电磁曲射炮实验装置的设计与实现
2021-10-08 02:22刘文昊高传智
计算机测量与控制 2021年9期
刘文昊,高传智,谢 玮
(哈尔滨工业大学(威海)信息科学与工程学院,山东 威海 264209)
0 引言
随着现代军事科技技术的发展,电磁炮的先进发射技术逐渐普及。从电磁炮制作爱好者到大学生科技立项、再到国家级的电子设计大赛,都对模拟电磁炮技术有深入的研发要求。电磁炮是通过电磁场提供动能发射技术的先进武器[1-2],涉及到电磁学、运动学、机电定位机构和自动控制系统设计等诸多学科知识。对于电磁炮爱好者或者初级研究者来说,要做一个实用化的小型电磁炮还会遇到诸多困难。因此本课题在参加2019年全国大学生电子设计大赛的基础上,结合实验室教学的需要,给出一种电磁曲射炮实验装置的设计与实现方法,可以作为电磁炮运动学,图像识别,单片机控制系统和物理实验验证的教学用具。同时也给初学者一个详细的理论设计和实验构建过程指导作用。线圈型的电磁炮具有制作简单,推力大和可控性高等优点[3],因此受到广大电子爱好者的喜爱,目前的研究大多偏重于做一个电子设计或者参加比赛[4-5],从实验装置层面来系统考虑的设计不多,因此本课题给出的实验装置和系统的设计过程,将有助于帮助学生更好的融合相关知识,深入理解电磁曲射炮的原理和实验装置的设计和实现过程。
1 电磁曲射炮实验装置设计
1.1 实验装置整体概述
该实验装置是一个由单片机控制的曲射线圈电磁炮实验装置,该装置可以通过手动输入给试验装置的相关参数,执行向固定方向,固定距离发射弹丸,也可以通过OPENMV摄像头模块[6]和TFmini激光传感器模块对目标进行识别和自动打击,线圈炮发射的仰角,方位角,弹丸初速和识别算法均可修改,可以作为电磁炮运动学,图像识别,单片机控制系统和物理实验验证的教学用具。
该实验装置基本功能分为5种模式,这些模式可以通过拨码开关进行设置,当前模式,输入数据等参数均显示在LCD屏幕上,分别介绍如下。
1)向固定位置发射炮弹:
电磁炮装置在进入模式1后,单片机自动设定水平角度0度,距离210 cm,按下矩阵键盘上的发射按键,电磁炮会发射炮弹。
2)向自定义位置发射炮弹:
电磁炮装置在进入模式2后,用户通过键盘设定发射距离和水平角度,按下矩阵键盘上的发射按键,单片机控制云台调整到设定的水平角度和仰角,控制电磁炮发射炮弹。
3)自动瞄准模式A:
电磁炮装置在进入模式3后,电磁炮云台水平旋转,同时通过OPENMV摄像头模块使用模块匹配算法和颜色识别算法识别引导靶[19],识别到引导靶后,控制云台转动对准引导靶[20],不再转动,通过TFmini传感器测量引导靶距离,根据距离调整云台仰角,发射炮弹。
4)自动瞄准模式B:
电磁炮装置在进入模式4后,电磁炮云台在-30°~30°持续水平左右转动,仰角始终保持与预设距离对应的角度不变,在发现引导靶且引导靶接近图像中央时发射炮弹,同时云台在水平角度方向继续保持旋转。
5)弹仓装填炮弹模式:
电磁炮装置在进入模式5后,电磁炮动作根据拨码开关的选择执行模式3或模式4的动作,只是会在发射炮弹之后,自动从弹仓内向炮管中装填一枚炮弹,但弹仓内的炮弹需要手动装填。
1.2 发射机构的分析和计算
1.2.1 发射机构原理说明
如图1所示,电磁炮发射机构采用了磁阻式电磁弹射装置,当线圈通电时,弹丸处于不同位置会使得线圈磁路的磁阻不同,弹丸处于线圈外部时磁阻较大,此时线圈会对弹丸产生电磁吸力以使得弹丸进入绕组中部,从而使磁阻最小,同样若弹丸处于绕组前部,线圈会对弹丸产生阻力[17],因此使用电容快速放电的特性,让线圈仅通电较短时间,以确保线圈尽可能少地对电阻施加阻力,提高能量利用效率。此时弹丸的初始位置极大地影响了电磁炮的发射速度[8-9],在这里选取了线圈前1 cm左右处作为弹丸初始位置。

图1 发射机构示意图
1.2.2 发射机构参数计算
设线圈匝数为W,线圈中所通平均电流为,则磁路磁势大小:
F=WI0
磁通大小Φ=F/Rm,其中Rm=L/μ0S为磁阻,L为磁路长度,S为线圈截面积。
磁阻电磁力大小[7]:
故线圈对小球所做的功为:
其中:L0为小球等效磁路长度,则小球发射初速度为:
设计要求小球发射距离不小于3 m,则小球初速度不小于5.4 m/s,小球质量m为3.5 g,则线圈对小球做功为0.051J,电磁炮磁路长度L取6 cm,亚克力管直径为14 mm,故磁路面积取2 cm2,小球磁路长度L0取小球直径,即9.5 mm,由于线圈没有磁芯,故其感抗在数值上远小于电容容抗和线圈内阻,故电容放电过程可以看作RC电路的放电过程,3倍时间常数τ后电流基本为0,故等效电流I0取:
其中:r为电容和线圈的总内阻,假设为0.1 Ω,电容使用1 000 μF,500 V的电解电容,电容工作电压取200 V(若计算值与实际值有误差,可以采用适当增减电压的方式进行调整),解得匝数为291匝,取300匝,电容放电时间常数:
τ=Cr=1×10-4s
远小于小球运动1.5 cm所需时间0.03 s,故认为电容取值合理。
2 系统的硬件设计
2.1 系统总体框图

图2 系统总体框图
电磁炮模块电路如图3所示,其中MCU_launch网络节点为单片机控制信号输入端,MCU_vdetect为电容电压监测端,在MCU_vdetect引脚接收到有效电平,即LED0亮起时才允许发射.

图3 电磁炮子系统电路设计
图3所示电磁炮驱动电路中包含4个部分,每个部分在图中分别被虚线框标出,每个部分的原理和作用分别为:
电磁炮发射机构主体部分电路中,ZVS升压模块可将输入12 V电压升高至最多450 V,且输入与输出端口的负极在内部相连,输出端口正极有二极管防止电流倒灌,电路工作时,先是充电过程,晶体管Q2打开,Q1关闭,电容C2充电,C2充电至预设电压后,打开Q1,关Q2(晶闸管Q1本身不具备可关闭性,需要令其上电流为零才能恢复关断状态,故需断开充电电路)C2经发射线圈L1放电,发射炮弹。
发射控制部分电路中,70TPS16为控制电容放电,驱动线圈的晶闸管,该电路配备了两组并联的开关电路(分别为手动控制和单片机控制)为晶闸管提供启动信号,查阅数据手册可知该型号晶闸管启动电流为100 mA,故使用PNP型三级管为其提供启动电压,并使用光电耦合管对输入信号进行隔离,手动控制部分除开关外,另有一个二极管和一个电容用于储存一定电荷,保证整体电路断电后,仍能使用开关将电容内残余电量放出,以防触电。
晶闸管关断电路功能为:放电瞬间,晶闸管Q1导通,Q1的2号引脚电压降为0,二极管D导通,从而使三级管Q4导通输出高电平,使得Q5导通,输出低电平,关断MOS管Q2,ZVS不再供电,电容器C2电流经过回路C2,Q1,L1被放出直至电流降低至100 mA以下,C2正负极电压降到很低(具体数值不稳定,但通常小于8 V),从而关断Q1,Q1关断后,2点电压上升,但上升至接近12 V时,Q2重新被导通(不是完全导通),使电容C2负极电压下降,电流经由R5,D1,L1,C2,Q2构成的回路对电容持续充电,C2电压逐渐降至0,在C2负极电压降为0之前,Q2始终工作在线性区,电压逐渐下降,此过程2点电压,始终保持恰好使Q5导通的程度,由于此过程经过了两级放大,可以认为2点的电压恒定为10.6 V,充电电流始终为0.7 mA,C2降为0后,电容继续充电,其正极电压上升,导致2点电压上升,Q5进入稳定导通状态,故一次放电之后需要经过3秒左右的时间才能进行第二次充电,起到了保护ZVS模块的效果,这个过程无需单片机进行控制,保证电路不会因单片机程序错误导致模块被烧坏,理论上首次上电需要的时间会长达15 s左右,但由于ZVS内部存在从输入直接流向输出端的单向回路,实测上电时间远小于理论值,大约7到8秒,值得注意的是,二极管D1反向耐压值不应小于500 V,本设计中使用了1N5408,耐压值为1 000 V。
在电容电压指示部分,电容电压经R1,R3分压后与电位器产生的参考电压进行比较,输出信号接指示灯并经过光耦输出给单片机,使用时应确保将单片机对应引脚配置为上拉输入,在电容电压足够高时,LED亮起,同时单片机收到电磁炮子电路的低电平信号。
2.2 系统的其他部分设计
本装置基于龙邱科技K66核心板设计了一个主控板,该款单片机接口丰富,主频较高,适用于本设计,但不是唯一选择。单片机与装置其他电路模块的连接分别为:单片机与OPENMV,TFmini和CDS5500舵机之间使用串口通信,单片机控制电磁炮发射使用2个通用IO接口,与矩阵键盘间通信使用了8个通用IO接口,与LCD屏幕间使用SPI协议通信。可以使用任何一款包含以上接口的单片机来替代,故不做详细说明。
本装置中使用的传感器包括OPENMV摄像头模块和TFmini激光传感器两部分,OPENMV是一个开源的嵌入式机器视觉平台,可以通过编写代码来实现简单的图像识别等功能,同时具有丰富的接口,方便与嵌入式设备进行通信,本实验装置使用该模块进行标靶方向的识别,TFmini激光传感器是一个红外激光测距传感器,本设计中使用该模块进行标靶的距离测量。
本实验装置主体部分为一个由CDS5500舵机驱动的2轴云台,该舵机具有总线式控制,内置角度闭环,精度高等特点,便于提高电磁炮的瞄准精度。本装置还包含了一个12键的矩阵键盘用于输入控制参数,修改运行状态等功能,同时配备一个3.5寸LCD屏用于显示当前工作模式和输入参数等交互信息。
3 系统的软件设计
3.1 控制算法的设计
3.1.1 仰角的控制
仰角和发射炮弹距离成二次函数关系,因此根据设定的发射炮弹距离就可以反解出仰角,然后单片机控制云台上的竖直方向的CDS5500舵机达到设定的仰角。
电磁炮在固定仰角下,炮弹的仰角是斜抛运动,但是不同仰角下炮弹的射出初始位置不同。故对仰角和炮弹的落地点的拟合函数并不是简单的斜抛函数。首先采集了200~310 cm范围内一些有关仰角和距离的数据,分别进行了分段线性拟合和分段二次多项式拟合。本文采用相邻两点进行分段线性拟合(图4),第一段函数表达式y=4.5x+138.5,其余各段函数表达式限于篇幅不再列出。对于分段二次多项式拟合,本文采用每相邻3个点进行了分段二次多项式拟合(图5),第一段的拟合的二次项函数式为y=2x2-49.5x+502,其余各段函数表达式限于篇幅不再列出。

图4 相邻两点进行分段线性拟合

图5 每相邻三个点分段二次多项式拟合
在此选取了202.5 cm、207.5 cm等几十个点进行实验验证,将他们的偏差记录下来取平均值,分段二次多项式偏差平均值为0.3 cm,分段线性拟合偏差平均值为1 cm,我们认为在射程200~310 cm分段二次多项式效果最好,因此采用分段二次多项式拟合。
3.1.2 水平方向角控制
手动模式下,人工输入水平方向角,单片机控制云台上的水平方向的CDS5500舵机达到设定的水平方向角。自动模式下,当电磁炮处于往复转动模式时,水平方向角设定为-30°~30°范围;当电磁炮不处于往复转动模式时,OPENMV摄像头会识别标靶的位置,并通过串口通信将数据发回给单片机,由于摄像头图像中心和电磁炮炮筒位置在竖直方向上是在一条直线上,因此当云台转动到标靶正好位于OPENMV图像中心时,电磁炮停止转动。通过PID控制舵机实现云台精确转动到标靶位于OPENMV图像中心。
3.2 程序设计流程图
模块化设计,实验装置上电工作后,首先对传感器进行初始化,通过拨码开关切换各种模式,然后根据选中模式执行相应的动作。程序设计流程如图6所示。
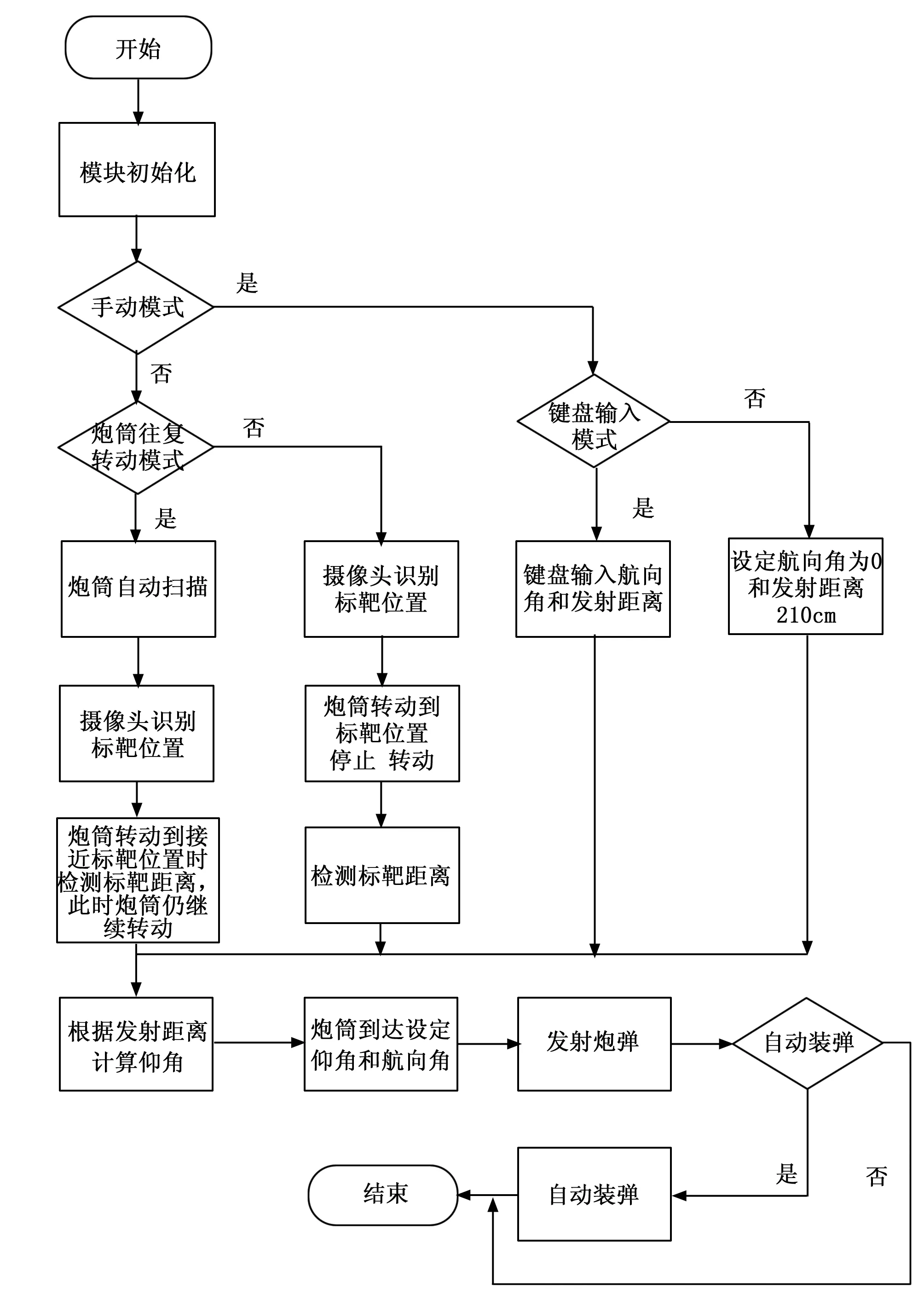
图6 程序设计流程图
4 测试与验证
4.1 测试步骤
1)电磁炮发射距离精度测试步骤:
电磁炮模式选择为模式1,发射炮弹,记录数据。
2)电磁炮打靶测试步骤:
电磁炮模式分别选择为模式3和模式4,射击标靶,记录数据。
3)电磁炮射程测试步骤:
电磁炮模式选择为模式2,手动设定电磁炮电压和仰角,测量射击距离,记录数据。
4.2 测试结果及分析
由表1可知,电磁炮发射距离偏差均值为1.125 cm,可以看出发射距离精度较高。

表1 电磁炮发射距离测试结果
由表2可知,电磁炮打靶平均偏差为0.125环,可见电磁炮打靶精度较高。

表2 电磁炮打靶测试结果
由表3的测试数据可以看出,电磁炮最远射程超过3 m,实物如图7所示。由此可见,该装置电磁炮充放电系统工作正常,射程也满足设计要求。

表3 电磁炮射程测试结果

图7 实物装置
综上所述,该系统射击精度较高,并且能够通过调整电压调整射程范围,满足电磁炮实验装置的设计要求。但是本电磁炮实验装置具有一些缺陷,比如TFmini传感器精度为cm级传感器,检测距离存在误差,可以通过更换更高精度的激光传感器减小检测误差。
5 结束语
本文设计了一种电磁曲射炮实验装置。结合TFmini传感器距离测量信息和通过OPENMV摄像头提供的视觉信息,精确控制水平方向角和仰角,可以实现手动和自动瞄准,实现规定距离的发射和精准打击功能。从设计过程和实物装置测试的结果来看,适合应用于实验教学,具有一定的推广价值。当然,本系统还有进一步的改进空间,适当的延长炮筒,增加线圈级数[10,13,18],附加多极磁场组成线圈-多级场混合发射系统[11]和设计精准的充放电控制过程[12],使用串联电容组[14]和高压直流转换器[15]通过升压方式提高电磁炮发射初速度[16]可以实现更远距离的自动瞄准射击。未来此装置如果装在巡检机器人上,可以实现定点作业等功能,更能拓展其应用场景。
猜你喜欢
红蜻蜓(2022年4期)2022-05-13
初中生世界·九年级(2020年2期)2020-04-10
环球时报(2020-02-21)2020-02-21
作文大王·低年级(2019年2期)2019-01-23
学苑创造·A版(2016年9期)2016-10-10
科技视界(2016年15期)2016-06-30
知识就是力量(2016年6期)2016-05-31
中学生数理化·高二版(2016年5期)2016-05-14
微型计算机(2010年10期)2010-09-09
红领巾·成长(2009年8期)2009-01-12