
涡轮机入流中尾流探测方法分析
2021-11-07 06:12范朝峰袁志钢
探索科学(学术版) 2021年10期
范朝峰 陈 静 袁志钢 张 磊 苏 俊
1.国家电投集团江苏海上风力发电有限公司 江苏 盐城 224399;2.如东和风海上风力发电有限公司 江苏 南通 226499;3.国家电投集团江苏新能源有限公司 江苏 南京 210003
1 简介
相干多普勒测风激光雷达是一种新型的风速风向测定装置,它提供了遥感风速的可能性。这些装置特别适用于需要在边界层的前100 m内进行风力测量的风能应用。它们的空间和时间分辨率允许在公用事业规模的风力涡轮机[1,2,3]周围进行测量和流动征。还对安装在机舱[4]顶部或旋转器[5]内部的激光雷达进行了研究,以获取有关涡轮机入流的信息。这导致了从激光雷达辅助偏航[6]和俯仰控制[7]到功率曲线验证[8]再到风电场控制[9]的各种应用。
与机舱式激光雷达系统相关的问题之一是仅测量风速的视线分量的局限性。为了获得对控制应用(如转子有效风速、偏航失准或垂直剪切)有用的入流信息,需要使用适当的风模型进行重建[10]。通常假设水平均匀性。虽然在均匀平坦的地形中可以很好地满足这一假设,但在复杂地形中或当尾流影响视野时,这一假设被严重违反。
因此,有必要探测违反水平均匀性假设的流动情况。从图1和2中可以看出尾流对激光雷达系统进行的失准度测量的严重影响。
图1例示了三种情况。在与涡轮机对准的左侧水平均质流上显示。在这种情况下,每个焦点处的视线分量相等,并且测得的失准度φ=0。当流动失准时(在中心面板上显示为“>0”的情况),左焦点处的视线分量减小,而右焦点的视线分量增大。这导致了φ>0的测量值。
如果违反水平均匀性假设,即使流动对准,风矢量也具有不同的大小。一个简化的情况显示在图1的右面板中,其中入流的左侧显示了降低的速度。例如,这可能是由尾流引起的。与中心面板类似,这将导致左焦点上的LOS分量减少,从而导致测量的φ>0的失准度,尽管流动已对准。
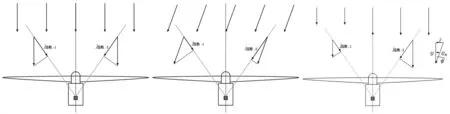
图1 左:与涡轮机对准的均质入流。中心:与涡轮机未对准的均质入流。右:风场左部上的撞击尾流。
尾流对实验失准度测量值的影响见图2。机本文给出了10分钟的平均值。另一台上游涡轮机的尾流位置用黑色垂直线表示。在尾流扇区之外,可以观察到大约 +5°的平均失准度。然而,在尾流内,可以看出失准度变化很大,达到了高达±35°的失准度。这意味着探测尾流的情况至关重要,因为偏置的激光雷达测量结果可能导致涡轮机对准错误,从而导致能量损失。
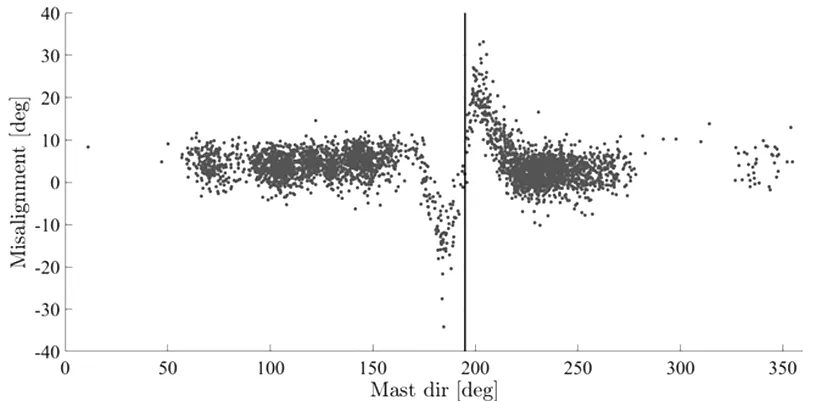
图2 涡轮机失准度与遇见的桅杆风向的关系;垂直的黑线表示尾流状况。
2 方法论
在本研究中,我们希望利用机舱式连续波(CW)激光雷达系统来探测涡轮机入流中的尾流。
视线风速可以用风矢量的视线分量与加权函数的卷积来表示。

这里n是波束单位矢量,r是指向焦点位置的矢量,u是三维风矢量场,s是沿波束与焦点的距离。对于聚焦的连续波相干激光雷达,加权函数(在远焦距处)可以用洛伦兹分布充分近似[11]:

其中zR是所谓的瑞利长度。
尾流探测方法基于两个原理:
(ⅰ)尾流产生的湍流的长度尺度明显小于环境湍流的尺度。文献[12]已经证明了这一点,其中表明添加尾流的湍流可以通过长度尺度比环境湍流小得多的合成湍流来建模。这些模型很好地拟合了实验观察。
(ⅱ)小尺度湍流是增加多普勒频谱宽度的原因。由于连续波激光雷达的大探头体积,小尺度的波动将被衰减。滤波后的湍流将使多普勒频谱变宽。文献[13]对此进行了实验验证。


其中vr(t)是由激光雷达测得的风速(见方程式1),W(t,v)是多普勒频谱,是时间和视线速度的函数,v是积分伪函数。
为了便于探测,用视线速度vr归一化谱方差,得到视线TI。通过比较两种不同射束的值,可以探测到入流中的尾流。LOS TI差异的符号显示了转子的哪一半受到尾流的影响。当遇到与平均LOS TI相比较高的瞬时LOS TI值时,标记为完全尾流。
图3中给出了两种不同光谱的例子,其中一束激光束在尾流中进行测量。两个光谱均在5s内得到。可以看出,蓝光光谱的宽度要大得多,表明存在大量的小尺度湍流。

图3 两个光谱的例子,其中蓝色光谱由于尾流内的测量而显示出增强的峰宽。
3 实验装置
在Vestas V80涡轮机上安装了一个由文大光电公司(WindarPhotonics)生产的连续波短舱激光雷达。该装置是一种范围80m的近程激光雷达,可以在间距角度为60°的两个不同的聚焦位置依次聚焦。测量周期从2014年11月初到2015年3月中旬。共获得约10,000个10min周期。该地点见图4,其中带有激光雷达系统的涡轮机由标记器指示。也可以看到周围的涡轮机。

图4 测试地点的谷歌地球屏幕截图
4 结果
上一节中提到的实验活动的结果可以在图5和图6中找到。测量在焦距80m处进行。首先,显示了视线TI与偏航角的函数关系。在这里,我们考虑了距离配备激光雷达的涡轮机最近的5个涡轮机的尾流。
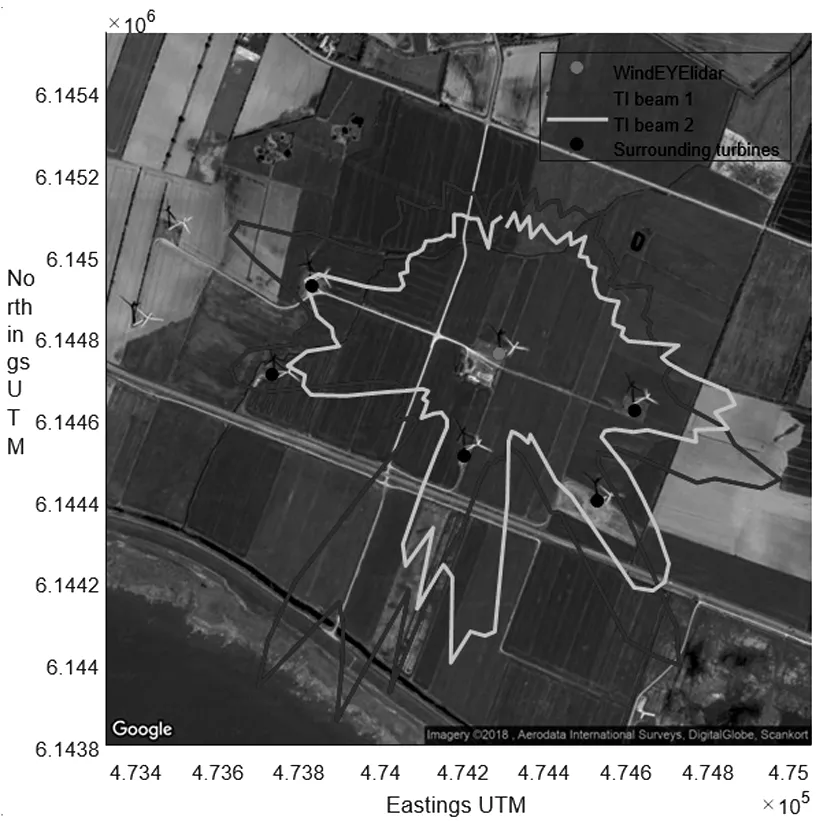
图5 光束1和光束2的LOS TI图解。实点表示涡轮机的位置。
从图5中可以看出,当涡轮机指向周围涡轮机之一时,LOS TI在偏航角处明显更高。此外,当顺时针旋转时,可以看到光束2将首先受到尾流的影响,因为从涡轮机看,该光束指向右侧(再次比较图1)。因此,通过比较LOS TI的差异,可以给出转子的哪一侧受尾流影响的信息。此外,光束2的LOS TI值通常低于波束1的值。原因在于涡轮机平均未对准。光束2上的LOS风速更高,因此降低了LOS TI。
其次,图6给出了尾流探测算法的性能。顶部面板显示了涡轮机相对于其偏航位置的10分钟平均失准角。正弦曲线表明尾流对激光雷达测量结果的影响(与图2相比)。周围的涡轮机显示为彩色垂直线,尾流的正弦影响以它们为中心。较近的涡轮机往往会产生更严重的尾流效应,因为与较远的涡轮机相比,风速不足恢复得更少。
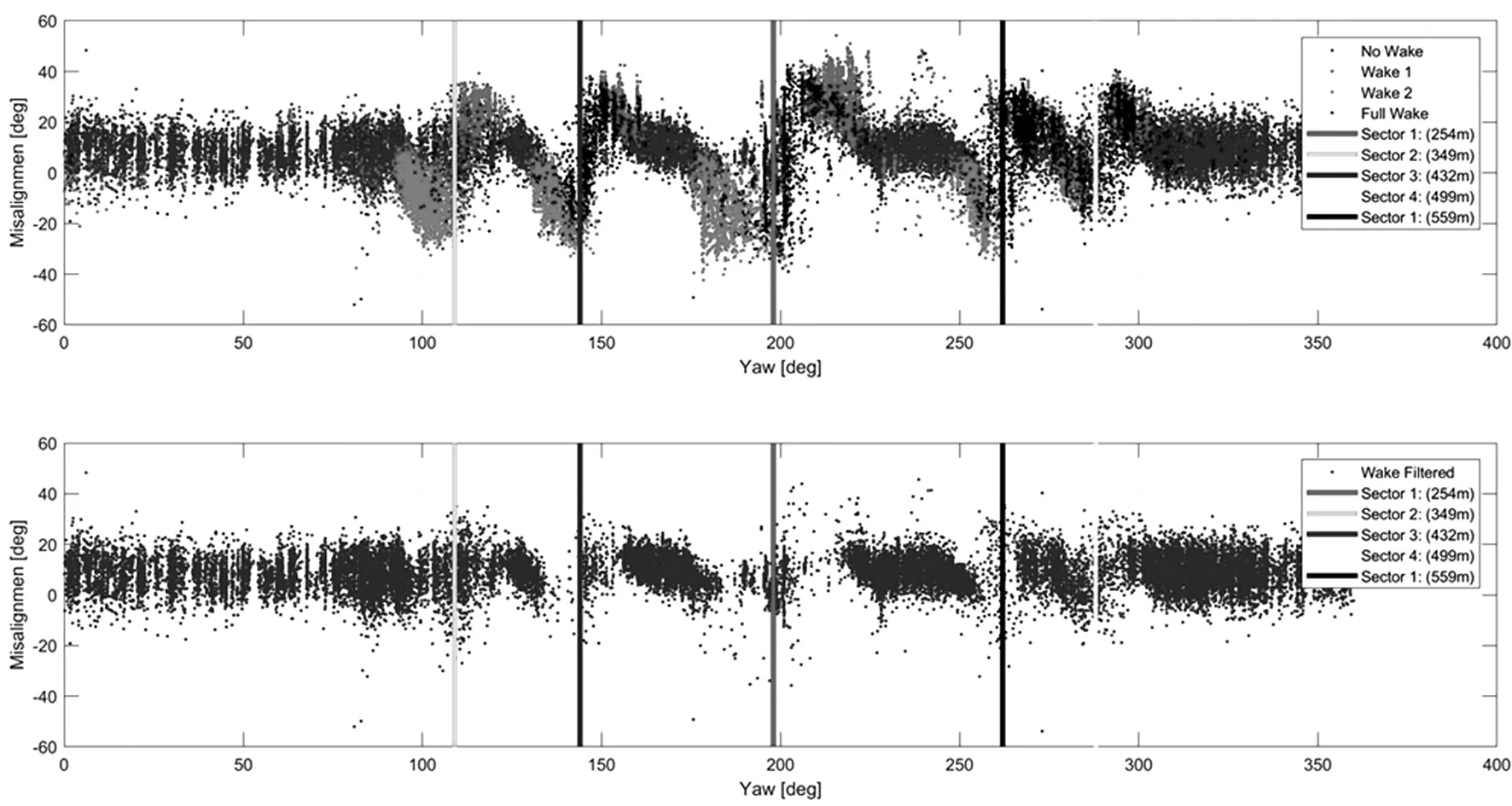
图6 10分钟平均涡轮机失准与偏航位置的关系。垂直线指示周围的涡轮机。
红色、品红和黑色散射点分别表示探测到的半尾流和全尾流状况。这里的尾流1是指转子的左半部的尾流(从激光雷达上看)和右半部的尾流2。可以看出,可以捕捉到相应的尾流状况,并且可以区分半尾流和全尾流。存在一些离群点,特别是对于半尾流情况。它可能是由于额外湍流的非尾流源(如建筑物或树木)所致。
底部面板显示消除所有尾流状况后的失准信号。在这里可以看出,它能够消除正弦尾流影响。这种信号可用于风力涡轮机偏航对准。
5 结论
在本文,我们提出了一种使用2光束机舱式激光雷达探测涡轮机的入流中的尾流状况的方法。
这很重要,因为从激光雷达测量结果中得出风场信息的假设意味着两个光束之一的尾流被解释为大失准。多普勒峰宽可用于测量尾流中发现的小尺度湍流。我们展示了一项测量活动的结果,其中已经测试了尾流探测算法。结果很有希望,这意味着可以探测受尾流影响的涡轮机入流。因此,机舱式激光雷达可用作涡轮机失准传感器。未来的工作包括对不同环境湍流水平的分析。兴趣在于在高环境湍流的情况下测试算法,其中峰宽的差异可能不那么显著。我们还将研究不仅探测尾流而且同时估计尾流不足的可能性。
学习目标可归纳为:
·机舱式激光雷达可以测量风力涡轮机的失准,但尾流状况包括测量中的偏差。
·尾流湍流增加了激光雷达测量结果的多普勒峰宽。
·通过对激光雷达多普勒峰值的比较,可以探测到涡轮机入流中的二次集中统计矩尾流。
·一种探测算法可以用来标记受尾流影响的入流,从而允许机舱式激光雷达用作涡轮机失准
猜你喜欢
环球时报(2022-07-27)2022-07-27
舰船电子工程(2021年6期)2021-06-28
科学与财富(2021年33期)2021-05-10
当代化工(2020年5期)2020-08-25
专用汽车(2018年10期)2018-11-02
当代陕西(2018年12期)2018-08-04
海峡摄影时报(2017年7期)2017-07-14
雷达学报(2017年6期)2017-03-26
探测与控制学报(2015年4期)2015-12-15
弹箭与制导学报(2015年1期)2015-03-11
