管道机器人速度采集实验装置设计与误差分析
2021-10-25 17:20串俊刚曾欣代艳霞张锐丽张仕民
科学与财富 2021年25期
串俊刚 曾欣 代艳霞 张锐丽 张仕民


摘 要:管道机器人运行速度对管道作业任务有重大影响,而速度采集系统将为管道机器人速度控制提供速度数据。本文设计了一套里程轮速度采集系统实验装置,该装置包括一个里程轮,计数轮、里程轮安装架,计数传感器及数据采集电路板。通过该实验装置进行实验,对实验结果进行误差分析,检验了管道机器人速度采集系统的有效性。
关键词:管道机器人; 速度采集 ;实验装置 ;误差分析
大口径高流速管道进行检测时,控制管道机器人运行速度的前提是随时检测瞬时速度,并通过控制电路比较,一般利用里程轮装置的脉冲频率来实现。
1.实验目的
设计一个试验用的里程轮数据采集的调速装置,模拟管道机器人不同运行速度时候,里程轮和计数齿轮的转速。试验目的有三条:
第一:以模拟管道机器人在管道内不同的运行速度。此时,里程轮和计数齿轮将有不同的转速。为了模拟这种大区间的速度变化(例如,速度变化范围为0.2~12m/s),在高速下大量脉冲的发出(当V=12 m/s时,脉冲数为277个每秒),电路是否有误判或丢失脉冲的情况。
第二:任何传感器都有误差存在,检验里程轮中转速传感器(耐压型)在高压环境下,其变化特征。另外,需要进行误差检测和标定数据的获取。以期望在里程轮的数据解释算法内,进行有效的校正和误差剔除。所以,模拟装置的设计及数据的获取将十分重要。
第三,检测传感器安装距离对脉冲数量、幅值的影响等,可以通过本试验得到适合的安装距离(相对计数齿轮的表面)。还有,导磁材料对该转速传感器的影响等。
2里程轮试验装置设计
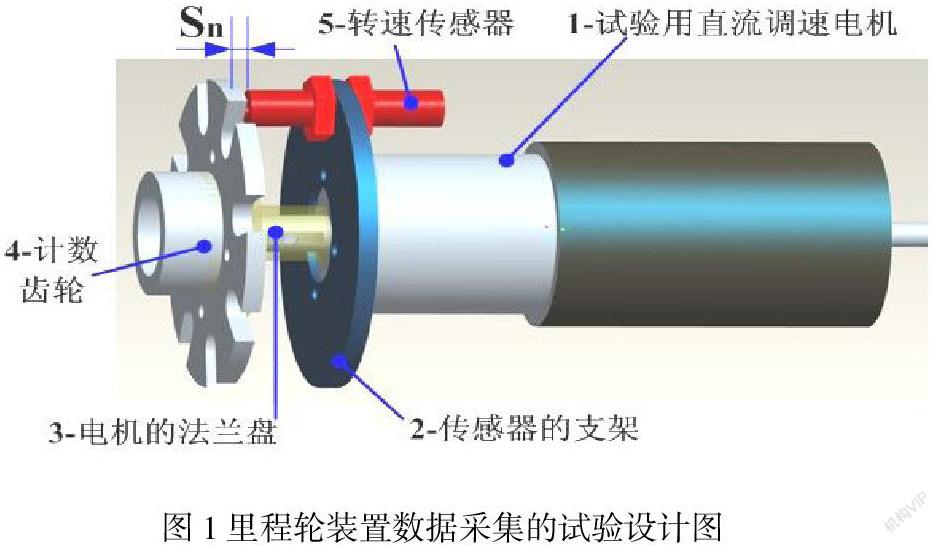
根据设计的计数齿轮的结构和外购电机的参数,设计如下图所示的试验装置。
其中,试验装置的参数:
可调直流电源:0~50V;
直流调速电机:瑞士MAXON直流电机,24V;
转速传感器:霍尔式齿轮转速传感器,上海富兴测控科技公司
最大测量距离S=4mm;
计数齿轮材料:45号钢;
传感器支架的材料:45号钢和铝板(做对比试验);
通电并试验后,将电控部分存儲芯片内,试验中采集数据转换到计算机内,经过数据处理后,得到里程轮的传感器检测出模拟速度的曲线,如图所示:
3误差分析
里程轮在管道内表面转动当遇到障碍时会导致里程轮产生一个跳动从而使里程轮与管道内表面失去接触。里程轮在管道内表面移动,当它碰到焊缝时里程轮会跳起与内壁不再接触。在这一时刻,里程轮在惯性力的作用下将会继续转动,但是脉冲的速率将不再符合管道机器人真实的速度、位移情况。然后,在弹簧力的作用下里程轮回到管道内表面从而再次撞击表面并弹起,产生错误的脉冲值。这在山区的管道,较大坡度的管道内,气流的速度加快,且有管道机器人与管道弯头撞击、气蚀等,将使得里程轮检测瞬时速度的难度更大。
在管道机器人行进过程中,通过轮上的金属凸起所产生的脉冲可以输出机器人所处的位置,但是由于里程轮在滚动过程中不可避免的会受到打滑等因素的影响,因此,该方法存在累积误差,使用多里程轮的定位方法可大大降低该累积误差。
由于里程轮安装在机器人定为单元的从动轮上,因此在产生打滑现象后,里程轮的计数值会小于检测器行走距离的真实值,而采用多里程轮计数后,由于在检测器的行进过程中,每个里程轮的打滑程度均不同,导致其计数值也不同,因此可选取采样时间段内里程轮最大计数值进行累加,最后通过加权平均,得出定位数据。
参考文献:
[1]宋志东等.管道内检测器里程轮信号优选算法的设计与实现[J].管道技术与设备,2006.NO.3
[2]王思凡等.调速清管器新型电磁测速系统设计及仿真[J].油气储运,2016,35(3):327-331
[3]耿岱等.天然气管道速度可控清管器的设计.油气储运,2009,29(9):698-700.
[4]朱霄霄等.可调速清管器速度控制装置设计与研究进展.油气储运,2014,33(9):922-927.
宜宾职业技术学院院级科研项目资助(项目编号:ZRKY21YB-26);
宜宾职业技术学院科技创新团队建设计划资助(项目编号:ybzy20cxtd01)
猜你喜欢
中学教学参考·理科版(2016年8期)2017-02-20
物联网技术(2016年12期)2017-01-21
物理教学探讨(2016年11期)2016-12-19
企业导报(2016年10期)2016-06-04
科技视界(2016年2期)2016-03-30
物理教学探讨(2015年12期)2016-01-11
物理教学探讨(2015年1期)2015-01-29