
新型家用智能植物浇水装置的结构设计与仿真
2021-10-05 12:53胡海霞于天生毕亮亮孟利民夏领兵
智能计算机与应用 2021年5期
胡海霞,于天生,毕亮亮,王 浩,孟利民,夏领兵
(1安徽理工大学机械工程学院,安徽 淮南232001;2安徽理工大学矿山智能装备与技术安徽省重点实验室,安徽 淮南232001)
0 引 言
新工业革命的背景下,各种智能化技术不断发展进步,智能技术从制造业向传统消费领域扩展。随着科学技术力量的增强和人们生活水平的提高,智能家居已逐渐进入人们的生活[1]。人们越来越热衷于在家或办公室里种植各种花草净化空气,陶冶情操,营造良好的生活环境。然而,生活节奏加快,工作的繁忙或是外出旅游或者出差,这些花草经常处于被疏于打理或无人浇水的状态,给爱花草的人带来很多麻烦[2]。养花最重要的问题就是浇水问题。研究表明,花草80%以上的死亡是由于浇水不当引起的[3]。因此,设计一种家用智能植物浇水装置具有重要的应用价值和现实意义。
目前市场上自动浇水装置的种类比较多,如利用物理原理自动渗水;仅限于报警而不能进行浇水,相对比较经济的缺水报警器以及能定时浇水的自动浇水系统等等[4]。总的来说,这些装置的功能还不够完善,工作效率不高,同时固定式浇花装置影响环境美观。因此,植物浇水装置仍是目前非常必要的研究课题。浇水装置是否方便可靠地运行主要取决于浇水装置的轮子。本浇水装置车轮全部采用麦克纳姆轮,具有四轮独立驱动,精密微动,精准定位等特点,可以在无需装配车轮转向装置下实现车体的直行、侧移、斜行、自转等全方位移动。可以在有限的空间内灵活移动,工作效率高、操作便捷,同时可以针对不同植物进行合理的浇水。
1 家用植物浇水装置的设计
家用智能植物浇水装置主要由全向行走装置、检测装置、视觉识别装置、储水装置、喷洒装置组成。为了提高运动系统的稳定性,全向行走装置的移动平台选择矩形结构,底部有4个麦克纳姆轮。麦克纳姆轮是由若干个小滚子包络成的圆形,每个小滚子都有一个与之相配的滚子轴,滚子轴安装在轮毂上,每个滚子都可以绕与自身配对的滚子轴自由转动,如图1所示。全向移动平台的上方有一矩形槽平台,中间用铜柱隔开,用来放置电路、电源、传感器等模块。检测装置借鉴了机械手结构,其主要部件包括机械臂、舵机、气缸以及湿度传感器;视觉识别装置通过摄像头扫描二维码获得适合植物生长的土壤湿度信息,通过传感器检测土壤湿度;储水装置安装在平台上方开设的矩形槽内,矩形槽的大小与水箱外侧的长度和宽度一样,矩形槽的高度足以固定水箱;喷洒装置主要是由洒水喷头、压力开关、管道等组成;潜水泵放置在水箱中,通过水管把潜水泵和花洒喷头连接在一起;花洒喷头固定在花洒支架上,并且可以绕定轴旋转,方便调节喷洒的角度。利用Solidworks软件三维建模并针对关键部件进行有限元分析。其机械结构整体设计如图2所示。

图1 麦克纳姆轮外形结构Fig.1 Shape structure of the Mecanum Wheel

图2 家用智能植物浇水装置机械整体结构Fig.2 The whole mechanical structure of household intelligent plant maintenance device
2 浇水装置的组成与分析
智能浇水装置的检测系统主要由水位监测单元、湿度检测单元、系统主控单元、电阀门控制单元、稳压供电单元等模块构成。其中水位监测装置可以在水量不足时及时补水,在水箱装满后自动断水的效果。系统需要精确的了解到水箱中的水位信息,并及时做出反馈,系统水位检测电路图如图3所示。

图3 系统水位检测电路图Fig.3 Circuit diagram of water level detection system
通过湿度传感器监测土壤湿度,利用传感器显示的数值与盆栽所需土壤湿度对比,小于所需数值则启动自动浇水设备,打开水管阀门,及时供应水分;当达到预先设置的湿度值时,自动关闭阀门,停止供水。湿度检测系统的电阻阻值比较电路图如图4所示。通过检测输出电压值的大小来判断土壤的干湿状态,并通过LED灯显示,若LED灯亮则表明土壤较湿润,若LED灯不亮则表示土壤干燥。此功能能够让盆栽处于适宜的湿度。

图4 湿度检测系统的电阻阻值比较电路图Fig.4 Comparison circuit diagram of resistance value of humidity measuring system
运动路径的精确控制是完成对植物浇水的重要环节。目前,机器人导航系统中,常用惯性导航和激光雷达的组合的方式[5],并采用TOF(time of flight)激光测量方法。本装置主要适用于在家庭、公寓、办公室等场所,工作环境相对固定,可以通过激光雷达来建图,获得工作环境的相关信息。当雷达工作时,定位传感器通过雷达扫描定位,获得当前所在的位置以及姿势,通过计算分析以获得最佳的控制轨迹,从而实现对浇花装置运动路径的精确控制。
基于二维码的快速视觉识别检测技术实现视觉控制功能[6]。每株植物盆上均贴有二维码,通过二维码存贮相关植物的名称、喜好、土壤湿度范围等信息。当该浇水装置到达预定的位置时,首先通过视觉系统扫描识别贴于花盆上的二维码,获得适合植物生长的土壤湿度范围;然后机械手操控湿度传感器检测土壤湿度;若检测到的湿度不在植物最佳生长范围,根据检测到的湿度与最佳湿度的差值,确定浇水量,潜水泵工作,通过花洒喷头浇水。若不需要浇水则继续检测下一个植物。若装置未检测到二维码,则会在15s后移动到下一植物。机器在完成工作后,会从终点位置回到起点。该装置每天检测一次。为保证任务的正常进行,水箱内的水位传感器会时刻检测水箱内的水量,若水箱内的水量未达到要求的浇水量,机器则会返回起点进行补水。
本浇水装置的矩形全向移动平台由4个麦克纳姆轮组成,每个麦克纳姆轮由一个电机单独驱动。Mecanum轮是一种性能优越,应用广泛的全方位移动机构,可以在狭小的工作空间内灵活地实现三自由度运动,通过这3个自由度的组合,使平台整体在姿态保持不变的情况下,沿任意路径到达目标位置,能够很好地完成项目要求。工作时,由电池给4个电机供电,电机输出轴转动,电机的输出轴和麦克纳姆轮通过法兰固定在一起,电机转动带动4个麦克纳姆轮旋转。由于4个轮子分别由4个电机操控,因此4个轮子可以有不同的转速,通过控制电机不同的转速和转向,4个麦克纳姆轮的速度合成之后,则可以实现随意的控制浇花装置的行进位置[7]。
图5所示为地盘轮子标号示意图,为了方便计算,定义全向底盘的轮距为2a,轴距为2b。 可见,麦克纳姆轮通过4个轮子不同速度的组合,全向轮底盘能产生不同的作用力,从而有不同的运动效果。如果想要精确的控制运动轨迹,那么就需要了解4个轮子中心的运动速度。假设为轮子轴心的运动速度矢量;为麦克纳姆轮轴心沿垂直于r的方向的速度分量为全向轮底盘的运动方向矢量,全向轮底盘的逆运动学方程为式(1)[7]:
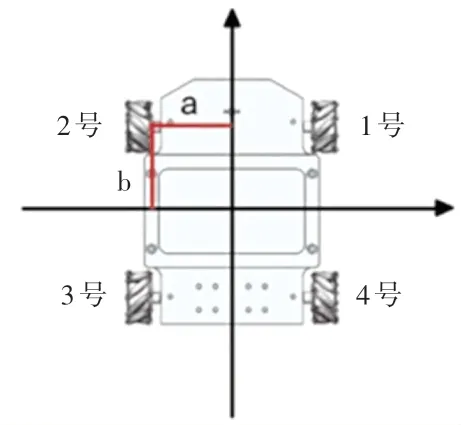
图5 地盘轮子标号示意图Fig.5 Schematic diagram of the turf wheels’label

其中,ω为电机的转速,将全向轮的运动方向和自传速度带入到逆运动学方程,可得4个电机对应的转速,从而可以精确控制全向底盘的运动轨迹。当更改输入量为行进的方向θ(设以X轴正方向为0°),可得式(2):

其中,v为行进的速度,ω为自旋的角速度。输入量不同,逆运动学的方程表达式形式也不同,但是最后的结果都是为了得到4个轮子的各自的转速,实现确定的运动轨迹。
3 家用植物浇水装置的仿真分析
3.1 移动平台仿真分析
利用SolidWorks中的插件simulation进行静力学仿真。在有限元分析中,为了便于计算和分析,对模型进行了简化,用外力代替水箱,提高了运算效率。由于车身间没有相对运动,故这将矩形槽平台、底板、铜柱、电机、法兰定义接触为接触接合;同理,将滚子轴,轮毂定义为结合;将轮毂与法兰之间添加销钉链接,不产生相对移动。连接定义完成后,对浇花装置添加引力和施加430 N的外部载荷。
全向移动平台静应力分析图如图6所示。可见,最大应力发生在麦克纳姆轮轮毂与滚子轴的配合处,且 在 外 载 荷 为430 N时,最 大 应 力 为92.14 MPa,显然在静应力时满足要求。因此,滚子轴和轮毂的材料选择合金钢,在浇花装置运动时,同样能够满足要求。移动平台位移图如图7所示。可见,浇花装置的最大形变发生在矩形槽平台中部,且最大位移约为0~16 mm,变形可忽略不计,该变形不会影响浇花装置工作的稳定性。

图6 全向移动平台的静应力分析图Fig.6 Static stress analysis diagram of the omni-directional mobile platform

图7 全向移动平台位移图Fig.7 Displacement diagram of the omni-directional mobile platform
3.2 花洒平台仿真结果分析
花洒平台的静应力分析图如图8所示。可见,最大应力处为麦克纳姆轮轮毂与滚子轴的配合处。因此,当花洒上的载荷和全向移动平台上的载荷综合作用时,危险截面亦为麦克纳姆轮与滚子轴的配合处,通过分析可知该处应力值远小于合金钢的许用应力,因此构件在运转中是安全的。花洒平台位移图如图9所示。可见,花洒平台的最大形变位移发生在花洒平台两端顶点处,且最大位移约为0~19 mm,该变形与实际尺寸相比可忽略不计,不会影响浇花装置工作的稳定性。
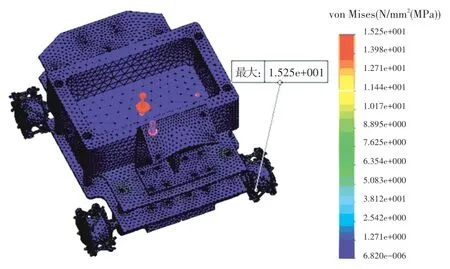
图8 花洒平台静应力分析图Fig.8 Static stress analysis diagram of the spraying platform

图9 花洒平台位移图Fig.9 Displacement diagram of the spraying platform
4 结束语
随着科技的进步,人们的生活水平不断提高,家居智能化给人们的工作,生活和观念带来巨大的变化。本文所设计的家用智能花草浇水装置具有高度的智能性。利用湿度传感器测量土壤的湿度,并将湿度信息反馈给养护装置;通过麦克纳姆轮的全向移动平台实现任意方向的运动,运行方式可靠。该装置总体结构简单,成本较低,效率较高,便于移动,在较小的空间内也能很好的进行工作。
猜你喜欢
阅读(低年级)(2022年6期)2022-06-17
阅读(低年级)(2022年3期)2022-03-30
知识窗(2021年4期)2021-10-02
青少年科技博览(中学版)(2021年11期)2021-03-07
保健与生活(2021年1期)2021-02-04
Coco薇(2017年10期)2017-10-12
进出口经理人(2016年8期)2016-11-04
科技创新导报(2016年5期)2016-05-14
时代英语·高二(2015年2期)2015-05-18
中国信息化·学术版(2013年5期)2013-10-09
