纹理图像多尺度灰度共生矩阵步长参数的研究
2021-10-22 06:56李丽宏谢东阳潘飞扬王鹏涛
河北工程大学学报(自然科学版) 2021年3期
李丽宏,谢东阳,王 琳,潘飞扬,王鹏涛
(河北工程大学 信息与电气工程学院,河北 邯郸 056038)
纹理分析是图像分析的重要组成部分,是利用图像处理技术计算纹理特征,实现对纹理定量或定性描述的过程[1-2]。纹理特征可用于纹理的描述和分类,例如,在医学图象处理中利用纹理特性来区别正常细胞和癌细胞[3-4];在机械加工过程中,利用工件纹理特征判断刀具磨损程度[5];在洗选厂中,利用纹理信息与灰度信息对煤与矸石进行区分识别[6]。
基于灰度共生矩阵(Gray Level Co-occurrence Matrix,GLCM)的纹理特征分析技术属于一种统计分析技术,其模型是Haralick在1973年提出的用于分析图像纹理的一种数学模型[7-8]。灰度共生矩阵是建立在二阶组合条件概率密度函数基础上的,纹理图像是纹理基元在空间位置上按照一定规则排列的图像。步长参数d为两个采样像素点之间的步长,为共生矩阵计算时的重要参数,大部分研究者把步长参数d设置为1进行纹理特征研究,而步长参数d取值不同,则所得共生矩阵特征值将不同,这将导致图像分析时得到不同的分析结果,影响图像分析的精确性[9]。
针对大部分研究者把步长参数只是简单设置为1的情况,本文研究了如何根据具体纹理图像确定合适步长参数d,利用此步长参数,计算所得的共生矩阵,更适于纹理图像的描述,纹理特征参数更合理,更利于纹理的分析。
同时本文为了降低纹理分析计算量,对纹理图像首先进行小波变换,进行小波变换下采样处理图像,而非采用基本下采样处理方式,既可降低图像数据量,同时也可根据具体纹理图像,选择合适小波子图像(近似图像或某方向细节子图像)进行纹理分析,进而确定合适步长参数d,既降低了纹理分析计算量,同时提高了纹理分析精度,为进一步实现精确的、实时的纹理分析系统奠定基础。
1 相关理论知识
1.1 共生矩阵基本概念
一幅图像I,某像素坐标为(x,y),其灰度值为i,即f(x,y)=i,另一像素的坐标为(x+Δx,y+Δy),其灰度值为j,即f(x+Δx,y+Δy)=j,共生矩阵统计图像中沿某方向、相隔一定间隔步长且灰度值为(i,j)的像素对出现的次数,其可用p(i,j/d,θ)表示,其中d表示两个像素之间的步长,即共生矩阵步长参数。θ表示两个像素间的角度,通常θ取值为0°,45°,90°,135°。i,j为两像素的灰度值。共生矩阵能反映图像灰度变化情况[10]。
如果图像I有L个灰度级,归一化共生矩阵用C(i,j)表示,其维数为L×L,如式(1)所示,示意图如图1所示。
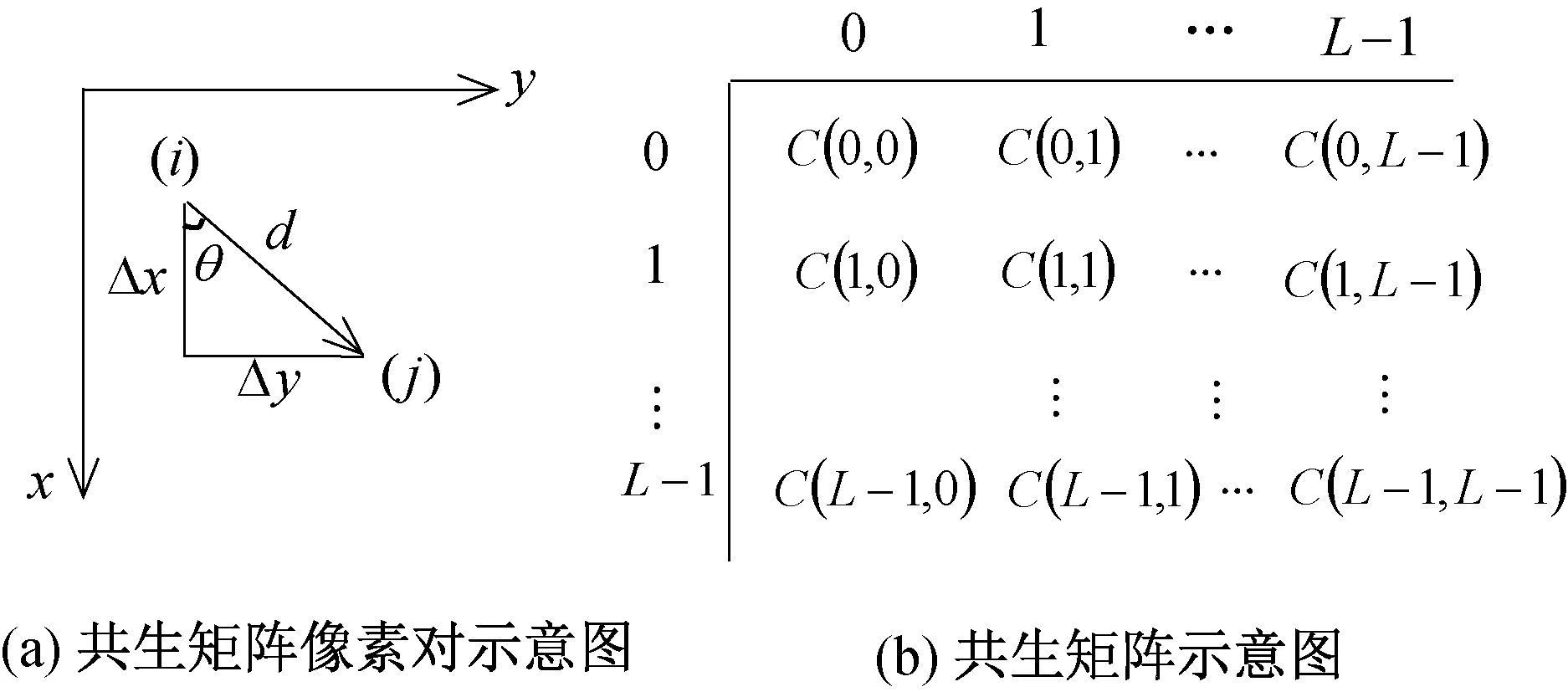
图1 共生矩阵示意图Fig.1 Schematic diagram of GLCM

(1)
1.2 共生矩阵特征参数
Haralick[7]基于共生矩阵,提出了14个纹理特征参数。对比度是其一特征参数,本文利用对比度进行图像纹理分析,其定义如式(2)所示。
(2)
式中,Con为纹理图像对比度值;i,j为像素对灰度值;C(i,j)为归一化共生矩阵。
对比度特征值可反映图像清晰度和纹理强度。
1.3 小波变换
小波变换将原始图像分解成不同分辨率子带图像,并在多尺度上研究分析纹理特征[11]。高频子带反映图像边缘细节信息,低频子带反映图像近似信息。Daubechies小波(简称db小波)具有紧支性与正交性,并且根据求解问题可灵活变换尺度,因此本文将db小波多尺度理论应用于灰度共生矩阵模型。
2 多尺度灰度共生矩阵步长参数研究
步长参数d为两个采样像素点之间的距离,利用不同步长参数值计算所得共生矩阵值将不同;对于粗纹理图像,如果步长参数d取值小于纹理基元幅度,则两个采样像素点间的灰度值具有较大相似性的可能,因此大数值元素就集中于共生矩阵对角线附近;而对于细纹理图像,如果步长参数d取值与纹理基元幅度近似相等,大数值元素在共生矩阵中分布则较均匀;因此需根据具体纹理图像,选择合适的步长参数d,依此值计算所得共生矩阵更适于纹理图像的描述,进而所得纹理特征参数更合理。
规则纹理图像利用合适步长参数d,计算所得共生矩阵非零元素值大部分集中于对角线位置;而不规则纹理图像利用合理步长参数d计算所得共生矩阵非零元素值分布相对较均匀;根据公式(2),计算规则纹理图像共生矩阵的对比度,规则纹理图像由于共生矩阵数值相对集中于对角线位置,因此所得对比度较小,而不规则纹理图像由于共生矩阵元素数值分布相对较均匀,所以计算所得对比度值较大些,总之,合理的步长参数值利于纹理图像的分析。
为降低方向对纹理分析的影响,在计算共生矩阵时,将考虑4个方向,即0°、45°、90°和135°方向值。根据这4个角度值计算出4个GLCM,并以这4个GLCM的平均值作为最终的GLCM。为了利于纹理分析,图像灰度级取16级,即灰度值0~15,对应灰度级1;灰度值16~31,对应灰度级2,依次类推,在此基础上,研究纹理特征参数与步长参数d之间的关系。
本文利用小波变换对图像进行下采样处理,而非采用基本下采样处理方式,既可降低图像数据量,同时也可根据具体纹理图像,选择合适小波子图像,即可根据具体图像处理任务,选择分解后的近似图像,或选择分解后的水平、垂直或对角线细节图像,选择合适的分解图像,利用进一步的纹理分析。
本文利用db小波变换分解纹理图像获得不同分辨率的小波细节图像和近似图像,然后利用对比度纹理特征确定GLCM步长参数。对图2中的原始图像通过db小波分解,获得一级分解图像与二级分解图像。
图2 原始图像Fig.2 Original Image
一级分解图像在水平和垂直方向上像素数是原始图像的一半,因此数据量仅为原始图像的四分之一。依次类推,二级分解图像只有原始图像数据量的十六分之一。近似图像(approximate image)分别是对原始图像进行分解后的平滑图像,Hd是分解后的水平细节图像,Vd是分解后的垂直细节图像,Dd是分解后的对角线细节图像。
对比度纹理特征参数值随着步长参数的增加而周期性地变化。当步长参数在第一周期达到某值时,对比度特征值达到该周期极值,此步长参数便是最佳步长参数。
对图2中的原始图像(original)及其小波分解后的一级、二级分解图像,利用对比度纹理特征值获取纹理图像共生矩阵最优步长参数值,仿真结果如图3所示。依据图3可得出,原始图像最优步长参数值为8,一级与二级分解图像最优步长参数值分别为4和2。一级分解图像的像素数量在水平方向与垂直方向上均为原始图像像素数量的1/2,因此一级分解图像计算所得最佳步长参数值为4。依次类推,二级分解图像所得最佳步长参数值为2。
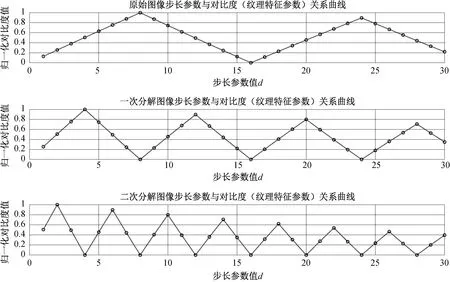
图3 原始图像与一级、二级分解图像最优步长参数仿真图Fig.3 Simulation diagram of the optimal step value for original, one- level and two-level decomposed images
因分解图像的数据量降低了,所以获得最佳步长参数所耗费时间也将减少,运算速度和系统实时性得以改进,如表1所示。后续纹理分析时,由于分解图像数据量已降低,因此后续计算量将降低,实时性较好。

表1 运行时间比较
3 实验仿真
图4为工件两幅纹理图像。对两幅图像分别进行一级小波分解,并对原始图像和分解图像进行分析仿真,结果如图5和图6所示。通过图5和图6分析,可得到两幅原始纹理图像的最佳步长参数都为4,两幅图像的一级分解图像的最佳步长参数都为2。由于两幅工件纹理图像,是在相同进给量情况下加工而成,只是刀具磨损程度不一致,最佳步长参数只与进给量有关,而与刀具磨损量等加工参数无关,因此上述分析与图5和图6仿真结果一致。
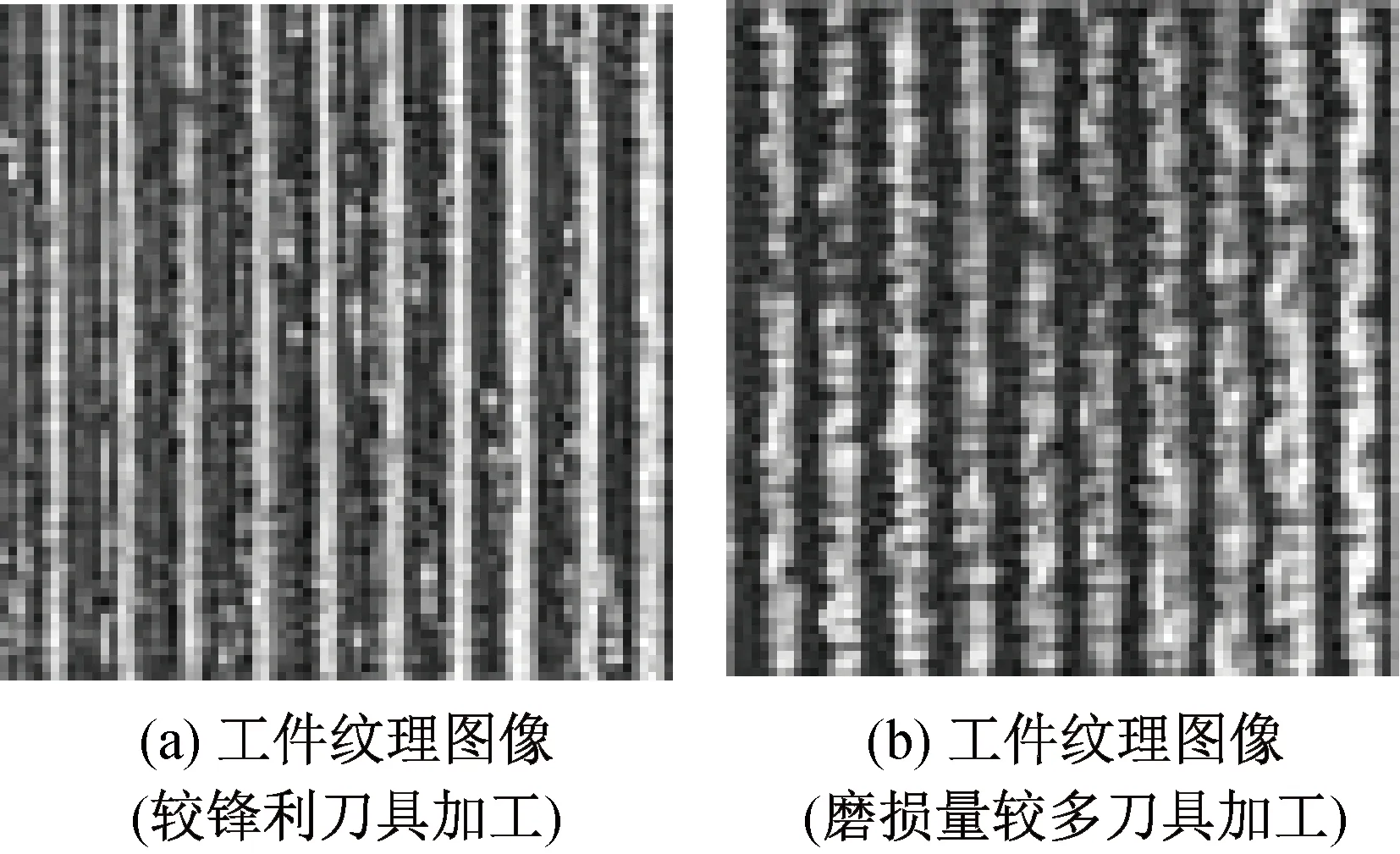
图4 工件纹理图像Fig.4 Workpiece texture image
图5与图6中,当原始图像(最优步长参数为4)与一级分解后的纹理图像(最优步长参数为2)采用最佳步长参数时,两幅图像对比度值(纹理特征参数)区分度较大,从图中可看出,一级分解图像的纹理特征参数值具有更大的区分度;现在研究者大部分都是随机取步长参数进行纹理分析,从图中可见,随机步长参数所对应的纹理特征参数值总体区分度较小,且规律性较差,因此最佳步长参数时,其更利于纹理分析,利于纹理后续处理。
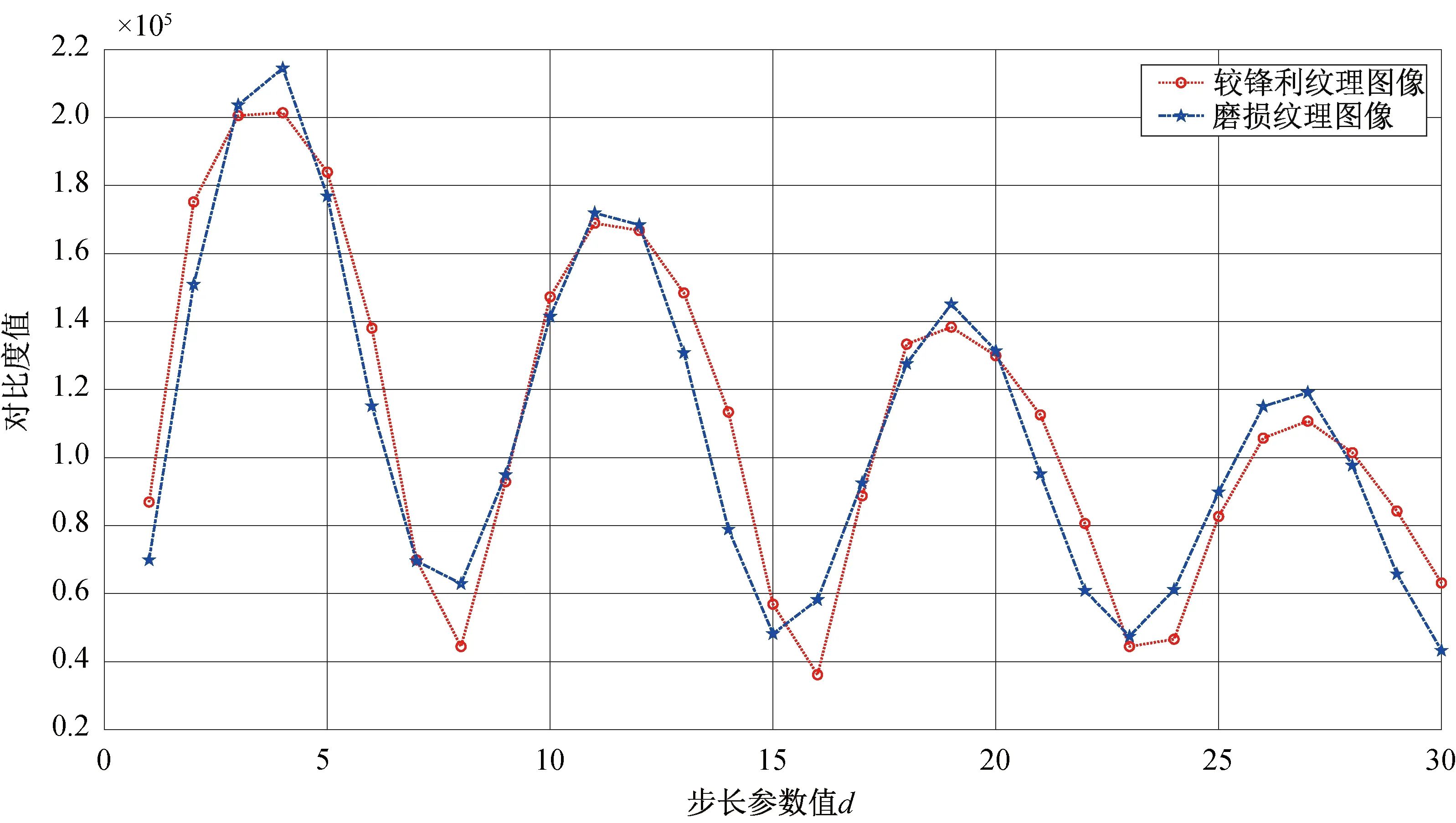
图5 原始工件纹理图像仿真结果Fig.5 Simulation results of original workpiece texture images
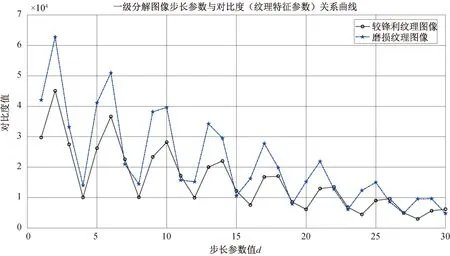
图6 一级分解工件纹理图像仿真结果Fig.6 Simulation results of one-level decomposed workpiece texture images
综上所述,原始图像和小波分解图像都是在最佳步长参数下,更利于纹理分析,同时考虑计算量与计算速度,小波分解图像在最佳步长参数时更利于纹理图像的分析与分类,且后续处理的实时性较原始图像更优。
4 结论
利用小波变换对图像进行下采样处理,而非采用基本下采样处理方式,既可降低图像数据量,同时也可根据具体纹理图像和具体图像处理任务,选择分解后的近似图像,或选择分解后的水平、垂直或对角线细节图像,选择合适的分解图像,利用进一步的纹理分析。由于分解图像数据量小于原始图像数据量,因此计算速度得以提高。实验证明,由分解图像确定最佳步长参数,既精确且高效,提高了系统的实时性。相比于其他步长参数,最佳步长参数更利于纹理分析与纹理分类,因此本文研究为提高纹理分析实时性、精确性奠定了理论基础。
猜你喜欢
兵器装备工程学报(2022年8期)2022-09-13
北京航空航天大学学报(2022年6期)2022-07-02
集装箱化(2021年1期)2021-04-12
电脑爱好者(2020年19期)2020-10-20
无线互联科技(2020年12期)2020-09-03
中国信息技术教育(2020年2期)2020-02-02
科学大观园(2019年10期)2019-09-10
中国经济周刊(2019年9期)2019-05-24
软件导刊(2018年3期)2018-03-26
——中国制药企业十佳品牌
西部大开发(2017年5期)2017-07-05