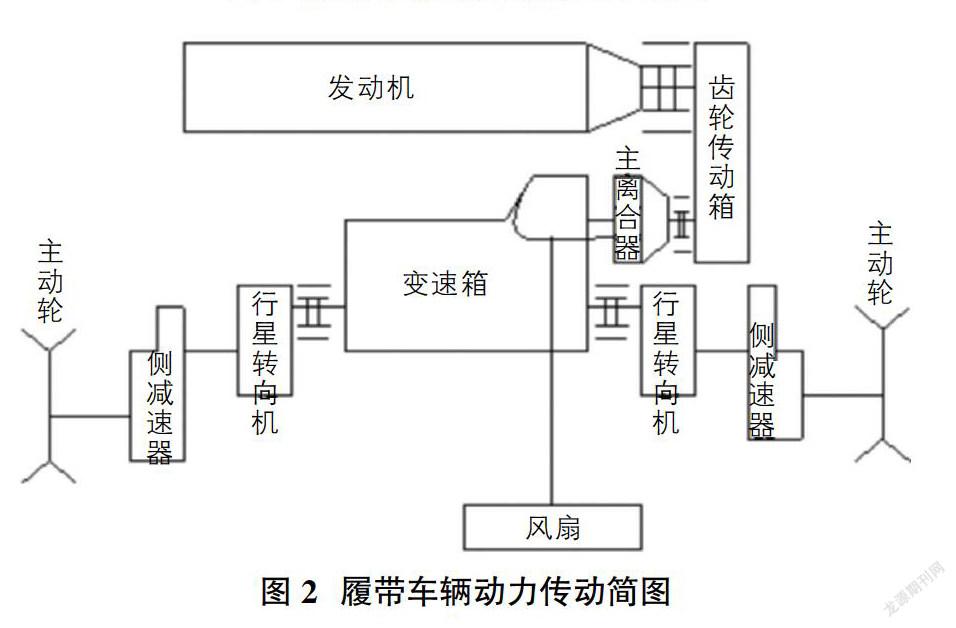
1.2 履带车辆动力传动简图
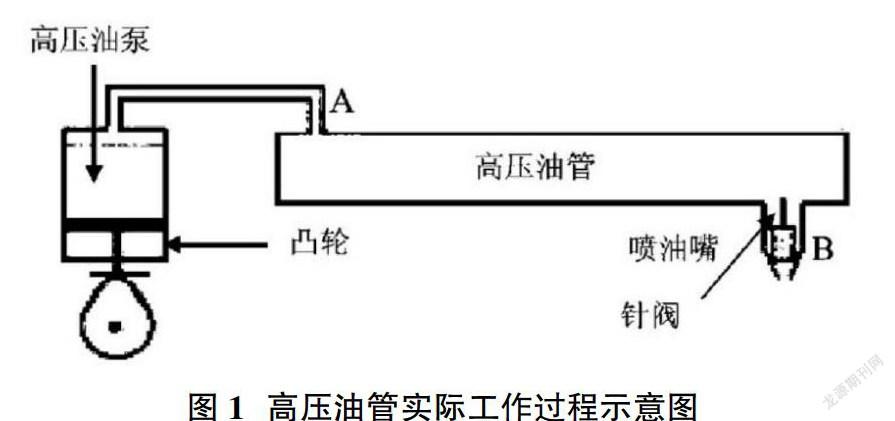
履带车辆动力结构基本布置如图1所示,履带车辆动力传动简图如图2所示。
1.3 特性分析
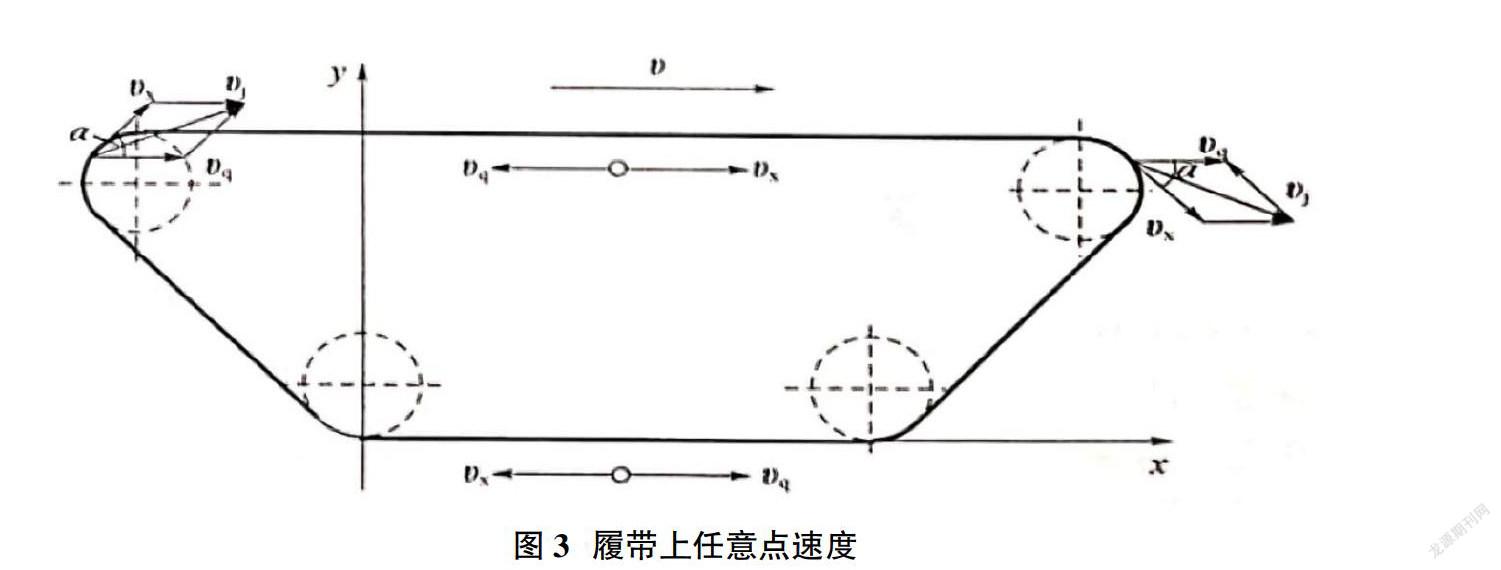
履带车辆直驶过程中,用Vq表示牵连速度,用Vx表示其相对速度,用Vj表示其绝对速度,则Vq、Vx、Vj的矢量关系为:
Vj=Vq+Vx (1)
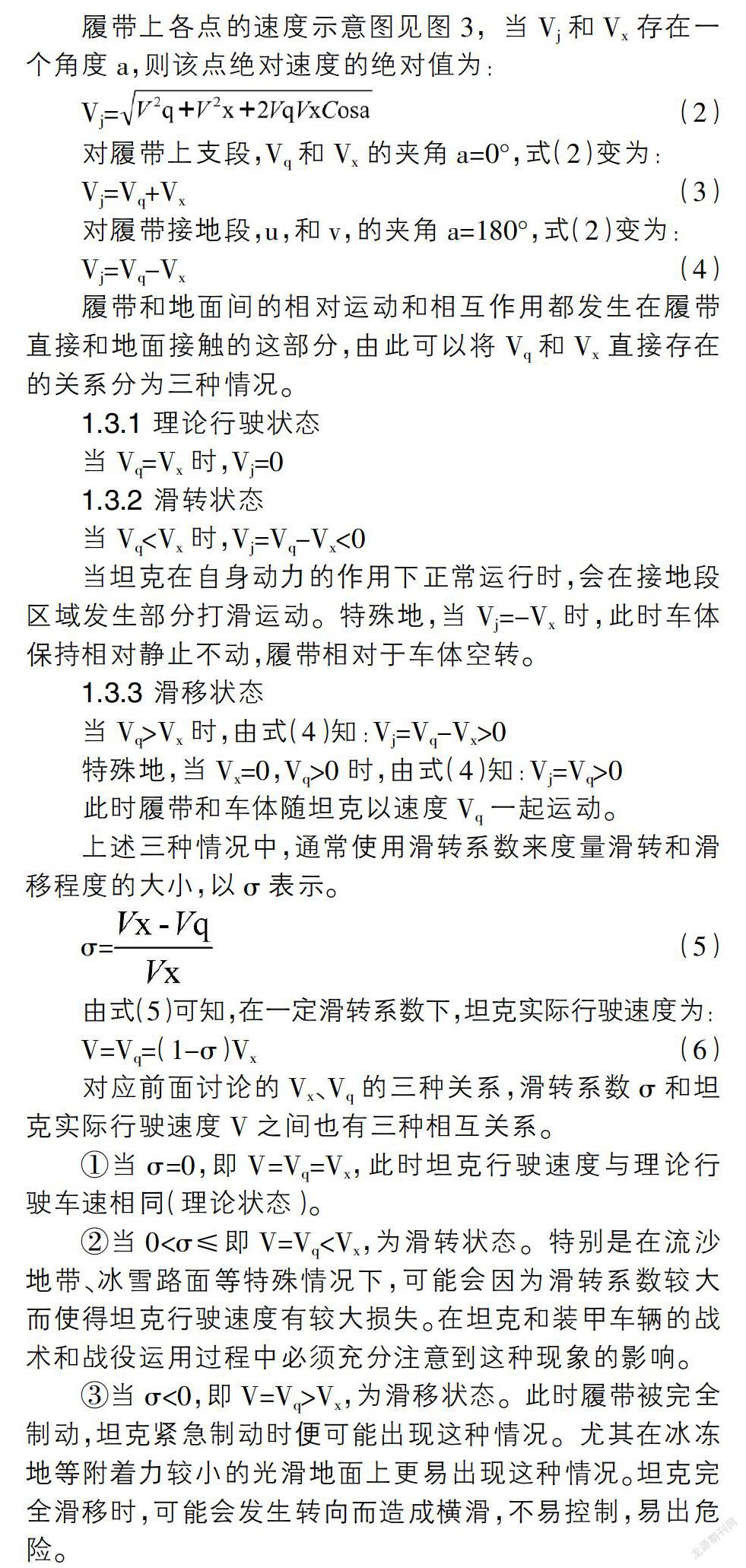
履带上各点的速度示意图见图3,当Vj和Vx存在一个角度a,则该点绝对速度的绝对值为:
Vj=(2)
对履带上支段,Vq和Vx的夹角a=0°,式(2)变为:
Vj=Vq+Vx(3)
对履带接地段,u,和v,的夹角a=180°,式(2)变为:
Vj=Vq-Vx(4)
履带和地面间的相对运动和相互作用都发生在履带直接和地面接触的这部分,由此可以将Vq和Vx直接存在的关系分为三种情况。
1.3.1 理论行驶状态
当Vq=Vx时,Vj=0
1.3.2 滑转状态
当Vq<Vx时,Vj=Vq-Vx<0
当坦克在自身动力的作用下正常运行时,会在接地段区域发生部分打滑运动。特殊地,当Vj=-Vx时,此时车体保持相对静止不动,履带相对于车体空转。
1.3.3 滑移状态
当Vq>Vx时,由式(4)知:Vj=Vq-Vx>0
特殊地,當Vx=0,Vq>0时,由式(4)知:Vj=Vq>0
此时履带和车体随坦克以速度Vq一起运动。
上述三种情况中,通常使用滑转系数来度量滑转和滑移程度的大小,以σ表示。
σ= (5)
由式(5)可知,在一定滑转系数下,坦克实际行驶速度为:
V=Vq=(1-σ)Vx(6)
对应前面讨论的Vx、Vq的三种关系,滑转系数σ和坦克实际行驶速度V之间也有三种相互关系。
①当σ=0,即V=Vq=Vx,此时坦克行驶速度与理论行驶车速相同(理论状态)。
②当0<σ≤即V=Vq<Vx,为滑转状态。特别是在流沙地带、冰雪路面等特殊情况下,可能会因为滑转系数较大而使得坦克行驶速度有较大损失。在坦克和装甲车辆的战术和战役运用过程中必须充分注意到这种现象的影响。
③当σ<0,即V=Vq>Vx,为滑移状态。此时履带被完全制动,坦克紧急制动时便可能出现这种情况。尤其在冰冻地等附着力较小的光滑地面上更易出现这种情况。坦克完全滑移时,可能会发生转向而造成横滑,不易控制,易出危险。
综上所述,滑转系数的不同取值范围可以描述履带的三种运动状态,同时滑转系数绝对值的大小也可以度量滑转或滑移程度的大小。
2 滑转滑移场多点同步测试方法分析
2.1 测试方法
在测试车辆后方用牵引绳连接一辆质量足够大的辅助测试车辆,使测试车辆拥有足够大的阻力矩,随后逐渐增加测试车辆的输出功率,待到测试车辆履带摩擦力与地面附着力相等时,继续增加测试车辆输出功率,使测试车辆发生滑转现象。此时利用激光传感器测出滑转量,根据测量出来的数据与实际参数相比较,进一步得出相关结论。
2.2 方案选择
方案一:在不影响行驶的条件下,将激光传感器固定在履带板外边缘上,在车头或车尾处设置反光板,进行测量。
方案二:在测试履带板上设置反光板,将多个传感器置于车头或车尾处进行测量。
结论:由于将传感器固定在履带板上难度较大,测量时会有剧烈抖动,而且考虑到人与车之间的安全距离,测量时人员实验人员安全难以保障,所以选择方案二。根据均匀法向压力分布情况,研究理想状态下的履带整体运动,现实生活中,车辆运动时,履带与履带之间存在间隙,间隙约为5毫米。前面几块履带版所受驱动力较小,但是考虑间隙后,所受驱动力略大于理想状态。
2.3 实验演示
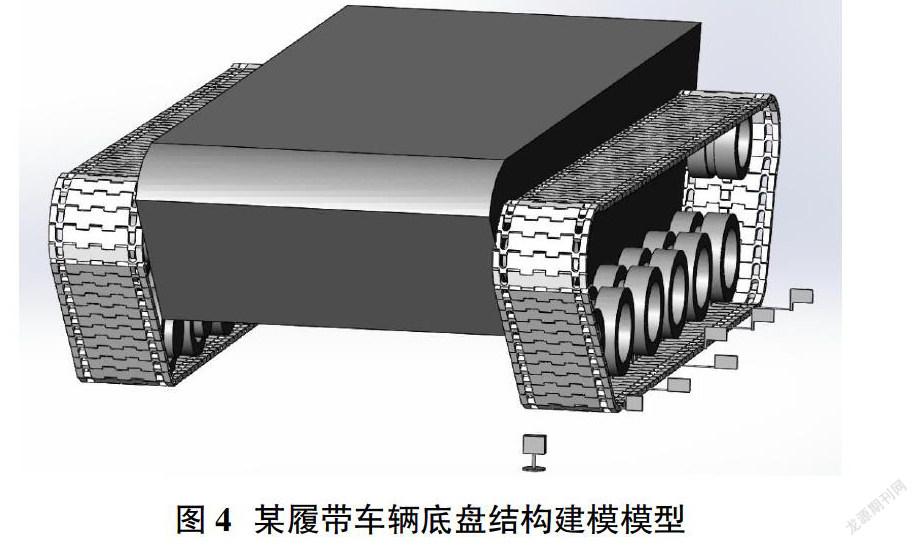
根据相关测量数据,对某型履带车辆底盘建模如图4所示。
根据该型号车辆履带板特点,在一侧履带板上设置若干反光板,将多个传感器置于车头或车尾处进行测量,连接示意图如图5所示,一切准备就绪后平稳启动车辆(车辆前后位置禁止站人),此时反光板随着履带板运动,传感器测量数据传输至相连计算机进行数据收集处理。
3 结语
①依据针对履带车辆滑转滑移场测量问题,运用车辆基础理论,区分滑转滑移场特征分析、滑转滑移场多点同步测试方法分析,测试设备及测试系统分析,滑转滑移场实车测试方案等模块;②通过理论分析,关键子部件选型等步骤,综合运用理论知识解决履带车辆现实中遇到的相关问题;③测量实车相关数据,提出实验测试方案,利用soildwork软件,对履带车辆建立模型;④通过激光传感器测量结果,分析履带车辆滑转滑移性能。
参考文献:
[1]黄祖勇著,贾振中,李升波,胡晓松译.地面车辆原理[J].北京:机械工业出版社,2018.
[2]郭晓林,王涛,刘杰,等.装甲车辆行驶理论[J].北京:国防工业出版社,2017.
[3]李军魁.履带车辆稳态转向性能分析与试验[J].北京:国防工业出版社,2002.
[4]閻清东,张连第,等.坦克构造与设计[J].北京:北京理工大学出版社,2007.
[5]陈淑艳.移动机器人履带行走装置的构型与机动性能研究[J].2008.