陀螺全站仪定向计算方法 在隧道贯通测量中的应用
2021-10-21 19:56王露李涛郭千楠
水利水电快报 2021年10期
关键词:工程测量
王露 李涛 郭千楠

摘要:为了提高陀螺全站仪在隧道贯通测量中的测量精度,在传统陀螺仪隧道贯通测量方法的基础上,提出了在隧道出口已知边加测陀螺方位角,得出隧道内待定边方位角取平均的测量方法。使用GYROMAT 3000陀螺全站仪进行工程实际验证,分析了用取平均法进行陀螺全站仪定向计算的精度。结果表明:取平均法与传统方法计算的定向精度分别为±2.9″和±4.1″,分析认为主要误差来源是陀螺仪本身的定向误差和子午线收敛角的计算误差,取平均法精度较高,较传统方法提高了30%。
关键词:隧道贯通;工程测量;陀螺定向;坐标方位角;子午线收敛角;取平均法
中图法分类号:U452.1文献标志码:ADOI:10.15974/j.cnki.slsdkb.2021.10.008
文章编号:1006 - 0081(2021)10 - 0043 - 04
0 引 言
隧道工程贯通测量是为了获取实际的贯通误差值,为下一步调整施工中线提供依据而进行的测量。联系测量是隧道贯通测量的重难点,几何法是经典的平面联系测量方法,利用悬挂钢丝垂线由地面向地下传递平面坐标和方向,随着科技进步与发展,陀螺全站仪定向法逐渐成为现代地下工程联系测量的主要方法之一,通过测量陀螺方位角,将地面已知边坐标方位角传入井下,以指导井下测量工作[1]。
目前陀螺全站仪采用传统的“4-6-4”的观测模式,计算洞内待定边的坐标方位角,必要时,加入子午线收敛角的改正。本文采取在进洞口处已知边观测4个测回,进入隧道内待定边观测6个测回,最后在出洞口已知边观测6个测回。进洞口4个测回取平均求出进洞口已知点的仪器常数,出洞口6个测回取平均求出仪器常数。在传统陀螺仪隧道贯通测量方法的基础上,提出了在隧道出口已知边加测陀螺方位角,得出隧道内待定边方位角取平均的测量方法[2]。
1 陀螺全站仪贯通测量计算方法
1.1 传统方法
传统的陀螺全站仪隧道贯通测量采用“4-6-4”的观测模式,在进口处的已知边上观测4个测回,计算仪器常数;进入隧道内部待定边观测6个测回,再回到洞口已知边上观测4个测回[3],计算仪器常数,并与第一次观测的4个测回获得的仪器常数取平均值作为计算坐标方位角的仪器常数[Δ],根据式(1)计算坐标方位角α[4]。
[α=αT+Δ-γ=αT-γ+α0+γ0-αT0]
[=αT+α0-αT0+δy] (1)
[δy=γ0-γ] (2)
式中:[αT]為在待定边上测定的陀螺方位角;[Δ]为仪器常数;[γ]为子午线收敛角;[γ0]为陀螺安置点的子午线收敛角;[α0]为测线方向的坐标方位角;[αT0]为地面已知边上的陀螺方位角;[δy]为定向边子午线收敛角与待测边子午线收敛角之间的较差。以上参数单位均为度分秒。
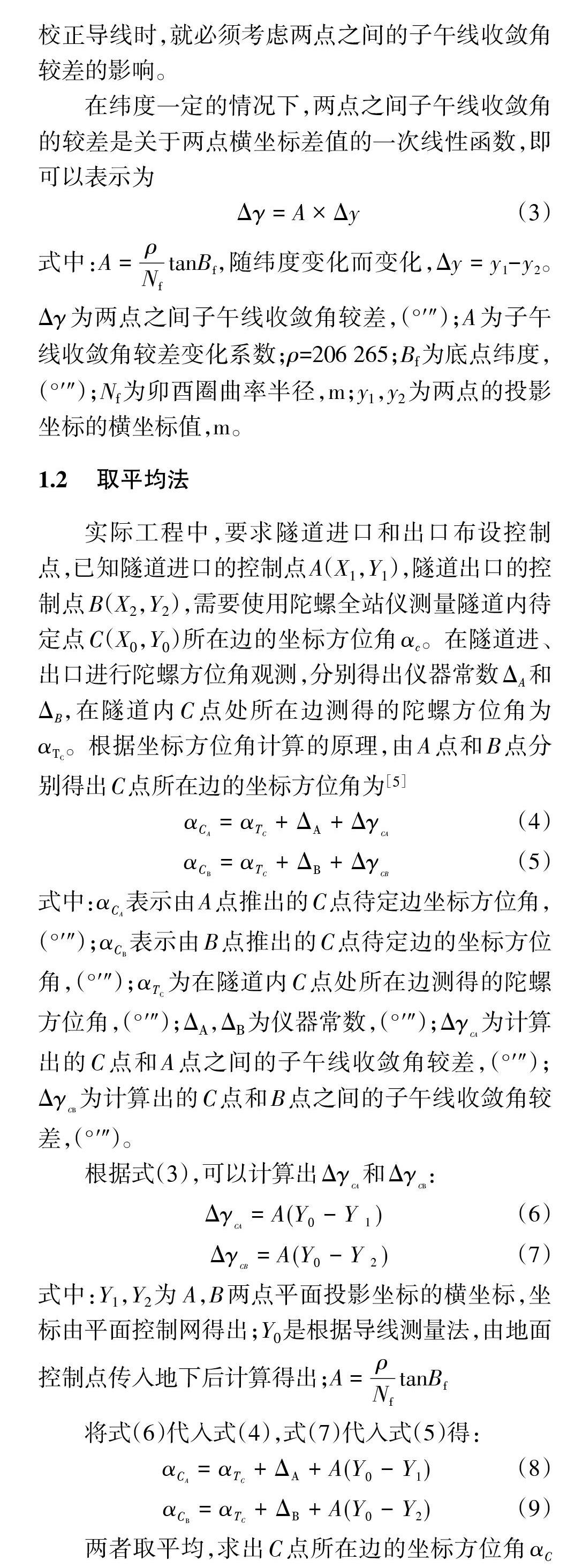
对于高精度的地下工程来说,在进行陀螺定向校正导线时,就必须考虑两点之间的子午线收敛角较差的影响。
在纬度一定的情况下,两点之间子午线收敛角的较差是关于两点横坐标差值的一次线性函数,即可以表示为
[Δγ=A×Δy] (3)
式中:[A=ρNftanBf],随纬度变化而变化,[Δy=y1][-y2]。[Δγ]为两点之间子午线收敛角较差,(°′″);A为子午线收敛角较差变化系数;[ρ]=206 265;Bf为底点纬度,(°′″);Nf为卯酉圈曲率半径,m;y1,y2为两点的投影坐标的横坐标值,m。
1.2取平均法
实际工程中,要求隧道进口和出口布设控制点,已知隧道进口的控制点A(X1,Y1),隧道出口的控制点B(X2,Y2),需要使用陀螺全站仪测量隧道内待定点C(X0,Y0)所在边的坐标方位角[αc]。在隧道进、出口进行陀螺方位角观测,分别得出仪器常数[ΔA]和[ΔB],在隧道内C点处所在边测得的陀螺方位角为[αTC]。根据坐标方位角计算的原理,由A点和B点分别得出C点所在边的坐标方位角为[5]
[αCA=αTC+ΔA+ΔγCA] (4)
[αCB=αTC+ΔB+ΔγCB] (5)
式中:[αCA]表示由A点推出的C点待定边坐标方位角,(°′″);[αCB]表示由B点推出的C点待定边的坐标方位角,(°′″);[αTC]为在隧道内C点处所在边测得的陀螺方位角,(°′″);ΔA,ΔB为仪器常数,(°′″);[ΔγCA]为计算出的C点和A点之间的子午线收敛角较差,(°′″);[ΔγCB]为计算出的C点和B点之间的子午线收敛角较差,(°′″)。
根据式(3),可以计算出[ΔγCA]和[ΔγCB]:
[ΔγCA=A(Y0-Y1)] (6)
[ΔγCB=A(Y0-Y2)] (7)
式中:Y1,Y2为 A,B两点平面投影坐标的横坐标,坐标由平面控制网得出;Y0是根据导线测量法,由地面控制点传入地下后计算得出;[A=ρNftanBf]
将式(6)代入式(4),式(7)代入式(5)得:
[αCA=αTC+ΔA+A(Y0-Y1)] (8)
[αCB=αTC+ΔB+A(Y0-Y2)] (9)
兩者取平均,求出C点所在边的坐标方位角[αC]为
[αC=12(αCA+αCB)] (10)
式(10)是从两端分别计算隧道内待定点所在边的坐标方位角再取平均求得。在计算过程中,通过计算子午线收敛角的较差来代替传统计算中直接计算待定点处的子午线收敛角[6]。为便于计算,两点间较差通过省略高次项的简便计算得出。采用计算机编程分析得出,两点间子午线收敛角较差的计算精度在0.01″~0.65″,满足于实际工程计算的需要。理论上,由此计算出的坐标方位角与实测出的坐标方位角之间只存在一定的计算误差,符合实际工程需要。
2 应用实例
南京市和燕路过江通道(南段)工程位于长江大桥和长江二桥之间。项目选址于南京市栖霞区燕子矶和八卦洲街道,起于栖霞区燕恒路与和燕路的交叉口,向北顺和燕路穿越长江,在八卦洲上与浦仪公路交叉后止于浦仪公路八卦洲西枢纽,该项目是典型的地下隧道工程。根据工程特点,和燕路盾构隧道采用直接传递法联系测量传递确定地下点位和方向[7]。隧道进口如图1所示,出口如图2所示。
盾构机从江北始发,当盾构机推进到C点处,推进的长度约为600 m,D处推进的长度为800 m,布设的导线如图3所示。
图3中,用导线测量仪器Leica TM50进行地下导线测量,观测6个测回,经过严密的平差计算得出C-D边的坐标方位角141°36′10.9″,方向中误差3″,使用陀螺全站仪检测C-D边的坐标方位角。已知点坐标见表1。
在隧道的进口A点和出口B点进行陀螺全站仪定向观测。在江北侧,陀螺全站仪架在A点,照准E点,进行4个测回的定向观测,待隧道内待定边观测结束后回到进洞口继续观测4个测回。在江南侧,陀螺全站仪架在B点,照准F方向,进行6个测回的定向观测。在隧道内,陀螺全站仪架在C点,照准D点,进行6个测回定向观测。江北、江南侧观测结果和待检核的隧道内待定边C-D陀螺定向观测结果见表2。
全自动陀螺全站仪1个测回获得1个方位角数据,1个测站需连续进行4~6个测回的测量,将多个测回的平均值作为该方向陀螺方位角平均值的定值。正常一个测回15 min左右,每测站4~6个测回,需要预留90~120 min,在测量中不能有任何震动干扰,1个测回出问题,就需要测站全部重测,而在实际定向测量中,测站难免重测1~2次。为防止震动干扰,在实际测量中,需要施工单位停工、围挡配合进行。
3成果分析
3.1 传统方法
由传统的观测方法“4-6-4”,在地面江北侧已知边观测4个测回,地下待定边观测6个测回,再回到地面观测4个测回,其中需要计算出点A和C之间的子午线收敛角较差,两点间的较差可由式(3)得出,过江隧道所处的纬度大约为北纬32°9′49.68″,因此可以算出式(3)中的常数A,[ρ]取206 265,椭球参数采用2000国家大地坐标系的椭球参数。
式(3)即可转化为
[Δγ=0.02×Δy], [ΔγCA=] 12.7″,
[αTC=]141°31′50.9″,[ΔA=]4′16.6″,
[αC=αTC+ΔA+ΔγCA=]141°36′20.2″。
运用传统方法计算时,已知点所在边的坐标方位角通常通过布设控制网得出,误差在1″左右;经分析可知,子午线收敛角的计算精度在0.01″~0.65″,此处取最不利的子午线收敛角的计算精度为 0.65″;由传统方法得到的待定点所在边的坐标方位角的中误差为[mαC]。
[mαC=±mαTC2+mγ2+mαA2+mαTA2=±]4.1″
3.2 取平均法
由式(10)计算C点处的陀螺方位角:根据两点间的子午线收敛角的较差,见式(3),可计算出A和C,B和C之间的子午线收敛角的较差。
[ΔγCA]= 12.7″,[ΔγCB]= -22.6″,[ΔA]=4′16.6″,
[ΔB]=4′50.1″,[αTC]=141°31′50.9″
那么可以计算出:
[αCA=αTC+ΔA+ΔγCA=]141°36′20.2″,
[αCB=αTC+ΔB+ΔγCB=]141°36′18.4″
将两式计算结果取平均得出:
[αC=12(αCA+αCB)=]141°36′19.3″
取平均法相对于传统的计算方法,相当于在隧道出口加测了一次陀螺方位角,传统方法求得的坐标方位角中误差为±4.1″,取平均法求得的坐标方位角的中误差[mαC]为
[mαC=12mαCA2+mαCB2=]±2.9″
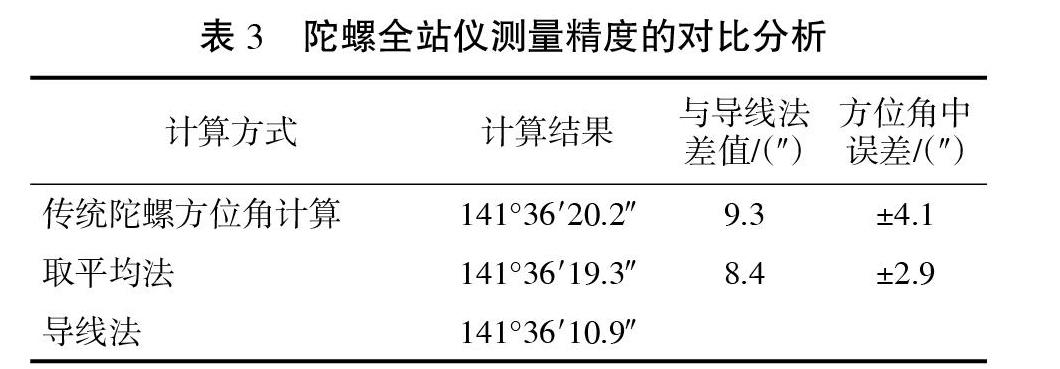
從实测计算中误差计算结果来看,取平均法比传统方法的计算精度提高了30%。陀螺全站仪测量精度的对比分析见表3。
在表3中,以导线法测量所得的方位角为参考值,分析不同的陀螺全站仪定向计算方法的精度。不同计算方法的误差影响因素不同,而应用陀螺全站仪定向计算方法的误差主要来源于陀螺全站仪定向误差和子午线收敛角较差的计算误差。从中误差计算结果分析,取平均法的精度较传统方法的精度高。
针对和燕路隧道贯通的要求和实际情况,隧道横向贯通误差要求为50 mm,隧道盾构区间长度为2 580 m,由长度和横向贯通误差可以求得陀螺全站仪贯通测量的角度限差为±4″,取平均法的精度高,为±2.9″,达到实际工程的要求。基于使用GYROMT3000陀螺全站仪的情况下,可以采用取平均法,以达到提高精度、简化计算的目的,也能保证隧道的顺利贯通。
4 结 语
本文结合和燕路过江通道的实际情况进行陀螺定向实验。由实测结果可知,传统方法和取平均法的计算结果与导线测量法的互差均在10″以内,两种方法之间的角度互差为0.9″。影响误差的因素较为复杂,其中大多是陀螺全站仪定向误差和子午线收敛角的计算误差。从中误差计算结果来看,取平均法可以准确计算出隧道内任一待定点所在边的坐标方位角,计算精度满足工程要求,相对于传统方法计算精度提高了30%。
参考文献:
[1] 周凌焱,刘成龙,高洪涛. 高铁隧道洞内控制网测量新方法的应用[J]. 测绘科学技术学报,2014,31(6):570-575.
[2] 牛海鹏,谭志祥,邓喀中,等. 地下工程测量横向贯通误差处理方法研究[J]. 煤炭工程,2012(3):108-110,113.
[3] 时丕旭. 高精度陀螺仪在超长铁路隧道贯通误差预计中的应用研究[J]. 铁道勘察,2019,45(3):25-29.
[4] 王铁生. 地下隧洞测控技术与地表沉降动态监控模型的研究[D]. 南京:河海大学,2003.
[5] 王海蚌. 竖井联系测量中平面坐标的传递[J]. 矿产勘查,2019(9):2400-2405.
[6] 陈泽远. 隧道控制洞外横向贯通误差研究[J]. 西安科技大学学报,2014,34(4):402-407.
[7] MONAGHAN C C,RIEL W J B M ,VELTINK P H. Control of triceps surae stimulation based on shank orientation using a uniaxial gyroscope during gait[J]. Medical & Biological Engineering & Computing,2009,47(11):12-15.
(编辑:唐湘茜)
Application of gyroscope orientation calculation method in tunnel penetration survey
WANG Lu, LI Tao,GUO Qiannan
(Changjiang River Estuary Bureau of Hydrology and Water Resources Survey, Bureau of Hydrology, Changjiang Water Resources Commission,Shanghai 200136, China)
Abstract: In order to improve the measuring accuracy of gyro total station in tunnel penetrating survey, in this paper,based on the traditional gyroscopic tunnel holing-through survey method, it is suggested that a gyroscopic azimuth angle is added to the known side of the tunnel exit, and then a measurement method for averaging the azimuth angles of the undetermined sides in the tunnel will be obtained. By using GYROMAT3000 gyro total station on actual engineering, the accuracy of using averaging method for gyroscope orientation calculation is analyzed. The contrastive analysis shows that orientation accuracies calculated by the averaging method and traditional calculation method were ±2.9″and ±4.1″. The analysis believes that the main source of error is the orientation error of the gyroscope itself and the calculation error of the meridian convergence angle. Theoretically, the averaging method's accuracy is 30% higher than traditional method.
Key words: tunnel penetration; engineering survey; gyroscope orientation; coordinate azimuth; meridian convergence angle;averaging method
猜你喜欢
建筑建材装饰(2016年14期)2017-01-05
建筑建材装饰(2016年10期)2017-01-03
建筑建材装饰(2016年10期)2017-01-03
环球人文地理·评论版(2016年5期)2017-01-03
中国教育技术装备(2016年19期)2016-12-27
中国新技术新产品(2016年23期)2016-12-26
科学与财富(2016年18期)2016-12-22
科技视界(2016年6期)2016-07-12