基于MLP模型和模糊控制的盆栽灌溉系统
2021-10-08 00:46邓力元刘桂波户秋月顾洁琼刘衍斌
计算机时代 2021年9期
邓力元 刘桂波 户秋月 顾洁琼 刘衍斌
摘 要: 不同的植物、土壤和花盆下的盆栽环境具有不一样的特性,故难以使用一套恒定不变的控制算法来实现不同盆栽环境下的精准灌溉需求。文章结合当今农业灌溉系统的实现方法和经验,设计并实现一种基于MLP模型和模糊控制的自动灌溉算法,针对实地盆栽环境,可调节控制系统参数以适应在不同盆栽环境下的精准灌溉需求。实验表明,该控制系统能够自适应盆栽环境的特性,灌溉后的实际土壤湿度值与预期值偏差小。
关键词: MLP模型; 模糊控制; 精准灌溉; 自适应; 盆栽系统
中图分类号:TP273+.2;S24 文献标识码:A 文章编号:1006-8228(2021)09-34-05
Abstract: Different plants, soils and potted environments have different characteristics, so it is difficult to use a set of constant control algorithm to realize the requirement for precise irrigation in different potted environments. Combined with the implementation method and experience of present agricultural irrigation system, this paper designs and realizes an automatic irrigation algorithm based on MLP model and fuzzy control. According to the field potted environment, the parameters of the control system can be adjusted to meet the precise irrigation requirements in different potted environments. The experiment shows that the control system can adapt to the characteristics of potted environment, and the deviation between the actual soil moisture value after irrigation and the expected value is small.
Key words: MLP model; fuzzy control; precise irrigation; adaptive; potted system
0 引言
智能盆栽作为智能家居的新宠,从技术范畴上属于精准农业的一个技术分支,是现代化农业管理策略和农业操作技术的一种[1],精准灌溉逐渐成为规模化盆栽种植中的灌溉要求。而在当今市场所售的盆栽自动灌溉器中,大多仍采用阈值检测或定时灌溉的方式,一些学者也对盆栽灌溉方案進行研究,包括预测用水量和智能灌溉控制等[2-4],但不同的盆栽环境具有不一样的特性,恒定的灌溉方案并不能满足不同盆栽环境下的精准灌溉需求。因此,制定一个既能保持精准灌溉,又能根据实地盆栽环境调节控制参数的灌溉系统,势在必行。
在农业灌溉技术中,模糊控制作为应用比较广泛的方法之一,近年来灌溉技术的不断发展,又产生了各类技术结合模糊控制的灌溉方案。杨昊[5]设计了基于BP神经网络和模糊控制的智能灌溉系统,李嵩等[6]设计了基于PSO优化Fuzzy_PID的精量水肥灌溉机,刘斌等[7]设计了基于Smith预估模糊控制的温室灌溉系统,冯兆宇等[8]设计了基于灰色神经网络与模糊控制的寒地水稻灌溉系统。以上系统结合了实地应用作物环境的特点,针对进行了算法设计与改进,解决了灌溉过程中的不确定性与时滞性,实现精准灌溉的要求。本文结合以上研究成果的经验,设计一种基于模糊控制并能够实时调节自身控制参数的灌溉算法,在保证精准灌溉的基础上,同时能够适应不同的实地盆栽环境。
1 灌溉系统软件设计
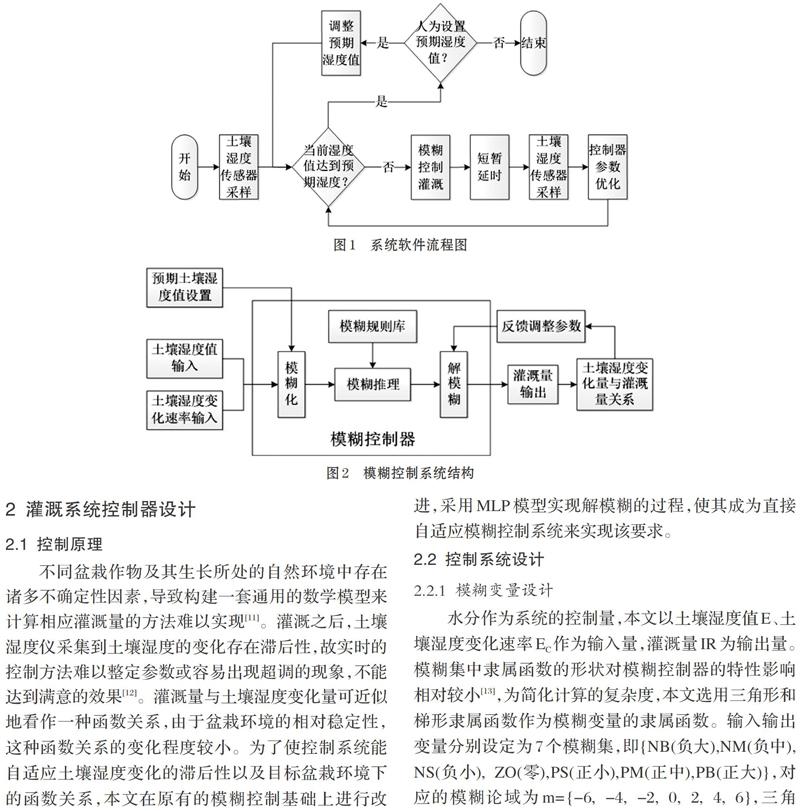
盆栽作物的生长受光照强度、温湿度、土壤含水率等环境因素的影响,其中土壤含水率能够直接影响到作物生长[9]。本文主要研究土壤含水率对作物生长的影响,灌溉系统通过传感器采集的土壤湿度值,计算出土壤湿度变化速率,根据模糊规则推理出相应的灌溉量,并在每轮灌溉结束后,优化模糊控制器的控制参数。系统软件流程图如图1所示。
本模糊控制系统为双输入单输出的模糊控制系统,以土壤湿度、土壤湿度变化速率作为输入量,灌溉量作为输出量[10]。系统通过土壤湿度实际变化值反馈于模糊控制器,调整模糊化过程中的控制参数,进而增大或减小指定土壤湿度变化值所需的灌溉量,适应当前盆栽环境下,灌溉量与对应的土壤湿度变化量的特点。模糊控制系统总体结构如图2所示。
2 灌溉系统控制器设计
2.1 控制原理
不同盆栽作物及其生长所处的自然环境中存在诸多不确定性因素,导致构建一套通用的数学模型来计算相应灌溉量的方法难以实现[11]。灌溉之后,土壤湿度仪采集到土壤湿度的变化存在滞后性,故实时的控制方法难以整定参数或容易出现超调的现象,不能达到满意的效果[12]。灌溉量与土壤湿度变化量可近似地看作一种函数关系,由于盆栽环境的相对稳定性,这种函数关系的变化程度较小。为了使控制系统能自适应土壤湿度变化的滞后性以及目标盆栽环境下的函数关系,本文在原有的模糊控制基础上进行改进,采用MLP模型实现解模糊的过程,使其成为直接自适应模糊控制系统来实现该要求。
2.2 控制系统设计
2.2.1 模糊变量设计
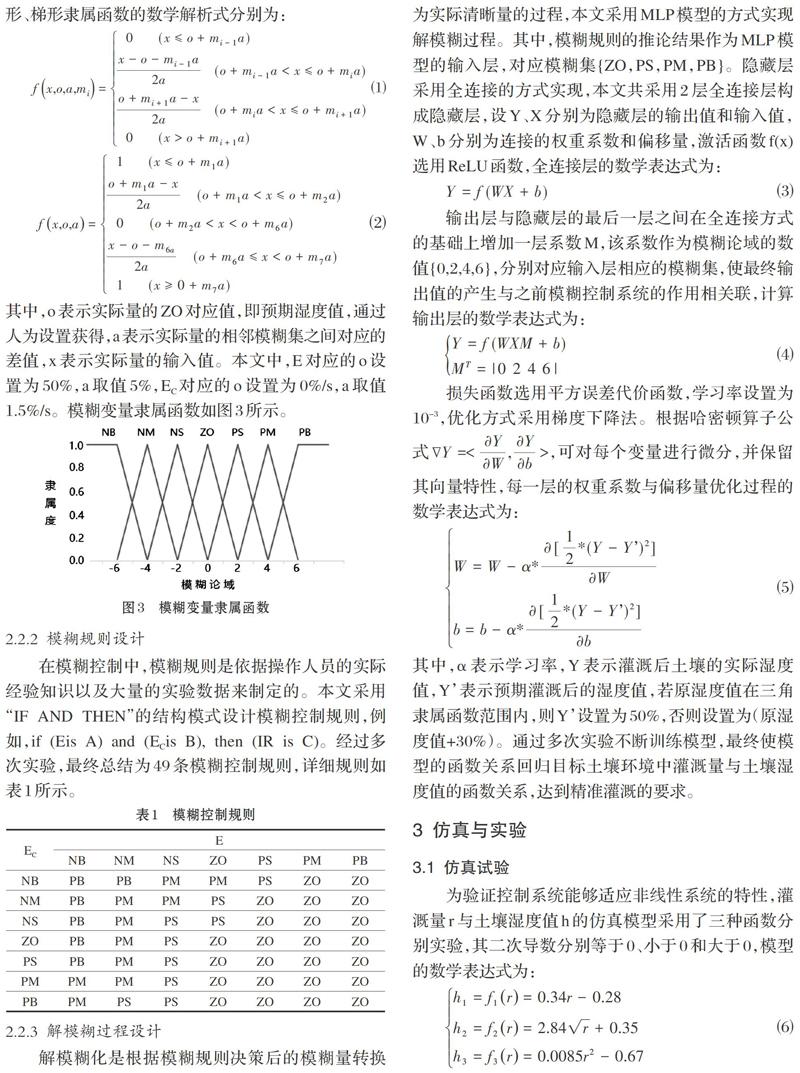
水分作为系统的控制量,本文以土壤湿度值E、土壤湿度变化速率EC作为输入量,灌溉量IR为输出量。模糊集中隶属函数的形状对模糊控制器的特性影响相对较小[13],为简化计算的复杂度,本文选用三角形和梯形隶属函数作为模糊变量的隶属函数。输入输出变量分别设定为7个模糊集,即{NB(负大),NM(负中),NS(负小), ZO(零),PS(正小),PM(正中),PB(正大)},对应的模糊论域为m={-6, -4, -2, 0, 2, 4, 6},三角形、梯形隶属函数的数学解析式分别为:
其中,o表示实际量的ZO对应值,即预期湿度值,通过人为设置获得,a表示实际量的相邻模糊集之间对应的差值,x表示实际量的输入值。本文中,E对应的o设置为50%,a取值5%,EC对应的o设置为0%/s,a取值1.5%/s。模糊变量隶属函数如图3所示。
2.2.2 模糊规则设计
在模糊控制中,模糊规则是依据操作人员的实际经验知识以及大量的实验数据来制定的。本文采用“IF AND THEN”的结构模式设计模糊控制规则,例如,if (Eis A) and (ECis B), then (IR is C)。经过多次实验,最终总结为49条模糊控制规则,详细规则如表1所示。
2.2.3 解模糊过程设计
解模糊化是根据模糊规则决策后的模糊量转换为实际清晰量的过程,本文采用MLP模型的方式实现解模糊过程。其中,模糊规则的推论结果作为MLP模型的输入层,对应模糊集{ZO,PS,PM,PB}。隐藏层采用全连接的方式实现,本文共采用2层全连接层构成隐藏层,设Y、X分别为隐藏层的输出值和输入值,W、b分别为连接的权重系数和偏移量,激活函数f(x)选用ReLU函数,全连接层的数学表达式为:
输出层与隐藏层的最后一层之间在全连接方式的基础上增加一层系数M,该系数作为模糊论域的数值{0,2,4,6},分别对应输入层相应的模糊集,使最终输出值的产生与之前模糊控制系统的作用相关联,计算输出层的数学表达式为:
损失函数选用平方误差代价函数,学习率设置为10-3,优化方式采用梯度下降法。根据哈密顿算子公式[?Y=],可对每个变量进行微分,并保留其向量特性,每一层的权重系数与偏移量优化过程的数学表达式为:
其中,α表示学习率,Y表示灌溉后土壤的实际湿度值,Y表示预期灌溉后的湿度值,若原湿度值在三角隶属函数范围内,则Y设置为50%,否则设置为(原湿度值+30%)。通过多次实验不断训练模型,最终使模型的函数关系回归目标土壤环境中灌溉量与土壤湿度值的函数关系,达到精准灌溉的要求。
3 仿真与实验
3.1 仿真试验
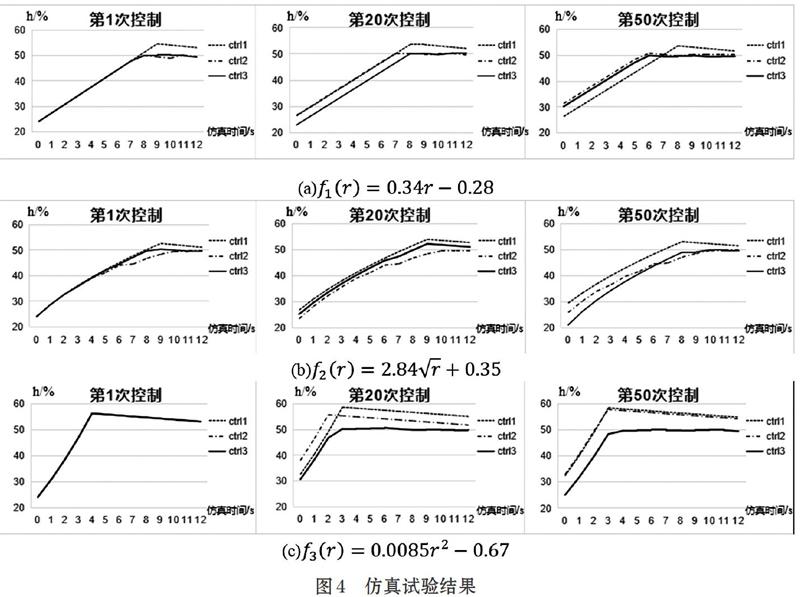
为验证控制系统能够适应非线性系统的特性,灌溉量r与土壤湿度值h的仿真模型采用了三种函数分别实验,其二次导数分别等于0、小于0和大于0,模型的数学表达式为:
设置计算范围为[0,100],初始值取值范围为[20,33],为模拟土壤湿度变化的滞后性,将原传入給控制系统的土壤湿度值减3后再传入。仿真试验采用阈值控制ctrl1、模糊控制ctrl2、结合MLP模型的模糊控制ctrl3三种控制方式实现。其中,ctrl2与ctrl3的模糊控制部分的控制方式及参数一致,只是ctrl2的解模糊过程采用了传统的面积重心法实现,且并不存在反馈调节控制参数的机制。仿真试验以迭代控制50次为一组,试验结果如图4所示。
仿真结果显示,阈值检测的控制方式在所有仿真模型中均有明显的超调现象,可知阈值检测这类实时性的控制方式不能适应土壤灌溉这种滞后性较强的系统。对于ctrl2和ctrl3,在三种仿真模型中二者控制效果最初没明显差距,但在图(b)第50次控制中,ctrl3完成控制的时间少于ctrl2,以及在图(c)中第20次控制开始后,ctrl3随着控制次数的增加逐渐减弱并消除了超调的现象,而ctrl2的方式仍存在超调。
由图(b)(c)可知,ctrl3控制方式能够适应[f''r>0]和[f''r<0]的被测模型,根据反馈调整控制系统的参数,增大或减小单次控制的输出量,使得每轮试验中减少控制算法的调用次数或降低超调的现象,保证较高的精度。
3.2 实验结果
为验证系统的有效性,本文搭建模型进行实地实验。硬件主控芯片采用STM32F103C8T6微控制器,土壤湿度传感器选取大连祺峰科技有限公司的SMTS-II-100传感器,水泵采用直流电机水泵,花盆直径6cm、高5.8cm,土壤类型为砂质土,STM32通过MAX485并基于Modbus协议获取传感器数据。
恒定水泵的灌溉速率,通过改变灌溉时间得到不同的灌溉值,土壤湿度传感器采集数据间隔时间为1s,目标湿度值设置为50%,允许误差设置为1%,即当实际湿度值达到49%以上时结束灌溉。通过多次灌溉实验,记录土壤湿度传感器采集的湿度值,分析土壤湿度变化值和灌溉量,验证控制系统的性能。实验数据如表2所示,系统性能数据如表3所示。
由表2、表3可知,基于MLP模型和模糊控制器的控制系统,能够在每轮灌溉结束后优化自身的控制参数,使得下一轮的控制结果更加接近于目标湿度值,并缩短控制所需时间。其中第三轮控制中湿度值变化有起伏现象,是湿度值变化的滞后性和二次调用控制算法造成的结果。每轮控制的优化比例均在17.9%左右,即系统模型具有稳定性,符合仿真结果的特性。
4 总结
通过计算机仿真和实验操作表明,基于MLP模型和模糊控制的灌溉系统能够对盆栽灌溉进行有效控制,根据每次灌溉的结果优化自身的控制参数,直至将灌溉量控制在能够达到预期湿度值的数值,湿度误差值小。整个控制过程无需构建相关数学模型,适应盆栽市场中用户盆栽环境各不相同,从而难以数学建模、系统控制参数不同的特点。经实验证实,该系统模型满足实际所需要求。
参考文献(References):
[1] 张娜.智能花盆技术的研究[D].吉林农业大学,2016:9-12
[2] 李玲,熊晓芸,王金龙,等.基于时间序列分析的盆栽浇灌智能系统[J].计算机应用,2014.34(S1):120-123
[3] 李松敏,王仰仁,张辉.盆栽负压灌溉供水规律与效果的试验研究[J].节水灌溉,2016.3:21-23
[4] 邓健志,程小辉.智能盆栽浇灌装置的设计[J].农机化研究,2012.34(5):143-146
[5] 杨昊.基于BP神经网络和模糊控制的智能灌溉系统设计[D].安徽理工大学,2019:35-48
[6] 李嵩,周建平,许燕.基于PSO优化Fuzzy-PID精量灌溉控制系统设计[J].节水灌溉,2019.3:90-93
[7] 刘斌,谢煜,孙艺哲等.基于Smith预估模糊控制的温室灌溉决策系统设计[J].中国农机化学报,2019.40(8):149-153
[8] 冯兆宇,崔天时,张志超等.基于灰色神经网络与模糊控制的寒地水稻灌溉制度[J].灌溉排水学报,2018.37(4):71-79
[9] 王楚.影响多肉植物生长着色环境因素分析[J].农家参谋,2019.1:97
[10] 董玮.基于Qt精准灌溉系统的设计与实现[D].北京林业大学,2018:33-34
[11] 匡迎春,沈岳,段建南等.模糊控制在水稻节水自动灌溉中的应用[J].农业工程学报,2011.27(4):18-21
[12] 刘洪静,李黎,高金辉.基于模糊PID控制的节水灌溉智能控制系统设计[J].节水灌溉,2020.2:88-91,95
[13] 谢家兴,高鹏,莫昊凡等.荔枝园智能灌溉决策系统模糊控制器设计与优化[J].农业机械学报,2018.49(8):26-32,58
猜你喜欢
中国教育信息化·基础教育(2016年11期)2016-12-27
软件导刊(2016年11期)2016-12-22
科技视界(2016年26期)2016-12-17
科教导刊·电子版(2016年26期)2016-11-21
汽车科技(2016年5期)2016-11-14
中国新通信(2016年16期)2016-10-18
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
西北工业大学学报(2015年1期)2016-01-19