
基于优化减载与动态惯量控制的DFIG参与系统一次调频研究
2021-09-25 02:44彭耀辉章林炜边晓燕李东东
可再生能源 2021年9期
徐 波,彭耀辉,章林炜,边晓燕,李东东
(上海电力大学 电气工程学院,上海 200090)
0 引言
大规模风电并网使电网调频能力下降,影响电网的稳定性[1],[2]。由于风电机组大多运行在最大功率跟踪(MPPT)模式下,风电机组与电网解耦运行时,无法响应系统频率变化[3]。虚拟惯性控制可以有效提高风电机组的调频能力[4],[5],但虚拟惯性控制是利用转子动能参与系统调频,过多释放转子动能容易使风电机组转速过低,影响其稳定运行。同时,风电机组调频能力受其运行状态影响,波动性较强。
为提高风电机组调频能力,有关学者提出了超速减载控制策略[6]。文献[7]采用固定10%减载率并结合虚拟惯性控制,提高了风电机组调频能力,但固定减载率灵活性较差,高风速时效率较低,且减小了风电机组的有功出力。文献[8]通过优化算法,根据风速变化动态调整风电机组减载率,具有一定的灵活性,但其减载率选择的合理性有待验证。以上文献减载率的选择均未考虑系统运行状态,无法根据系统运行状态动态调整。
本文提出了一种风电机组优化减载方法。正常运行时,若系统负荷过高,风电机组采用较小减载率,以增大有功输出。若系统负荷较低,采用较大减载率,以减小有功输出。系统受到扰动时,根据系统频率变化动态调整风电机组减载率,调整风电机组有功储备,参与系统调频。针对风电机组的惯量水平,本文提出了风电机组动态惯量控制方法,风电机组可以根据其运行状态动态调整虚拟惯性系数。本文方法能够根据系统运行状态动态调整风电机组减载率,提高了其参与系统调频的灵活性和系统频率稳定性,还提高了风电机组调频能力,并能根据风电机组运行状态适当参与系统调频。
1 风电机组模型
本文基于双馈风电机组进行研究。根据空气动力学模型,风电机组捕获的风能功率为[9]

式中:Pm为风电机组功率;ρ为空气密度;Sw为叶片的扫掠面积;CP为风能利用系数;v为风速;λ为叶尖速比;λopt为运行在MPPT模式下的叶尖速比;β为桨距角;ωr为叶片旋转角速度;R为叶片半径。
风电机组的摇摆方程为[10]

式中:Hwt为机组等效物理惯性时间常数;Tm为机械转矩;Te为电磁转矩。
2 优化减载控制
2.1 系统正常运行时优化减载控制
2.1.1 各风速下减载率优化求取
本文所提控制策略针对中、低风速(v=6~12 m/s)进行研究,超速减载控制在一定程度上能提高风电机组调频能力[11],但定减载率控制在实际应用中缺乏高效性与灵活性[12]。目前变减载率大多通过离线计算获得,在系统运行状态发生变化时,固定的减载率不再合适。因此,减载率应根据系统运行状态动态调整。
超速减载控制原理如图1所示。A点为最大功率跟踪运行点,B点为在一定减载率下的超速减载运行点。超速减载控制使得风电机组有功输出减少,但增加了转子转速,风电机组旋转动能增加。

图1 某风速下超速减载示意图Fig.1 Over-speed deload control
当风电机组运行在超速减载点(B点)时,风电机组转子动能增加量为

式中:ωd为待优化求取的超速减载控制下风电机组转速;ωopt为MPPT模式下风电机组转速。
设风速采样时间间隔为T,本文取10 s。假设时间T内风速保持不变,则Popt与Pd均保持不变。在此期间因超速减载造成的发电量损失 ΔEs为

式中:Popt为MPPT模式下风电机组有功输出;Pd为减载控制下风电机组有功输出。
将转子动能增加 ΔEk视为减载控制带来的收益,而 ΔEs为所需成本。由此可以建立最优化目标函数为

式 中:γk,γs为 权 重 系 数。
为提高风电机组发电率和调频能力,在中风速 时(v=8~12 m/s),风 电 机 组 调 频 能 力 较 高,应 尽可能提高其发电率,γk取0.5,γs取0.5。在低风速时(v=6~7 m/s),风 电 机 组 调 频 能 力 较 弱,发 电 量较少,应尽可能调高其调频能力,γk取0.7,γs取0.3。风电机组固有物理惯量Jwt,桨叶扫过面积Sw,桨叶半径R等相关参数可从风电机组参数表中获得,空气密度ρ为已知值。
在不同风速下分别求取各优化参数,其约束条件为

本文采用粒子群优化算法对式(7)进行求解。粒子群算法最早由Eberhart和Kennedy在1995年提出,它源于对鸟类觅食行为的研究,模仿鸟类觅食过程进行最优化求解[13]。与遗传算法相比,粒子群优化算法更高效,使用求解函数数量更少[14]。
通过优化算法可求得风电机组超速减载后的角 速 度 ωd,进 而 通 过 式(1)~(3)可 推 导 出 此 时 有功输出Pd,则风电机组减载率为

改变风速,重复上述过程,求得不同风速下风电机组最优减载率。风速v和减载率d'的关系如图2所示。

图2 不同风速下减载率Fig.2 Over-speed deload rate at different wind speed
2.1.2 不同负荷水平下风电机组减载率动态调整
传统变减载控制并不考虑系统负荷情况,灵活性差,发电效率低。本文考虑了系统负荷情况,优化调整风电机组减载率。系统负荷较小时采取高减载率,从而减小风电机组出力、增加有功备用;而负荷较大时采用低减载率,从而增加有功输出。
目前,系统负荷情况可以通过负荷预测方法获得[15]。假设通过负荷预测得到日负荷曲线中未来某一时刻系统瞬时负荷为PL,该日平均负荷为Pav,定义系统负荷比为

考虑系统负荷时,风电机组减载率为

综合考虑风电机组运行状态和系统负荷情况,确定风电机组减载率的流程如图3所示。

图3 不同风速下减载率取值流程图Fig.3 De-load rate calculation flow chart
由图3可知,通过考虑系统实时负荷水平,动态调整风电机组减载率,既增强了风电机组调频能力,又提高了发电效率。
2.2 系统受到扰动后减载率动态调整方法
当系统受到扰动后,传统虚拟惯性控制利用风电机组转子动能,进行短时间的频率调整,但过多地释放转子动能容易使风电机组过度响应,影响其稳定运行[3]。系统受到扰动后,本文所提方法通过动态调整 λ值,以改变风电机组减载率。进而调整有功储备,使风电机组参与系统一次调频,为系统提供较长时间尺度的有功支撑。
根 据 式(1)~(4)可 以 推 导 出 减 载 率d与 叶 尖速比 λ之间的关系。进而,由图2可得叶尖速比 λ与风速v间关系。
系统受到扰动后,叶尖速比动态调整为

式中:λd为减载控制下风电机组叶尖速比,其随风速与系统负荷变化,经过每次采样不断更新;Δλ为随系统频率变化而动态调整的叶尖速比。

频率偏差与叶尖速比偏差间关系为式中:λopt为MPPT模式下叶尖速比,通常为8.1;Δfmax为系统安全运行范围内允许的最大频率偏差,系 统 容 量 较 小 时,Δfmax=±0.5 Hz[16]。
系统受到扰动后,减载率动态调整过程中风电机组有功与转速变化如图4所示。

图4 减载率动态调整过程Fig.4 Dynamic adjustment process of load shedding rate
由图4可知,当系统负荷增加导致频率下降时,频率调整为A→A'→A的过程。A→A'过程中 λ值减小,从而减载率降低,增大了风电机组有功输出。同理,当系统负荷减小时频率调整为A→A″→A的过程。
3 风电机组动态惯量控制
通过控制叶尖速比调整风电机组减载率,为系统提供较长时间的有功支撑,并且不会出现风电机组过度响应现象。但扰动初期频率偏差往往较小,无法提供较大的有功支撑,未能充分发挥其调频能力。因此,还须要动态惯量控制相配合,共同响应系统频率变化。
根据式(4)可以推导出虚拟惯量控制在单位时间内,风电机组旋转动能变化量为

式中:ωr为风电机组旋转角速度。
在虚拟惯量控制过程中可以近似认为,风电机组动能变化量全部转化为系统电能。即:

把 式(14)代 入 式(15),两 边 同 时 积 分 可 得 虚拟惯性系数Kinertia与风电机组固有惯性时间常数间关系为

优化变减载率和动态惯量控制原理如图5所示。

图5 优化变减载率和动态惯量控制原理图Fig.5 Optimized load shedding and dynamic inertia control
4 仿真验证
在Matlab/Simulink中搭建两区域电力系统,如图6所示。区域1含有由310台1.5 MW双馈式风力发电机组成的风电场和900 MW同步发电机G2。区域2含有两台900 MW同步发电机G3,G4。所有风电机组的减载率均按照前文提出的方法设置,并参与系统一次调频。t=50 s时,在区域间设置负荷扰动为LD=300 MW。

图6 两区域仿真系统Fig.6 Two areas simulation system
表1 仿真主要参数Table 1 Simulation parameters
为了验证本文的控制方法,分别考虑不同负荷、不同风速工况。同时,将本文所提控制方法(ODRIC)与以下3种控制策略进行了对比分析。①策略A为无减载控制,无虚拟惯性控制;②策略B为无减载控制,传统虚拟惯性控制;③策略C为10%定减载控制,优化、自适应系数控制[17]。
虚拟惯性控制原理如图7所示[18]。本文KH=15,KD=20。

图7 传统虚拟惯性控制原理图Fig.7 Traditional virtual inertia control
4.1 不同负荷下仿真验证
本文提出的控制方法先优化求取各风速下最优减载率;再根据系统负荷情况,调整风电机组的减载率,使减载率能够随系统负荷灵活变化,进而提高其调频能力和发电效率。分别在系统轻载与重载两种工况下进行仿真分析。
4.1.1 系统轻载时
仿真设置风速固定为10 m/s,按式(10)设置l为94%。仿真并记录数据。轻载时系统频率、风电机组出力和转速变化如图8所示。由图8可以看出,正常运行时,由于此时系统负荷水平较低,本文方法ODRIC通过提高风电机组减载率,既提高了风电机组转速与有功备用,又减小了系统频率偏差。在系统轻载时,在ODRIC控制下,风电机组具有更高的减载率,因此具有更高的调频能力。t=50 s时系统受到扰动,ODRIC能根据风电机组运行状态,动态调整风电机组减载率和虚拟惯性系数,提供更多的有功支撑,系统具有更小的频率偏差。


图8 风速为10 m/s,l=94%时仿真结果Fig.8 Simulation results at wind speed 10 m/s,l=94%
4.1.2 系统重载时
调整系统负荷比l=106%,保持风速与扰动大小不变。同样可以得到系统频率、风电机组出力和转速变化如图9所示。
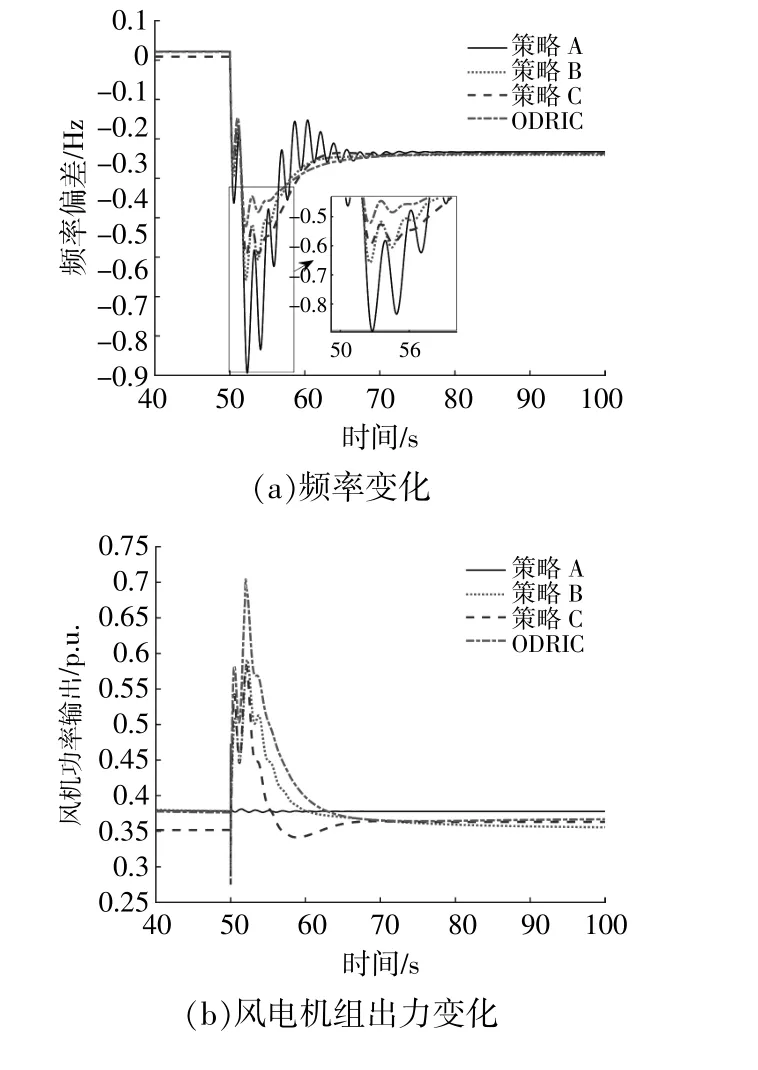

图9 风速为10 m/s,l=106%时仿真结果Fig.9 Simulation results at wind speed 10 m/s,l=106%
由图9可知,正常运行时,由于系统重载,本文方法ODRIC将采取较小的减载率,增大风电机组有功输出。此时,相比其他控制策略,ODRIC使系统具有最小的频率偏差。在ODRIC控制下,风电机组转速较高,具有较高的调频能力。在系统受到扰动后,ODRIC能够充分释放风电机组存储的有功,减小频率偏差。
4.2 不同风速下仿真验证
不同风速下,风电机组调频能力不同。为了验证在不同风速下,本文所提控制方法的有效性和优越性,仿真分别采用中风速(10 m/s)和低风速(7 m/s)两种情况进行验证。
4.2.1 中风速时
设置风速为10 m/s,l=100%。扰动大小保持不变,仿真结果如图10所示。

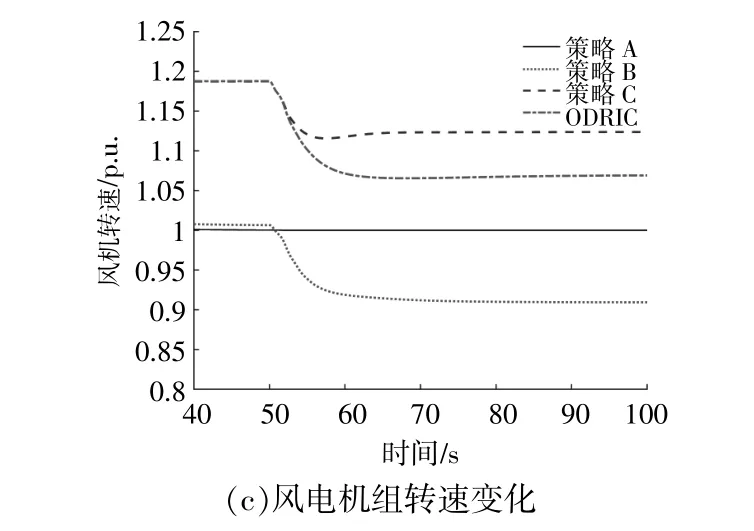
图10 风速为10 m/s,l=100%时仿真结果Fig.10 Simulation results at wind speed 10 m/s,l=100%
由图10可以看出,本文方法可以根据风电机组运行状态充分地发挥风电机组调频能力,频率波动小,使系统具有更小的故障率以及频率偏差。
4.2.2 低风速时
设置风速为7 m/s,l=100%。扰动大小保持不变,仿真结果如图11所示。

图11 风速为7 m/s,系统l=100%时仿真结果Fig.11 Simulation results at wind speed 7 m/s,l=100%
由图11可知,当风电机组运行在低风速时,其转速较慢,调频能力较低。由于策略B采用固定调频系数,过度响应频率变化。在系统受到扰动数秒后,出现负的有功支撑,极易引起频率的二次跌落,威胁系统频率稳定。策略C为保证风电机组稳定运行,优化调整风电机组调频系数。这种方法过于保守,风电机组提供的有功支撑过低,反而增加了系统频率偏差。
ODRIC在低风速时具有较高的减载率,使风电机组运行在较高转速下。同时,系统受到扰动后,通过适度释放转子动能,风电机组能够平滑、连续地提供有功支撑。
5 结论
本文提出了一种风电机组优化减载与动态惯量控制方法。该方法能动态调整风电机组减载率,可以根据风电机组转速动态调整动态惯量。与传统虚拟惯性控制方法相比,本文方法可以有效防止风电机组调频过程中过度响应,有效防止频率的二次跌落。最后,通过不同风速、负荷水平等工况下的仿真表明:系统正常运行时,本文方法能根据系统负荷水平和风速动态调整风电机组减载率。提高了风电机组调频能力,又减小了系统频率偏差。扰动发生后,本文方法能够根据风电机组运行状态,动态调整风电机组减载率与动态惯量控制系数。保证风电机组稳定运行的同时,为系统提供更大、更持久的有功支撑。
猜你喜欢
电力系统保护与控制(2022年19期)2022-10-21
现代电力(2022年2期)2022-05-23
能源工程(2021年5期)2021-11-20
铁道建筑(2021年10期)2021-11-08
智富时代(2019年5期)2019-07-05
智富时代(2019年5期)2019-07-05
科技传播(2019年24期)2019-06-15
汽车工程(2019年4期)2019-05-07
现代农业科技(2018年11期)2018-08-14
消费导刊(2018年8期)2018-05-25
