基于RBF神经网络的DPH-260包装机成型温度控制系统
2021-11-01 01:23张禧莹张廷建张思奇张德强
辽宁工业大学学报(自然科学版) 2021年5期
张禧莹,张廷建,张思奇,李 煜,张德强
基于RBF神经网络的DPH-260包装机成型温度控制系统
张禧莹,张廷建,张思奇,李 煜,张德强
(辽宁工业大学 机械工程与自动化学院,辽宁 锦州 121001)
针对DPH-260型铝塑泡罩包装机成型温度控制系统具有非线性和实滞性的特点,设计基于RBF神经网络与PID控制算法相结合的自适应温度控制系统。构建RBF三层静态前馈神经网络,利用自学习与任意精度下逼近非线性映射能力自动调整训练阶段的隐层单元数,达到最佳逼近精度,在Matlab/Simulink系统中将基于径向基神经网络的PID控制器与传统PID控制器进行建模仿真对比。结果表明:基于RBF神经网络整定的PID控制器比传统PID控制器自适应强,实现了成型温度变化下的自动调整,有效地提高了包装机成型温控系统的控制精度。
RBF神经网络;PID控制算法;成型装置;温控系统
DPH-260型铝塑泡罩包装机的吹塑成型机构决定了药板生产的完整度,吹塑温度更是影响泡罩光滑程度的主要因素。加工中成型装置的温度控制速度与效率产生的剧烈震荡、导热强度与复杂的加工环境形成了未知干扰等因素。这些因素对建立DPH-260型包装机成型温度控制系统精准的数学模型提出了挑战[1]。为了提升控制系统质量[2],本文设计了一种成型装置温控系统,将RBF神经网络与PID控制算法结合应用。需找到RBF的中心点,确立映射关系[3],同时利用RBF最优泛函数逼近能力,经过充分的自学习,可对PID控制器参数实现在线调节,以此提高控制控制精度。为了验证RBF-PID控制算法相结合的成型温度控制系统的稳定性、鲁棒性、抗干扰性[4],应用Matlab/Simulink搭建仿真实验平台,创建实验环境,进行对比分析。
1 吹塑成型机构工作原理
吹塑成型装置安装在PVC预热装置与夹持步进装置之间,此装置可将PVC薄膜吹成光滑均匀分布且等大的泡罩从而形成泡罩带,此步骤分为合模、吹气、开模三个动作。整个装置过程由凸轮机构带动完成,在开模间隙由夹持步进装置完成PVC的进给。
2 控制系统算法研究
2.1 PID控制算法
PID控制,也称为比例、积分、微分控制,通过做差应用于执行机构[5],这是较为有效且成熟的算法。近期,PID控制因其鲁棒性与稳定性高而被广泛应用[6]。PID控制环境是由PID 控制器与执行机构构成的,原理如图1所示。其中误差值()由预设值与采样值对比得到,然后通过K、K、K求和得到输出值()。
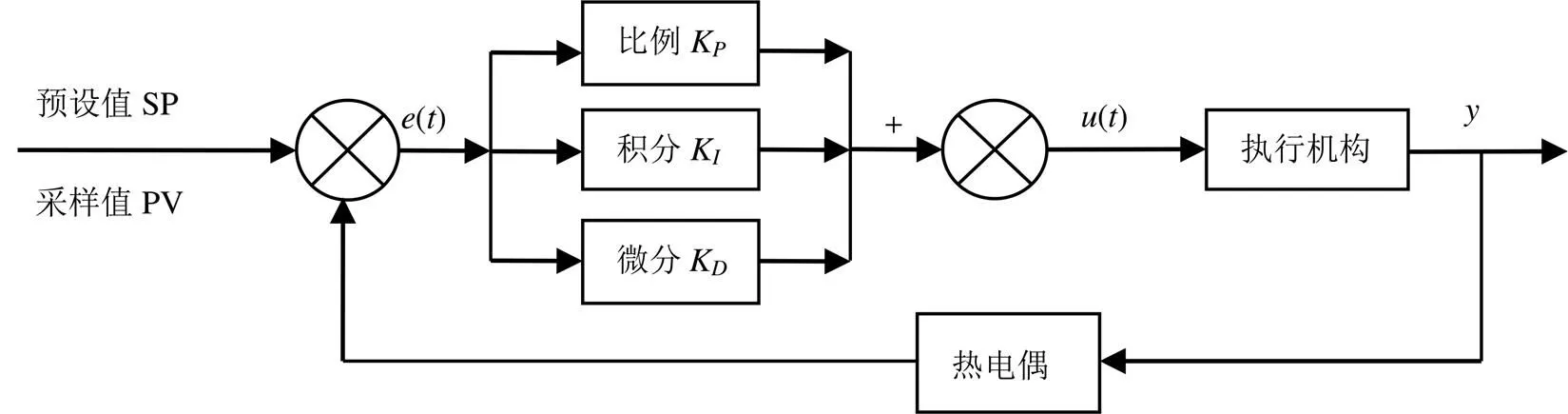
图1 PID控制器原理图
对模拟信号进行PID控制,也可称之为连续PID控制,控制表达式为:

对式(1)进行进行拉式变换:

此控制器的传递函数为:
增量式PID(-1)时刻的控制量:

为了完成包装机温控系统,需要不断调节三个参数,分别是K(比例增益)、T(积分时间常数)、T(微分时间常数),其中K =K /T 为积分系数、K =K ×T 为微分系数。
2.2 RBF神经网络
RBF神经网络是一种类比人脑的属于非线性3层静态的前馈式神经网络,可以对此网络结构分为3层,分别是:输入层、隐层、输出层。其中,选取高斯函数作为隐层到输出层的传递函数[7]。结构图如图2所示。
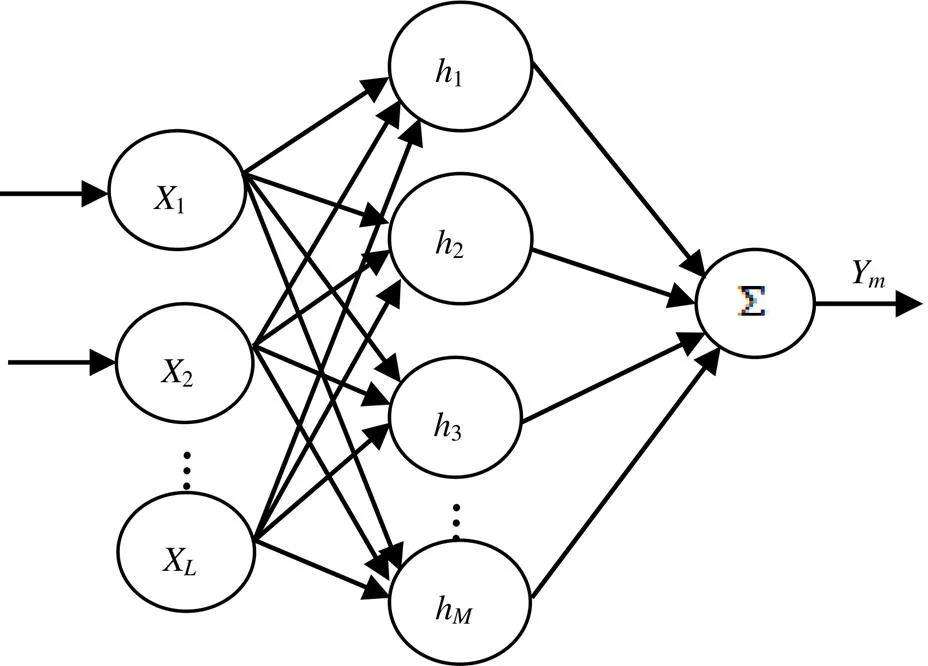
图2 RBF神经网络结构
径向基网络是隐层的空间,是构成隐含层的重要内容。不需要经由权值连接,输入向量可直接输入到隐层中。确认了RBF核心点后,此种映射体系成立。而隐含层空间到输出空间的映射是线性的[8],根据权连接,神经网络参数是可以调节的,隐层输出应用的线性加权和函数评价法是输出方法。
从低维度到高维度,从不可分到可分,以核函数作为主要思想,在隐层中使向量从映射到。为避免局部极小问题[9],提高学习效率,可用迭代法等线性方程直接得出权值。
径向基神经网络的激活函数可表示为:

径向基神经网络的结构可得到网络的输出为:

采用最小二乘的损失函数表示:
式(5)~(7)中:X为第L个输入样本,即成型温度设定值,Y为采样值,即成型装置温度提取实际值,h为第i个中心点,为隐含层的结点数,是输出的样本数或分类数,为高斯函数。
2.3 RBF-PID控制算法
人工调节PID控制器参数费时费力效率低消耗大,针对此问题本文采用径向基神经网络RBF与PID算法相结合的控制方式。热电偶实时采样成型装置温度信息反馈给主控制器[10],主控制器是PID控制器,构成了闭环控制体系,采样周期内包装机的成型机构的温度偏差为RBF控制器输入量。为了实现包装机成型机构温控系统在不同条件下的自适应调节[11],神经网络经过自学习、自调整与优化输出的控制参数,图3为RBF-PID温控系统架构。
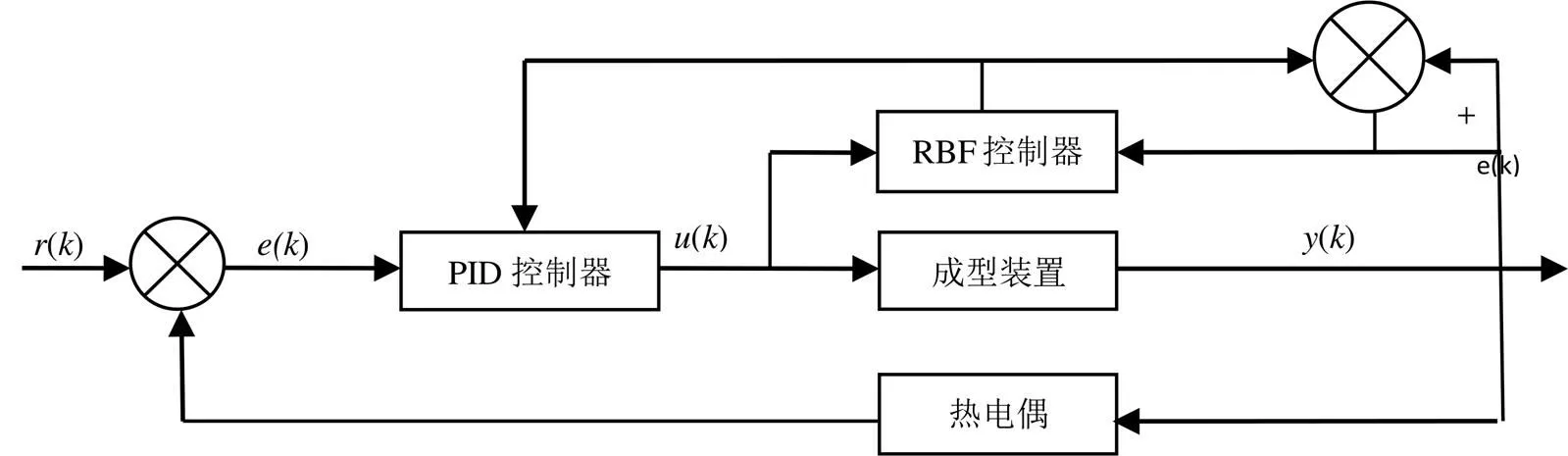
图3 RBF-PID温控系统架构
设包装机成型温度控制时刻的温度误差为:

为系统输入信号,为系统输出信号:



神经网络的训练指标是:
综合式(8)~(12)与PID输出参数调整的梯度下降法、增量式PID控制参数整定表达式、得到包装机RBF-PID成型温度控制器的控制输出量为:

3 Matlab/Simulink实验仿真
为了验证RBF-PID控制器在温度控制系统中的可行性和有效性,于是对RBF-PID温控方式进行了仿真分析,同时与传统PID温控方式仿真结果进行比对。根据薛雷等[12]提出的热封装置函数总结了一种多功能包装机成型装置数学传递函数:

在MATLAB2016a中,PID算法无法与神经网络模块直接连接[13],S-Function自定义函数模块可以解决这个问题[14]。使用S函数自定义模块编写函数、搭建控制仿真环境,如图4所示。
给定可描述复杂信号某一特点的阶跃响应信号,RBF结构是3-5-1,学习速率为0.15,权值为0.01,附加动量参数为0.8。设置比例参数为P=1.75、积分参数为I=0.37、微分参数为D=1.14。RBF-PID与传统PID控制器输出响应曲线的比照图,如图5所示。
图5可知,传统 PID控制器响应曲线上升速率大,响应速度块,但存在超调现象,与RBF-PID控制器相比趋于稳态应用的时间更长。在t=150s时加入23%的干扰量,图中显示RBF-PID曲线更趋于平稳,说明其抗干扰能力优于传统PID控制器。所以,RBF-PID控制器在干扰环境下可以更快保持稳定,超调小、抗扰力好、鲁棒性强,因此,RBF-PID控制器性能优于传统PID控制器。
4 结论
本文提出一种可根据不同环境自动调节参数的RBF-PID控制算法并应用于成型装置中,使用Matlab/Simulink软件进行仿真并在仿真分析中发现, RBF-PID控制器稳定性较好,性能方面优于传统PID控制器,且不依赖人工调节PID 参数,实现了在不同环境下的参数自调节。

图4 MATLAB/Simulink系统仿真模型
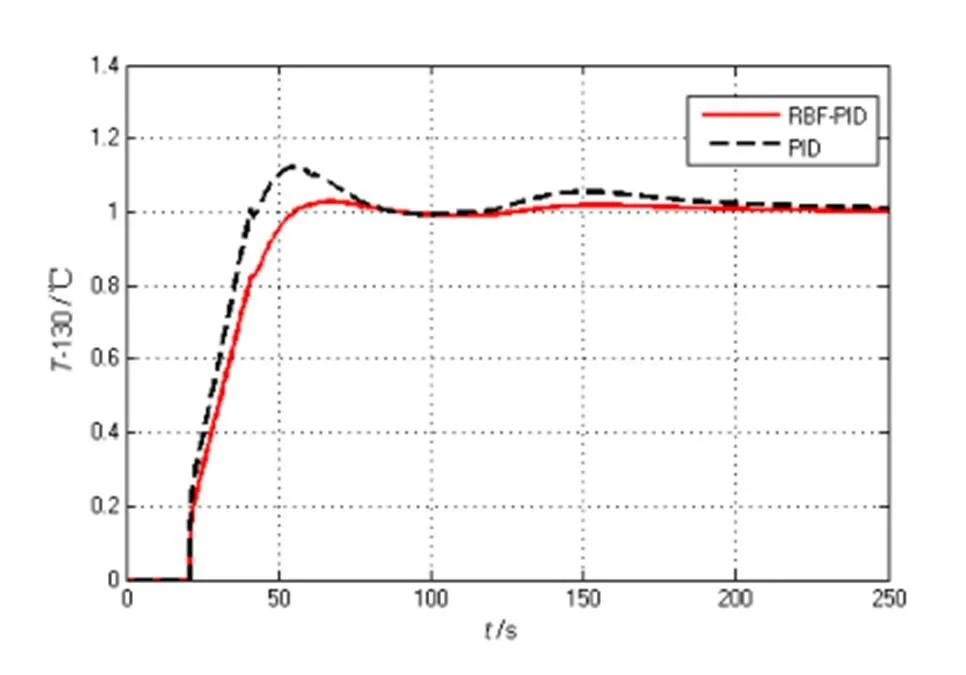
图5 RBF-PID与PID控制器输出响应曲线比照图
本文中DPH-260型铝塑泡罩包装机成型温度控制系统是与锦州中联欧仕科技有限公司合作开发,现已被辽宁某药厂的包装机温控系统应用到生产中。工厂操作人员可以通过昆仑通泰MCGS触摸屏设置调整上、下加热板温度,实现了包装机的智能化控制。
[1] 盛强. 基于PLC的瑜伽垫卷取包装控制系统设计[J]. 制造业自动化, 2017, 39(3): 127-131.
[2] 仇文平. 新型纸箱包装机PLC控制系统设计[J]. 数字技术与应用, 2016, 17(11): 11-12.
[3] 陈明霞, 张寒, 郑谊峰. 基于RBF神经网络的自动包装机温度控制算法研究[J]. 包装工程, 2018, 39(19): 150-156.
[4] 李捷菲. 基于BP神经网络的PID控制系统研究与设计[D]. 长春: 吉林大学, 2019.
[5] 刘金琨. 先进PID控制MATLAB仿真[M]. 北京: 电子工业出版社, 2006.
[6] 宋程, 杜志龙, 李佳伟, 等. 基于PID的蔬菜次氯酸消毒水在线测控系统设计[J]. 包装与食品机械, 2018, 36(2): 30-34.
[7] 周文冬. 基于PSO的自组织RBF神经网络优化设计及应用研究[D]. 北京: 北京工业大学, 2016.
[8] 张海涛. 基于卡尔曼滤波器算法的径向基神经网络训练算法研究[D]. 北京: 北京化工大学, 2007.
[9] 陈明霞, 郑谊峰. 基于插值与神经网络的包装薄膜热封参数分析[J]. 包装工程, 2018, 39(09): 67-72.
[10] Stevens D, Power H, Cliffe K. A solution to linear elasticity using locally supported RBF collocation in a generalised finite-difference mode[J]. Engineering Analysis with Boundary Elements,2013, 37(1): 66-69.
[11] 朱逢锐. 基于RBF神经网络的PID自校正控制研究及应用[D]. 淮南: 安徽理工大学, 2017.
[12] 薛雷, 孙以泽, 李培兴, 孙志军. 基于模糊PID的裤袜包装机热封切刀温度控制的研究[J]. 包装工程, 2013, 34(3): 16-20, 35.
[13] Ioan F, Iosif S. Adaptive fuzzy PI controller with shifted control singletons[J]. Expert Systems With Applications, 2016, 54(1): 110-113.
[14] 杨艺, 虎恩典. 基于S函数的BP神经网络PID控制器及Simulink仿真[J]. 电子设计工程, 2014, 22(04): 29-31, 35.
Molding Temperature Control System of DPH-260 Packaging Machine Based on RBF Neural Network
ZHANG Xi-ying ,ZHANG Ting-jian ,ZHANG Si-qi ,LI Yu ,ZHANG De-qiang
(College of Mechanical Engineering and Automation, Liaoning University of Technology, Jinzhou 121001, China)
In view of the non-linear and real hysteresis characteristics of the molding temperature control system of DPH-260 aluminum plastic blister packing machine, an adaptive temperature control system based on RBF neural network and PID control algorithm is designed. The RBF three-layer static Feedforward neural network is constructed, and the number of hidden layer elements in training stage is automatically adjusted to achieve the best approximation accuracy by using self-learning and the ability of approximating nonlinear mapping with arbitrary precision, in Matlab/Simulink system, the PID controller based on radial basis function neural network is compared with the traditional PID controller. The results show that the self-adaptive PID controller based on RBF neural network is stronger than the traditional PID controller, and the automatic adjustment of the molding temperature is realized, and the control precision of the molding temperature control system of the packing machine is improved effectively.
RBF neural network;PID control algorithm;molding device;temperature control system
10.15916/j.issn1674-3261.2021.05.002
TP273
A
1674-3261(2021)05-0288-04
2020-12-20
辽宁省科技厅2018年重点研发计划指导计划项目(ERP2018106005)
张禧莹(1996-),女,辽宁铁岭人,硕士生。
张德强(1964-),男,河北石家庄人,教授,硕士。
责任编辑:陈 明
猜你喜欢
电力需求侧管理(2022年5期)2022-10-14
包装工程(2022年13期)2022-07-27
包装工程(2022年11期)2022-06-20
选煤技术(2022年2期)2022-06-06
河南科技(2022年8期)2022-05-31
农业工程学报(2022年4期)2022-04-24
湖北工业大学学报(2021年2期)2021-04-28
大陆桥视野·下(2018年2期)2018-03-03
汽车文摘(2016年11期)2016-12-08
汽车文摘(2016年11期)2016-12-08