
基于阵列涡轮和阵列持率仪的水平井油水两相流量解释方法
2021-10-28 03:30李沁泽刘军锋高峰戴月祥彭威水
测井技术 2021年4期
李沁泽,刘军锋,高峰,戴月祥,彭威水
(1.油气资源与勘探技术教育部重点实验室(长江大学),湖北武汉430100;2.长江大学地球物理与石油资源学院,湖北武汉430100;3.中国石油集团测井有限公司新疆分公司,新疆克拉玛依834000)
0 引 言
随着水平井开采技术在中国的广泛应用,对水平井测井资料的解释需求也随之增加。水平井中油水两相流的流动状态与垂直井相比有显著差别,因此,传统的垂直井单探头测井仪器及解释方法在水平井中不具有很好的适用性。对优化注采方案、指导压裂、堵水等作业效果进行评价时,产液剖面资料是不可或缺的依据[1]。找到适用于水平井油水两相流的测量仪器和配套解释方法是准确测量产液剖面、调整油田开发方案、提高油田采收率的关键。
针对水平井和大斜度井的产出剖面解释模型,前人已经做了大量的研究。Hasan和Kabir等[2-3]针对斜井两相流提出了Hasan-Kabir斜井解释模型,该模型加入了针对大斜度井和水平井的井斜校正因子,结合井筒内持水率值求取合适的油相和水相的表观速度。Bybee等[4]提出综合多种不同传感器的测量数据对同一井筒的流体性质进行分析,可以相互指导和验证,并利用各相流体的持水率与井筒截面面积和各相速度的乘积求取各相流体的流量。翟路生等[1,5]基于油水两相流的模拟实验,提出了适合水平井和大斜度井的变系数漂移模型,将相分布系数转化为与持水率相关的函数。
本文根据中国某油田实际的产量和含水特征,设计了油水两相的物理模拟实验方案。采用可测量较广含水率范围的阵列持率仪组合,以及针对低流量流速测量的阵列涡轮流量计,在不同含水率和不同流量条件下进行实验数据采集。在实验数据分析的基础上讨论了2种阵列持率仪在不同含水率范围的适用性。进一步对分层流模型进行完善,提出采用反距离权重插值法预测油水的分布,用拟合的方式估算流速的变化趋势,从而提高了分层流模型对各分相流量的预测精度。
1 实验平台、仪器及数据
本次实验是在中国石油集团测井有限公司新疆分公司的三相流模拟实验平台上进行的。该装置是油、气、水的流动环路,包括1个159 mm内径的模拟井筒和1个125 mm内径的模拟井筒,其中,159 mm井筒仅作为流动环路中的流体通路,模拟实验在125 mm井筒中进行。模拟实验井筒长16 m,可通过控制台来精确控制油、气、水的流量和含水配比。实验中,用柴油和自来水分别代替地层原油和地层水,同时将持率仪和涡轮流量计放置在内径125 mm的模拟井筒进行点测测量。
国外GE公司的生产测井仪器套件(Multiple Array Production Suite,MAPS)由电容阵列持率仪(Capacitance Array Tool,CAT)、电阻阵列持率仪(Resistance Array Tool,RAT)、涡轮阵列流量计(Spinner Array Tool,SAT)和光纤阵列仪(Gas Array Tool,GAT)4组仪器组成,是当前技术水平和成熟度较高的产品。由于SAT涡轮转子叶片半径太小,启动流量较高,在中国低产井中并不具有很好的适用性[6]。因此,该文采用大涡轮叶片改进型的涡轮阵列(Modified Spinner Array Tool,MSAT),其由6个微型涡轮转子构成,间隔60°均匀分布在井筒径向截面上,记录转速和转向数据。
水平井油水两相受重力分异等因素影响,其流型与垂直井相比存在显著差异[7-9]。目前,普遍采用阵列探针的形式进行持水率的分布式多点测量[10]。由于不同流型中油水两相的持水率变化差异巨大,因此,要对本次模拟实验中流量范围内的流型进行划分,确定在特定流型和含水率范围内准确测量持水率的仪器,实现局部持水率和平均持水率的精确计算。本研究采用2种持水率阵列传感器:GE公司生产的电容阵列持率仪(CAT)和中国某公司生产的电阻阵列持率仪(Array Resistance Tool,ART)。其中,CAT与ART均有12个电容探针均匀分布在井筒径向截面上,CAT利用油和水的不同介电常数来识别流相,ART根据导电性差异进行流相判别。
试验方案中,井斜设置为水平90°,依次设置油水总流量为25、30、35、40、45、50、55,60、65、70、80、90、100、110、120、150 m3/d。每组流量下含水率变化为10%~90%,以10%为步长递增。实验记录的数据主要包括:CAT采集的传感器原始响应计数和仪器旋转角度;ART采集的传感器原始响应计数平均值和仪器响应角度;MSAT采集的涡轮转数和仪器旋转角度。分别在同一深度(伪时间深度)范围对上述数据取值,以该深度范围内的平均值作为后续分析的数据基础。
2 建立水平井油水两相流量解释模型
2.1 流型分析
在油水两相流中,由于井斜、含水率和油水两相的速度差异导致两相界面分布呈现出不同的几何形态和流动结构。因此,在基于阵列持率仪的持水率测量中,需要首先对流型进行分析。根据Trallero等[11]、杨梅等[12]和张落玲等[13]的流型分类研究,水平井中流型主要分为界面清晰的光滑分层流、界面混杂分层流、水包油和水、水包油、油包水和水包油、油包水。如图1所示,以低流量45 m3/d和高流量150 m3/d在含水率为70%时为例,应用反距离权重插值算法的结果得到持水率成像。通过观察实验照片、录像和持水率成像等,结合理论流型特征,在125 mm内径井筒中、水平井条件下、150 m3/d流量以内,将实验数据范围内的流型划分为光滑分层流和界面混杂分层流(见图2)。
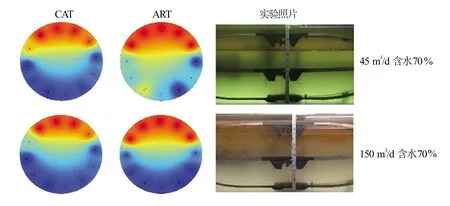
图1 以配比含水率70%为例的持水率成像与实验照片(基于CAT和ART成像)
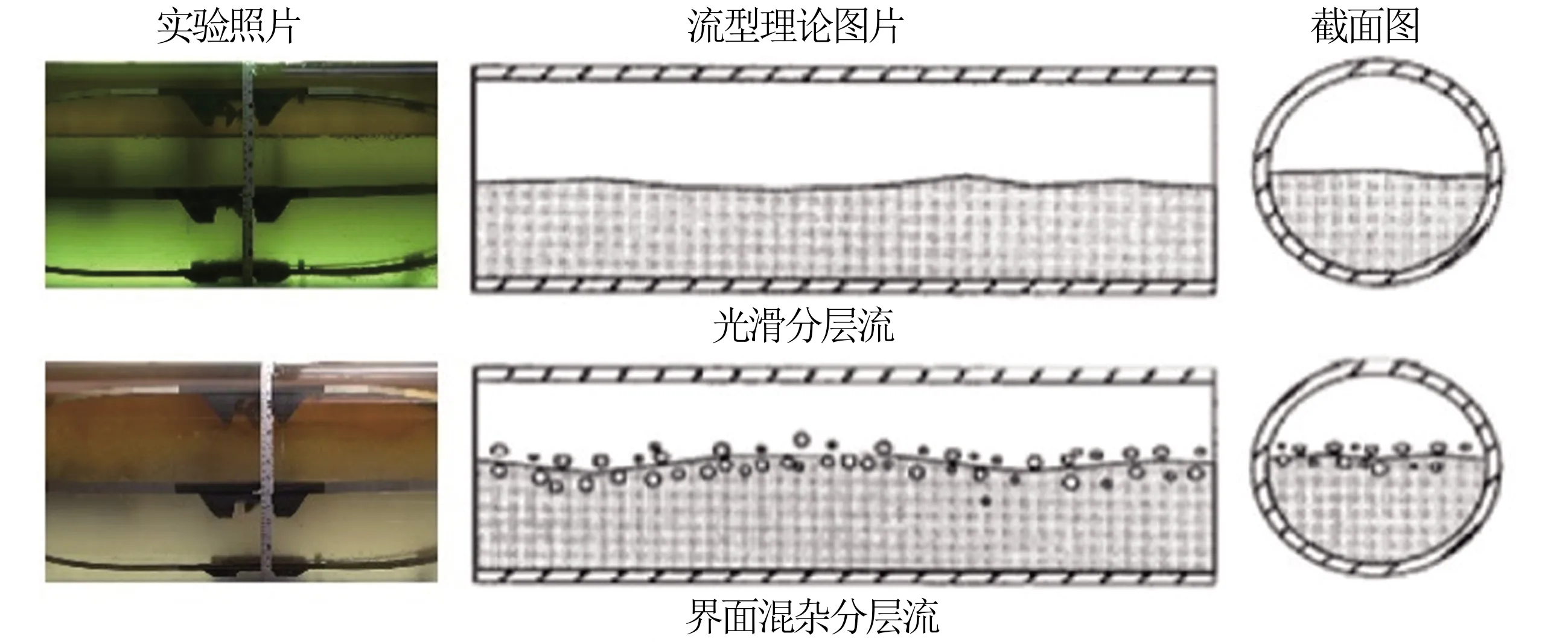
图2 典型实验照片与理论流型
2.2 仪器响应分析及模型解释
2.2.1CAT局部持水率和截面平均持水率的求取
求取探针所在位置的局部持水率时,要对仪器在纯水和纯油中的响应进行标定分析。实验数据表明,CAT各个探针的响应值见表1。计算12个探针所在位置的局部持水率
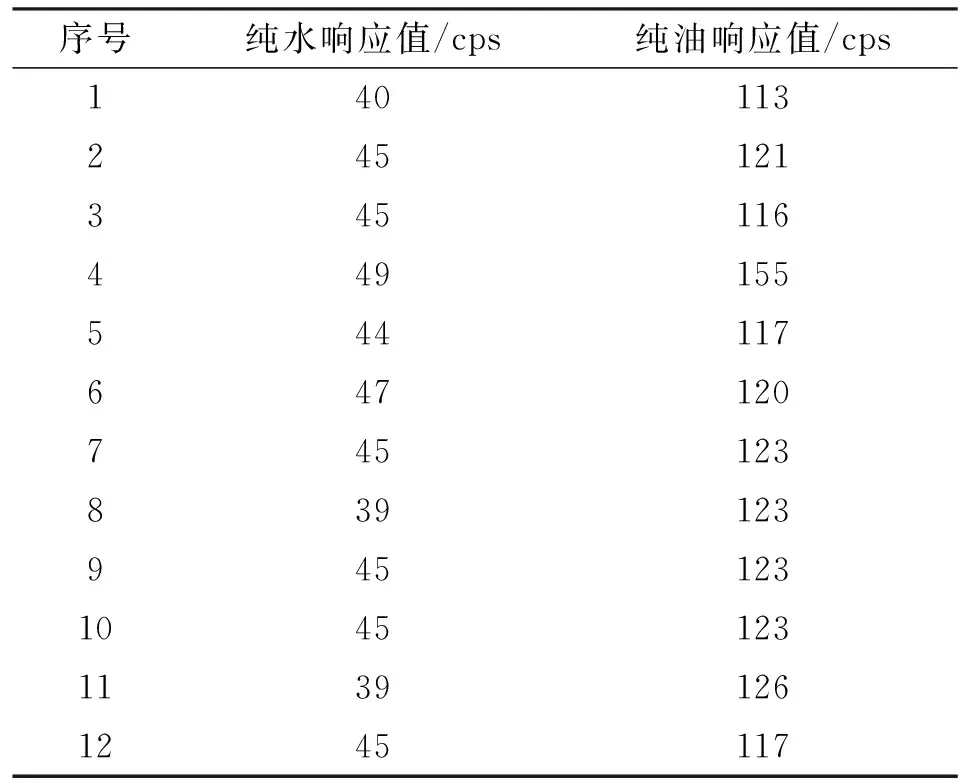
表1 CAT各探针在纯油和纯水中的标定
(1)

考虑到阵列持率仪有限的传感器探针、环形等间隔的分布形式和测量过程中仪器可能发生的偏转等因素对测量结果的影响,采用反距离权重插值法预测油水的分布状态,并基于该方法计算井眼截面的平均持水率:①将井眼划分为N个方块(见图3);
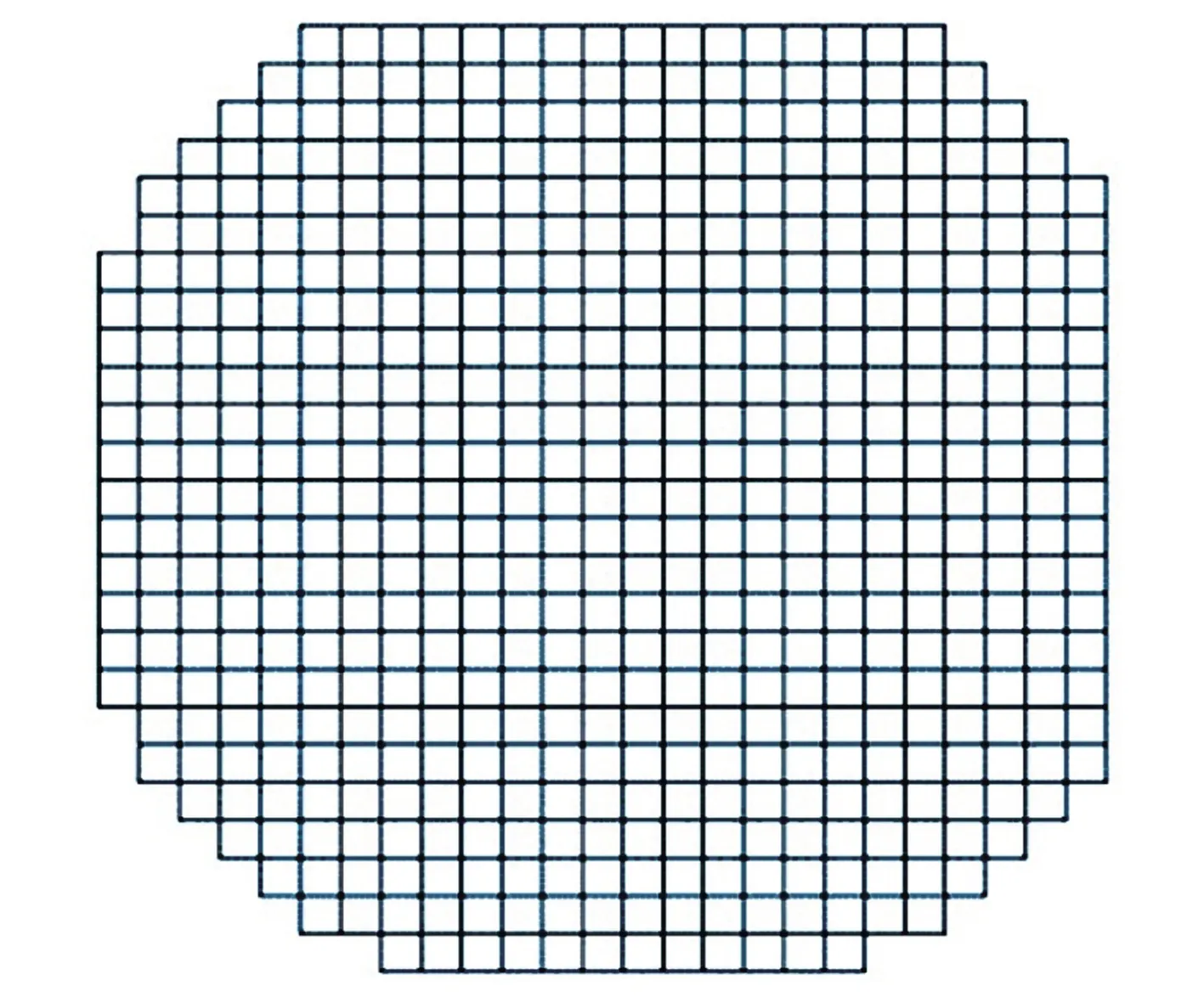
图3 井筒截面网格划分图
②将12个探针原始响应值赋给相应位置的方块,对整个井眼方块进行反距离权重插值;③对于插值数据,将每一行各方块的值设置为原来插值行所有值的平均数,用式(1)对每个方块响应值进行持水率计算;④对各方块进行油、水和油水过渡区的响应范围划分,根据各探针在纯油和纯水中的响应值,将各网格划分为水的范围(0~0.55)、水到油的范围(0.55~0.65)、油的范围(0.65~1.00);⑤分别统计数值范围在水、水到油、油的方块数,根据式(2)计算井筒截面平均近似持水率。
(2)
式中,Yw为井眼中的平均近似持水率,无量纲;NW为判定是水的方块数,个;NWO为判定是水到油的过渡方块数,个;NO为判定是油的方块数,个。
CAT采用反距离权重插值法计算平均近似持水率与关井持水率的绝对误差(见表2)。如表2所示,预测的持水率与关井持水率存在一些误差。因为在125 mm井眼中,有限的探针阵列各传感器间存在一定程度的间隔,同时,在油水分界面随着持水率的增加,液面高度呈现非线性的增加规律。这导致在相同间隔含水率的液面高度区间内探针的非均匀分布,甚至某些持水率液面高度区间中没有探针分布。由此必然产生持水率的预测误差,该误差受到持率测量仪器的旋转以及阵列持率仪探针布设方式和个数的影响。
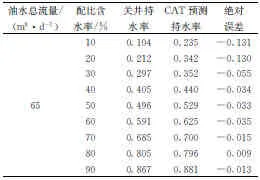
表2 CAT预测持水率与关井持水率误差分析
2.2.2ART局部持水率和平均持水率的求取
采用与CAT一样的处理方式获得ART的局部近似持水率和井眼平均近似持水率。实验数据表明ART各探针在纯水和纯油中的标定值见表3。根据探针的油水标定值,利用式(1)计算ART各个探针所在位置的局部持水率。如表4所示,采用与CAT同样的方法计算ART阵列持率仪探针响应值的平均持水率。
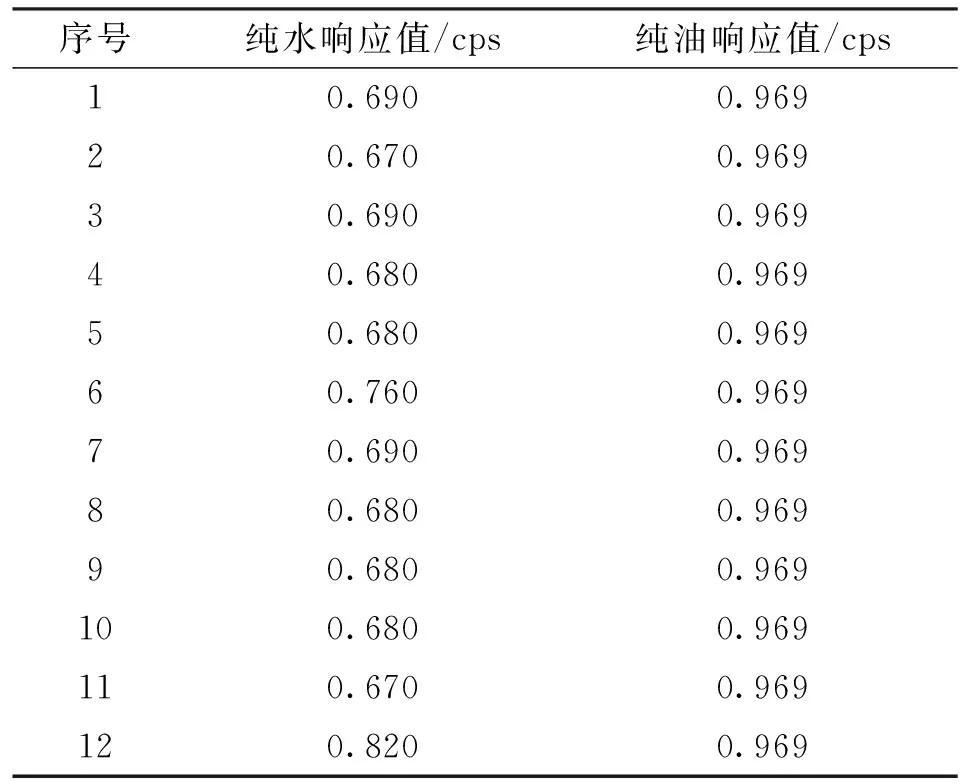
表3 ART各探针在纯油和纯水中的标定值
由表4可见,ART预测的持水率与关井持水率存在一定误差。这种误差成因与CAT测量误差成因相似。差别在于探针在测量原理上的差异,使得ART与CAT在不同含水率范围的测量效果不同。实验数据表明,当含水率低于0.2时,ART与CAT的预测持水率与关井持水率的均方差分别为0.065 1和0.130 5,此时ART测量效果更好。当含水率大于0.2时,ART与CAT的预测持水率与关井持水率的均方差分别为0.047 9和0.031 6。综上所述,ART和CAT都能有效求取井筒中的持水率,但适用范围略有差异。在水平井分层流流型条件下,CAT更适用于含水率大于0.2的持水率测量,ART更适用于含水率0.2以内的持水率测量。
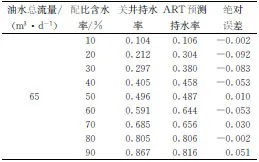
表4 ART预测持水率与关井持水率误差分析
2.2.3MSAT仪器响应分析及局部流速的求取
对MSAT各涡轮在纯油和纯水中转速和流体流速间的响应关系做分析。根据实验中涡轮响应数据和流量配比数据,拟合涡轮转速到涡轮所在区域局部流速的线性关系式(见表5)。表5中,FLOW_1到FLOW_6对应6个不同涡轮的标识;x为该涡轮的平均转速,r/s;y为该涡轮所在位置的预测局部流速,m/s;R2为曲线拟合优度指标。
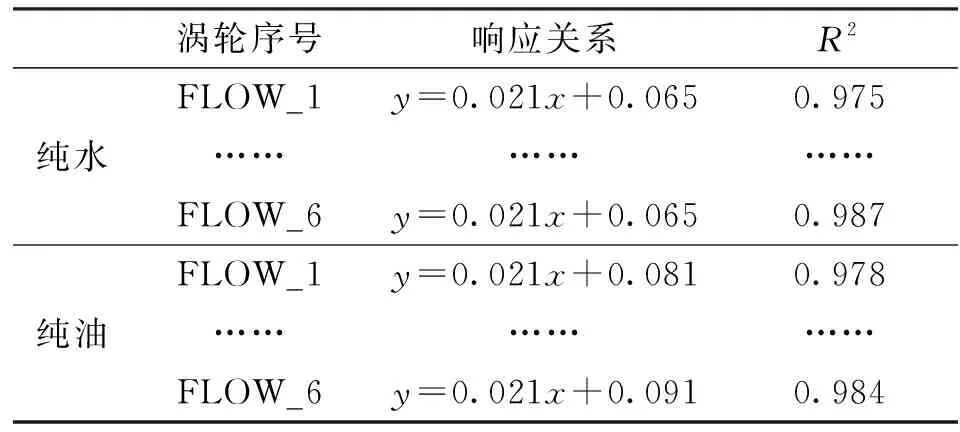
表5 纯水中各涡轮转速到流速的转换关系
由表5可见,改进型的阵列涡轮流量计MSAT在纯油纯水中拟合方程的R2值均在0.900以上,表明MSAT各个涡轮转速与配比流速具有较高的拟合优度,对油、水流速响应有良好线性关系。因此,MSAT在油水两相中分别对油、水流速测量有良好的可靠性。
2.3 分层流解释模型
分层流解释模型是一种基于阵列持率仪和阵列涡轮流量计在水平井油水两相分层流中的流量解释方法。这种方法的思路是将井筒截面网格化,在相同网格的基础上,建立持水率网格数据层、流速网格数据层和面积网格数据层。如图3所示,根据阵列持率仪各探针和阵列涡轮流量计各涡轮的位置决定网格划分,这使得每个持水率网格都有一个速度网格和面积网格与之对应。其流量计算公式
(3)
(4)
式中,Qo为油流量,m3/d;Qw为水流量,m3/d;N为划分的网格数,个;i=1,2,…,N;Si为第i个网格的面积,m2;Yw,i为第i个网格的持水率,无量纲;vi为第i个网格流速值,m/d。
持水率数据层采用插值进行赋值。探针所在网格的持水率由探针响应值换算获取,没有探针的网格采用反距离权重插值算法获取。流速网格数据层采用多项式拟合的方法进行赋值,这种多项式拟合方法是通过将各涡轮投影到井筒截面中轴线上,根据各涡轮相对井筒横截面底部的高度和响应局部流速拟合出四次多项式,它反映了井筒截面中流速的分布规律。涡轮所在网格的局部流速是根据该涡轮转子在该持水率条件下的相应关系换算获取,没有涡轮的网格采用多项式拟合获取。面积数据层是根据井径参数和网格划分数获取。
对流量范围为100~150 m3/d、含水率范围为10%~90%的实验数据,采用分层流解释模型进行流量估算。并利用该分层流解释模型,分别对总流量、水流量和油流量做了预测和误差估算(见表6、图4及图5)。
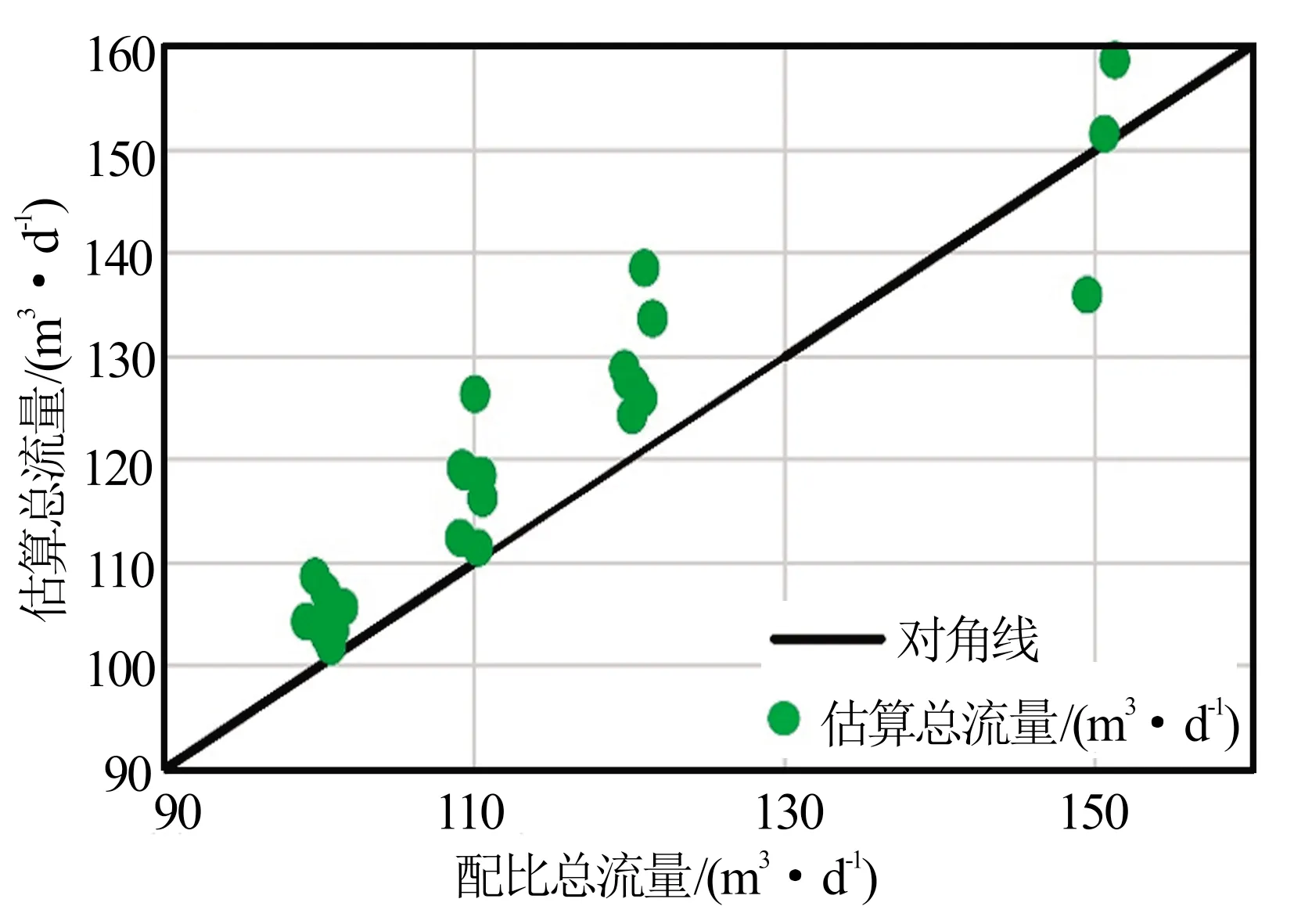
图4 配比总流量与分层流解释模型估算总流量一致性分析图
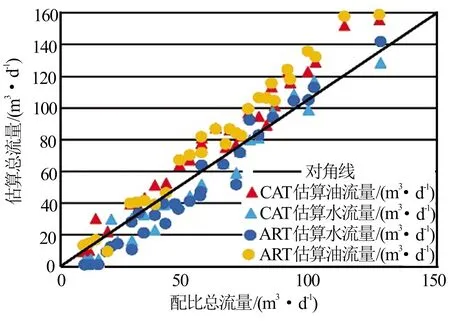
图5 配比油、水流量与分层流解释模型估算油、水流量一致性分析图
如表6所示,估算流量与配比流量存在一定误差。由于阵列涡轮流量计的各个微型涡轮转子在两相流中所处的位置具有复杂性,即涡轮处于纯水中、油水界面附近及纯油中,而油水界面会随机动态变化,这种复杂性导致涡轮转速向局部流速转换时有误差。同时,当各个涡轮转子转速转换为局部流速时,采用多项式拟合方法在铅垂方向上进行流速拟合,尽管在一定程度上接近,但仍然与实际井筒横截面上流体的速度分布存在差异。另外,根据分层流解释模型原理,持水率参数的准确性是计算各分相流量和总流量的重要影响因素。
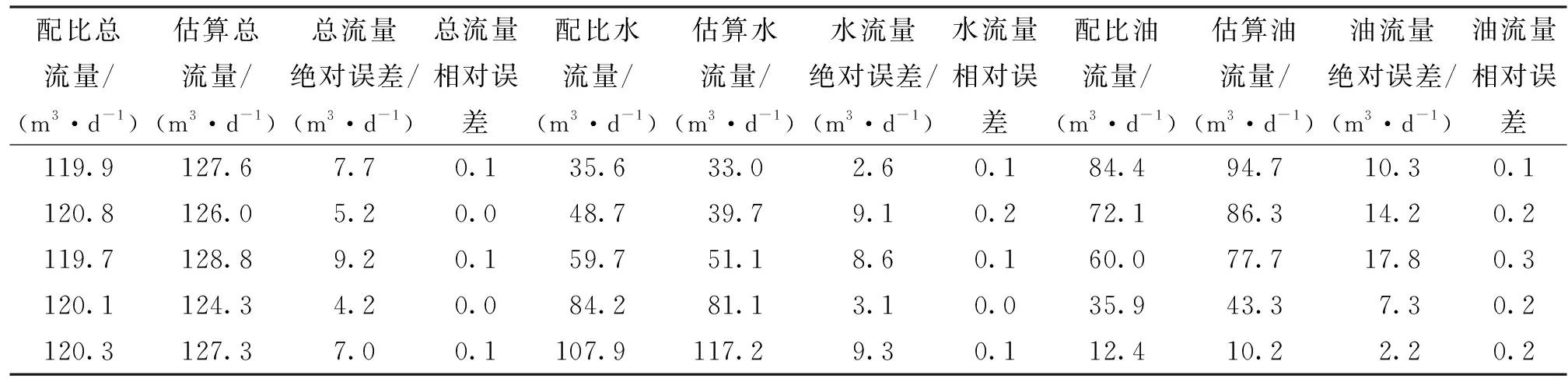
表6 基于CAT的分层流解释模型的误差估算(部分数据)
因此,水平井分层流条件下,采用网格划分的分层流解释模型可以对总流量和各分相流量进行一定准确度的估算,但各分相流量预测精度受到持率仪测量精度的影响大。同时,根据实验数据,整体上CAT对油水各分相流量的估算值更为准确。
3 结论及建议
(1)实验采用了改进型阵列涡轮流量计(MSAT)和阵列持率仪(CAT、ART)的仪器组合。为了尽可能模拟水平井在真实生产过程中油水两相流的流动状态,设计了井斜90°、流量25~150 m3/d、含水率为10%~90%以及步长为10%的物理模拟实验方案。
(2)根据模拟实验结果,在125 mm内径井筒中,水平井条件下,150 m3/d流量以内,流型为光滑分层流向界面混杂分层流发育。根据MSAT各涡轮在纯油、纯水中的响应效果,认为MSAT对油水流速的测量具有良好的可靠性。根据CAT和ART的响应特性和平均持水率的计算结果,认为CAT和ART具有各自的适用范围,CAT更适用于含水率大于0.2的持水率测量,ART更适用于含水率在0.2以内的持水率测量。水平井油水两相分层流条件下,采用网格划分的分层流解释模型可以对总流量和各分相流量进行一定准确度的估算,但各分相流量预测精度受到持率仪测量精度的影响大。总体上来说,CAT对油水各分相流量的估算值更为准确。在水平井油水两相分层流条件下,探索了MSAT和CAT/ART组合测量的资料解释方法,具有一定的借鉴意义。
(3)当前模型计算的各分相流量及总流量还存在一定误差。这种误差可能由3类误差因素造成:阵列持率测量仪在井眼平均持水率中的测量误差,阵列涡轮流量计中涡轮转子所处位置的复杂性导致的误差,从各涡轮局部流速到井眼横截面中两相流速度分布的拟合误差。因此,建议对阵列持率测量仪中探头的个数、分布方式以及解释方法进行更深入的研究。流速测量方面,在已有仪器基础上,对速度分布的准确拟合进行更加深入的研究。
猜你喜欢
工程质量(2022年11期)2022-12-06
汽车实用技术(2022年9期)2022-05-20
广东医科大学学报(2020年4期)2020-08-24
北京航空航天大学学报(2017年8期)2017-12-20
中南大学学报(自然科学版)(2016年2期)2017-01-19
长江大学学报(自科版)(2015年20期)2015-12-01
质量与标准化(2015年12期)2015-07-10
环球时报(2015-03-18)2015-03-18
水土保持研究(2014年6期)2014-09-21
安徽工业大学学报(自然科学版)(2014年4期)2014-07-11
