车载激光扫描技术在路况检测中的应用
2021-09-22 06:13张向阳钟棉卿
电子技术与软件工程 2021年15期
张向阳 钟棉卿
(甘肃正昊测绘工程有限公司 甘肃省天水市 741000)
1 车载激光扫描技术
车载激光扫描系统随车辆的运动,通过多种传感器收集周围环境的信息。配置的激光扫描仪以每秒百万次至千万次的频率向周围表面实施动态的距离测量,经GNSS/IMU定位定姿系统的联合解算与系统内参数的坐标转换[1],获得每激光束的空间指向,进而得到沿路径的密集三维点云条带。
与地基三维激光扫描仪相比,车载激光扫描系统具有更远的探测距离,利用移动的优势,能高速测量道路沿线的信息。与机载雷达数据相比,车载激光数据距离路面更近,能得到高分辨率的路面影像和高精度、高密集的路面点云[2]。另外,车载的形式更加灵活,对采集数据的环境和天气条件要求更低。与车载摄影测量系统相比,车载激光扫描护具有更高的精度。
目前,商用车载激光扫描系统的扫描范围普遍超过百米。扫描速度,又称为激光重复频率或点频,普遍都能达到百万量级,一些高端产品可达几千点/秒,这对于生成精细的路面模型来说是足够的,也是高效的。另外,车载扫描数据信息量丰富,同一数据集助攻含有多个类别的信息,数据的可利用率显著提高,能激发其在多个行业的应用潜能。
2 工程概况
工程位于长深高速公路(北段),检测对象为部分沥青路面路段。路段基横断面为:0.75m(土路肩)+3.0m(硬路肩)+3×3.75m(车行道)+0.75m(路缘带)+3.0m(中央分隔带)+0.75m(路缘带)+3×3.75m(车行道)+3.0m(硬路肩)+0.75m(土路肩),总宽度34.5m。路面检测任务重,选取了9km长的路段采用车载激光扫描系统进行扫描,利用车载扫描数据检测路况,提供路面破损、路面平整度、路面车辙深度等参数,并与常规检测手段结果做比较,以评价利用车载激光扫描技术开展路面检测的技术适用性与精度。
本项目使用中国测绘科学研究院、北京四维远见信息技术有限公司、首都师范大学多家单位合作研发的SSW车载激光建模测量系统。本项目中系统的安装高度为2.315m,设定的激光发射点频500KHz,扫描线频200Hz。在2.70m高度支架两侧分布搭载3台(共6台)像元大小6μ,2400万像素的相机对路面拍照,获取连续的路面影像,经匹配后生成真彩色路面点云。数据采集时,以中央隔离带为界,对两侧车道分别扫描。
3 利用车载点云数据评价路面状况
3.1 路面破损
一般来说,路面破损包含多种类型,如龟裂、块状裂缝、纵裂、横裂、坑槽、沉陷等。本路段的路面病害主要为横向裂缝、纵向裂缝、龟裂、沉陷,并有部分修补。路面破损基于不同类型,设置了多种分级指标,使用规定的换算系数计算路面破损率DR,得到路面状况指数PCI,由PCI得分情况将路面评定为优、良、中、次、差等级。
本实例将激光点云与影像进行精匹配,将将车载激光扫描系统的获取的影像拼接为基于点云坐标系统的整体路面的正射影像,利用坐标与点云数据关系,在影像数据中识别与标记路面损害类型,勾勒损害的边界,计算损害法平面参数,如块度、缝宽、缝长等。对于必须提供深度的损害类型,如沉陷、坑槽等,由对应坐标处的三维点云数据提供。路面破损率按车道统计,表1列出了检测结果。
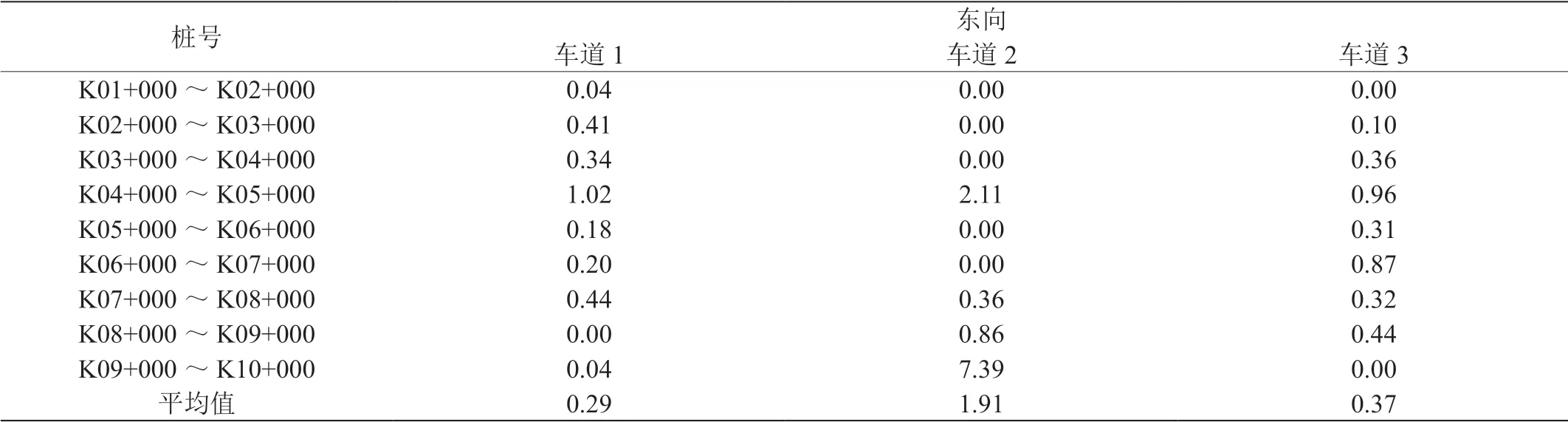
表1:路面破损率DR检测结果(单位:%)
从检测车道的平均破损率来看,车道2的破损率最高,达1.91%,车道1和车道3的破损率相差不大。从每公里的破损率可以看出,路面破损情况并非在整个路段上都有发生,而是在局部路段出现较大的破损率数值,路面破损的类型以纵向裂缝和龟裂为主。破损率较小法路段上,路面损坏的类型以横向裂缝、修补为主。
3.2 路面平整度
我国的路面平整度检测通常采用四分之一车模型获取国际平整度指数(International Roughness Index, IRI)指标。本文基于车辙处的激光点云数据,仿照连续式平整度仪评估路面平整度标准差σ,即在车轮的位置沿路面纵向位置按照一定的采样间隔,采集测试的高程信息,采用数理统计的方法统计方差。车轮位置选择离车道边界0.5m处。
我国交通部公路科学研究所经过大量试验研究,提出了σ与IRI的关系:σ=0.6×IRI。
表2列出了基于纵向激光点云数据计算的平整度指数IRI的检测结果。

表2:平整度指数IRI检测结果(单位:m/km)
根据平整度的检测结果,三个车道的平整度值相差不大,平整度IRI值超过2.00m/km的仅有2个路段,其余基本都在此之下。
3.3 路面构造深度
路面构造深度是表现路面宏观粗糙度、路表面排水及抗滑性能的重要指标。目前我国公路路面构造深度以铺砂法为标准测试方法,其他方法的检测结果须转化为铺砂法的路面构造深度。本文根据铺砂法的检测,基于路面激光点云三维信息计算构造深度。
铺沙法是将已知体积(25cm3)的标准砂摊铺在测试路面上,用底部粘有橡胶片的推平板尽量将砂推平成一圆形,用钢尺测量所构成圆的两个垂直方向的直径,取其平均值,精确至5mm。砂的体积与所摊铺圆平均面积之比即为路面的构造深度,准确至0.01mm。取平均值代表该路面这一点的构造深度。计算公式为:

式中,MTD表示路表面的构造深度;V为砂的体积(一般取25cm3),D为摊平砂的平均直径。
本文仿照铺砂法的原理,以一定的间距沿车辙带选择测点。预设一个虚拟铺砂直径D0,基于采集的点云三维信息计算虚拟铺砂体积V0,与标准铺砂体积(25cm3)比较,基于一个线性模型纠正虚拟铺砂直径D1,再次计算体积V1,使用式(1)计算构造深度。检测结果如表3所示。
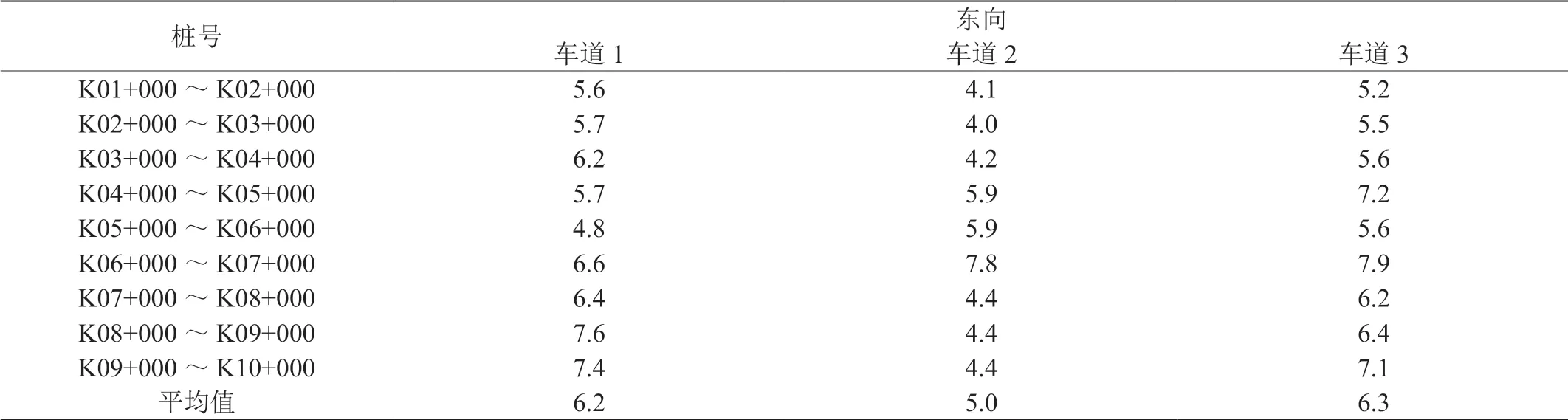
表3:路面构造深度检测结果(单位:mm)
根据路面构造深度的检测结果,各路段数据没有显著的差异。
3.4 与常规方法的比较
本实例为长深高速公路全线路况评定的一部分,已有用常规技术手段提供的结果。本文将利用车载激光扫描得到的路面指标与常规方法评估的路面状况进行比较,以验证车载激光扫描技术对路况调查的技术适应性。由于全线路路面损害也使用了基于图像的方法,因此,只比较了路面平整度和路面构造深度评估的差异。
比较结果表明,基于路面扫描点云评估的构造深度结果基本与使用铺砂法评估的结果相符,在一处存在较大偏差,经查,是由于此路段车辙杂乱,本文统一使用车道一侧0.5m不符合路面实际状况所致。总体评价,基于车载激光点云可以开展路面构造深度的评估。
通过比较结果可知,使用局部路面方差评估的路面平整度与常规方法(1/4车模型)的结果有明显的差异,然而,随里程的变化趋势基本一致。因此本文建议对2种技术手段获取的IRI进行线性回归,使二者的结果尽量相符。然而,平整度检测的方法和设备多样,采用的指标也不尽相同,为使车载激光点云数据适用于路面平整度的计算,有必要构建适合此种数据的模型,并与通用IRI检测方法获取的结果在一段距离的路面上校准。
4 结论
车载激光扫描系统已逐渐应用于道路工程,本文尝试使用车载扫描数据评估路面状况,提取了路面损害、路面平整度、路面车辙的评价指标,与实测数据、路面检测车等提供的结果作比较,验证了该技术对于路况评估的技术适应性和精度。实验证明,利用车载激光扫描数据评估路况是可行的,但需预先在一定长度的路段上对结果的不确定性进行评测与校准。
猜你喜欢
工会博览(2022年5期)2022-06-30
中国交通信息化(2021年2期)2021-07-22
铁道通信信号(2020年8期)2020-02-06
江西建材(2018年1期)2018-04-04
中国公共安全(2017年11期)2017-02-06
电源技术(2015年2期)2015-08-22
机械与电子(2014年1期)2014-02-28
河南科技(2014年8期)2014-02-27