液压自动抓梁模块化设计的研究及应用
2021-11-16 11:18曾文,范如谷,赵明,谭晓波,代新启
四川水力发电 2021年5期
曾 文, 范 如 谷, 赵 明, 谭 晓 波, 代 新 启
(中国水利水电夹江水工机械有限公司,四川 乐山 614100)
1 概 述
液压自动抓梁是水电站进行闸门启闭操作的关键设备之一。该类抓梁能较好地实现水下自动穿退销和防意外退销功能,具有方便与闸门接口、适应不断增加的大启闭容量要求等诸多优点,在我国大、中型水利水电工程中应用广泛,特别是随着高坝、大坝建设的日益增多,还面临着适应超过100 m水深和多泥沙水体等特殊环境使用的要求。
目前,液压自动抓梁的设计普遍是针对每一项工程的具体要求,且以经验设计为主,其设计周期较长、效率低、成本较高,进而影响到产品的可靠性和质量稳定性,而模块化设计方法能在制造成本、设计周期、快速响应以及便于提高可靠性等方面满足用户的需求,提高了产品设计的自动化程度和竞争力。
针对液压自动抓梁的使用与工作条件、功能、组成、结构及接口关系,研究了各部件的作用和关系,确定了各零部件模块化设计的基本思路,提出了液压自动抓梁模块化设计方案,并针对三维模块化快速设计进行了一些探讨。
2 模块化设计的原则和思路
2.1 模块划分原则
模块划分过程中,应充分考虑客户需求、设计特征、功能结构、装配、成本和维修等综合因素,应遵循以下相关基本原则[1]:
(1)结构完整性和系统性。模块化[2]是从系统优化的角度将产品的总体功能要求按照模块应具有的基本功能特征、结构特征以及模块划分原则,将产品合理划分成多个模块的过程。在模块划分过程中,首先对产品的总功能进行充分的分解,得到一系列基本功能单元,形成系统的科学与应用相结合的模块分类方法。
(2)功能独立性及可扩充性原则。模块划分对分类子系统的扩展、对模块类别的开拓要有良好的适应性,模块内部要有强关联性,模块与模块之间为弱关联性,而不致于产生不良效果。在实际应用中,对识别模块划分、选择模块需要简明、准确。
(3)模块划分数量合理。应重点解决好模块划分的总体功能分解方案及分解程度、功能单元程度的衡量及按模块化设计的价值与效益确定模块划分的数目。
(4)相关性。模块划分层次的有序程度是保障模块相关性的重要条件,模块划分层次的设计对于体现其科学与实用性具有至关重要的作用。
2.2 液压自动抓梁设计的思路
在液压自动抓梁设计过程中,需要满足模块化和参数化快速设计建模的要求,最终采用了“自顶向下[3]”的设计方法, 即设计思路是从“总体设计”到“模块设计”。
(1)总体设计模块化搭建。根据“自顶向下”的设计方法,在产品总体设计规划过程中,首先建立了启闭机、门槽及闸门总体布置的三维约束架构和主轴线架构,确保了总体模型主轴线和约束清晰,液压自动抓梁骨架见图1。
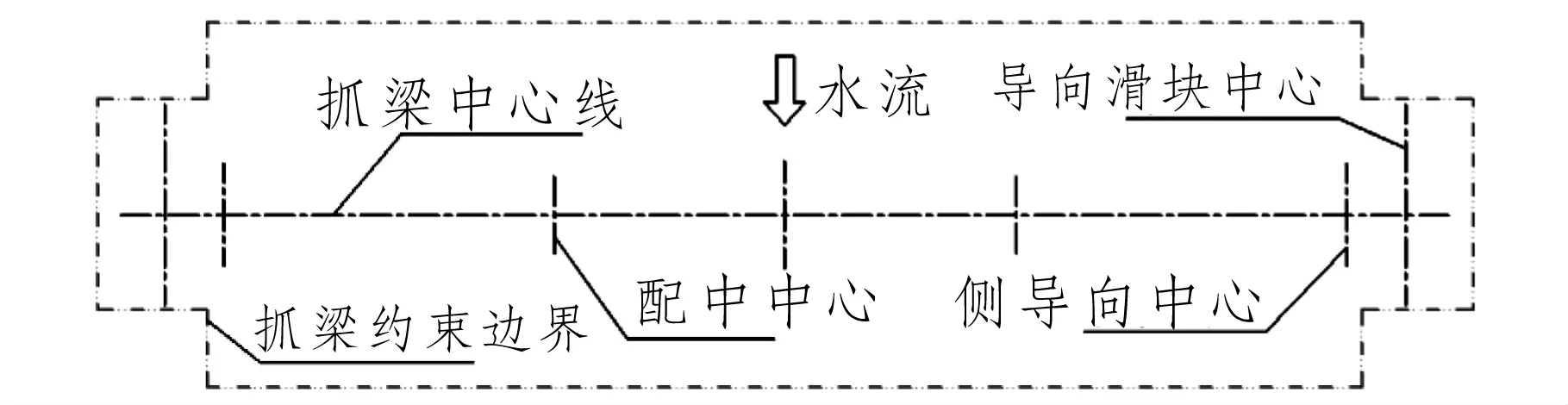
图1 液压自动抓梁骨架图
(2)三维结构产品模块划分后,液压自动抓梁总体平台的三维结构需要与所划分的模块对应,总体设计时需要创建总体布置的设计意图,然后搭建产品的三维结构(架构),其中包括一级模块和二级模块的三维结构。
(3)模块位置架构的设计。在总体设计过程中,按产品设计参数和三维约束架构布置各个模块的安装位置,根据“自顶向下”的三维建模原则,各个模块的安装位置需通过所建立的安装坐标系确定,因此,要创建整机位置架构并在该架构模型中设置各模块的安装位置坐标系。
(4)模块接口架构的管理。在前期模块规划和划分过程中,应充分分析各模块之间的接口及接口形式,确定典型应用接口,包括连接法兰、安装孔、空间干涉检查、检修空间、力传递等,其接口的位置由模块安装位置坐标予以体现。
(5)模块间接口关系的处理原则。为了保持模块之间的独立性,模块化产品的“自顶向下”设计原则要求将接口架构坐标作为各模块设计的输入,不允许模块之间直接的外部引用关系,避免模块间通过外部复制几何的形式传递设计条件,既保持了设计接口正确,又保持了两个模块之间的独立性。
(6)模块设计。模块化产品中的模块要求具有较高程度的独立性,模块本身从结构和功能上是相对独立的,贯彻“自顶向下”的设计思路。不同的是模块本身要继承接口的约束条件以及相关模块的位置信息,即模块设计架构需要将接口、位置信息作为模块自身的外部参考条件。在模块配置层装配时,首先按默认的方式装配整机模块位置,按坐标系对齐的方式将本模块位置架构安装到整机位置架构上,然后采用坐标系对齐的方法安装相关的一级接口和二级接口,再安装本模块的参数架构。
3 液压自动抓梁的模块化设计
为满足大型、超大型水电站建设的要求和不断的技术创新,液压自动抓梁[4]工作水深超过100 m及大型化趋势明显,其所承受的载荷越来越大,对安全可靠性要求越来越高。但目前各厂家的液压自动抓梁设计与制造基本上还停留在传统的设计理念上,在产品设计开发手段、模块化设计方法、设计周期、设计质量管理等方面的差距仍然较大。针对液压自动抓梁模块化进行了以下分析。
3.1 液压自动抓梁的组成及原理
液压自动抓梁通常按其上、下吊点数量进行分类,一般可分为以下几种类型,液压自动抓梁上下吊点型式见表1。
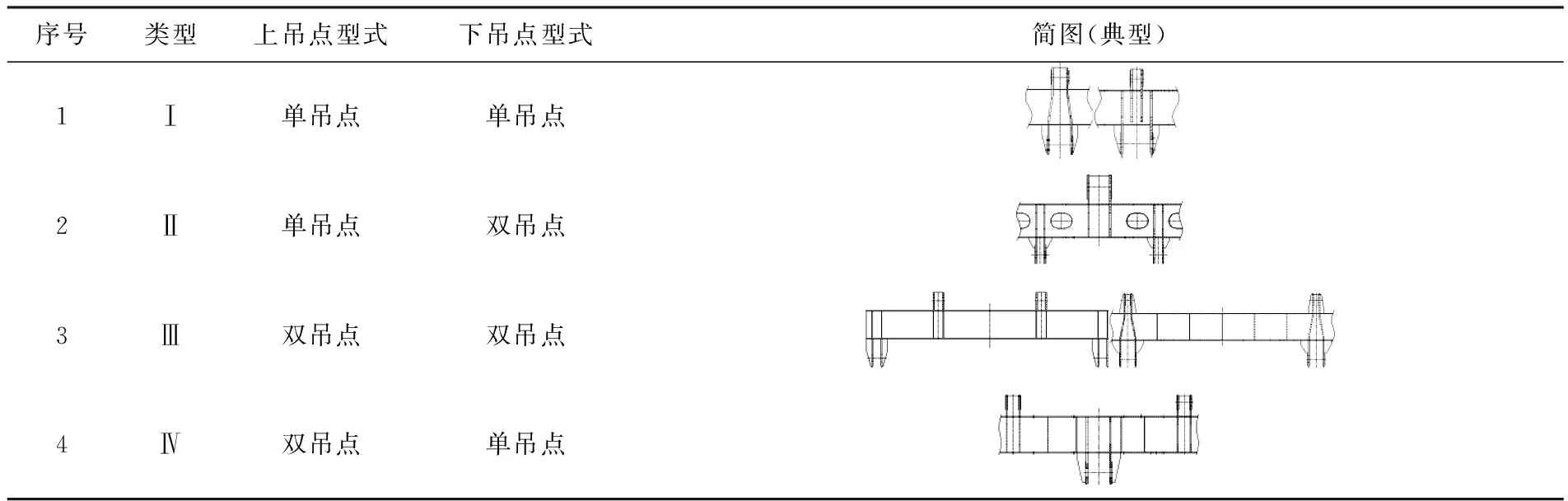
表1 液压自动抓梁上下吊点型式表
液压自动抓梁主要由抓梁体(包括上、下吊耳结构等)、平衡重、主/反导向装置、侧导向装置、闸门定位导向装置、抓梁/闸门到位检测装置、穿销装置、液压管线、液压泵及电缆(主)接头等组成,液压自动抓梁结构示意图见图2。
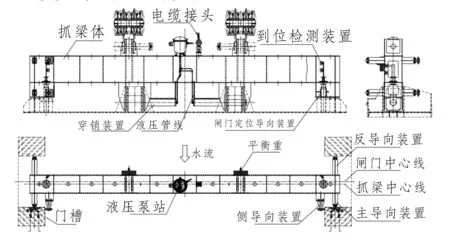
图2 液压自动抓梁结构示意图
液压自动抓梁的基本功能是在门桥式启闭机操作控制下,由液压抓梁液压控制系统驱动穿退销装置、按操作的指令完成抓取和启闭闸门。
3.2 液压自动抓梁模块化设计的总体方案
液压自动抓梁模块化设计流程:
已有产品和用户需求分析→产品功能分析→确定产品系列→确定产品主参数及参数范围→模块化分析→主要模块化划分→模块结构设计(包括模块标准化和系列化)→三维参数化建模→编制技术文件→完成液压自动抓梁模块化及参数化设计。
液压自动抓梁的机械结构按模块化、参数化、系列化、标准化的设计要求进行设计,液压抓梁模块划分见表2。
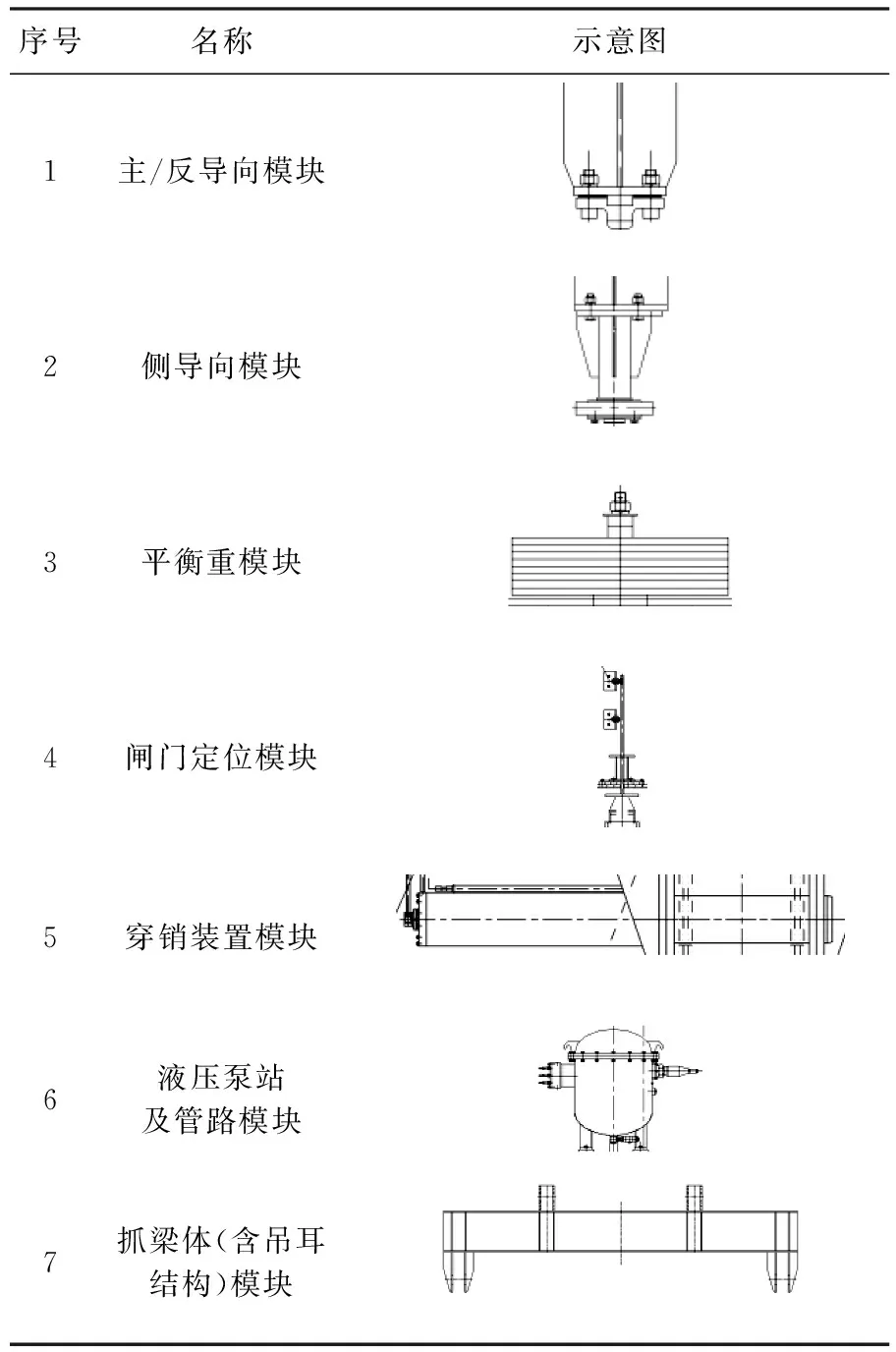
表2 液压抓梁模块划分表
3.3 穿销装置模块化设计
鉴于原设计方案中的穿销装置缸径和杆径规格过多,达到了11种且不统一,不利于设计和制造块化和减少密封件等原器件的规格,增加了备件的准备时间和用户维护难度。对此,开展了以下研究工作。
(1)液压自动抓梁穿销装置规格统计。根据对历年约124套液压自动抓梁进行的数据统计:吊轴直径范围为100~360 mm,共有11种油缸直径与活塞杆径的组合,其中缸径范围为63~160 mm,杆径范围为45~90 mm,油缸直径与活塞杆径组合情况见表3。

表3 油缸直径与活塞杆径组合表 /mm
(2)穿销装置模块化设计。适应吊轴的直径范围为100~360 mm。重新规划后,将穿销油缸/活塞杆优化为4种组合规格(缸径范围为63~130 mm,杆径为45~80 mm),穿销油缸/活塞杆直径优化情况见表4,穿销装置模型见图3。

图3 穿销装置模型图

表4 穿销油缸/活塞杆直径优化表
3.4 液压泵站模块化设计
3.4.1 液压泵站性能需求分析
穿销装置模块化和系列化设计后规格减少为四种,从而为液压泵站模块化设计打下了较好的基础,针对功能、规格参数、控制方式、可靠性进行了以下分析:
(1) 液压泵站为穿销装置的吊轴“穿-退”提供驱动力,其吊轴“穿-退”时间偏差没有明确的要求,即吊轴“穿-退”速度可以在较大的范围由设计人员取值。
(2) 一般液压自动抓梁的液压系统采用常规控制方式,即用电磁换向阀控制吊轴的“穿-退”,该方式容易实现,但需要有电磁换向阀控制线从启闭机通过主电缆接入到液压抓梁的泵站内,需占用较多的电缆芯数。液压缸动作亦可采用液控方式,由于门桥式启闭机制造厂在液压专业不具备相应的优势,导致该方式在液压自动抓梁中的使用相对较少,其控制操作简单的优势没有得到发挥。
(3)为提高液压泵站的可靠性,对泵站壳体密封结构、中间接线箱及漏水检测等方面需要进行进一步的优化。
3.4.2 液压泵站的详细设计方案
(1)经核算后得到的四种规格穿销装置吊轴“穿-退”速度范围为:0.8~4.5 m/min。考虑到同样需要液压泵站的液压耙斗,将液压泵站统一为两种规格,其油泵规格分别为6.1 mL/r及18 mL/r。
(2)液压系统由“电磁阀控制”优化为全液压控制,取消了电磁换向阀。通过双向油泵和单向阀实现了油缸“伸出/退回”,同时亦减少了各类元器件及主电缆的芯线数量,液压泵站及原理见图4。经13 000余次无水试验和17 000余次水下(压力为1.46 MPa)试验,其动作安全可靠。
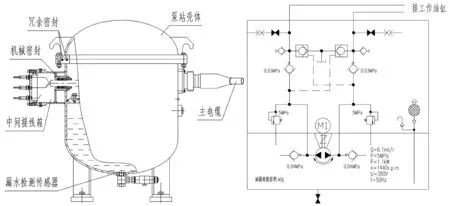
图4 液压泵站及原理图
3.5 导向装置模块化设计
导向装置主要包括主/反导向模块、侧导向模块。将主/反导向模块进行系列化,通过调整参数改变上下游导向滑块装置的长度,进而改变抓梁中心线与门槽中心线的相对位置。根据闸门的导向形式,通过选择最终确定侧导向模块的形式。图5为常见抓梁导向滑块装置示意图。
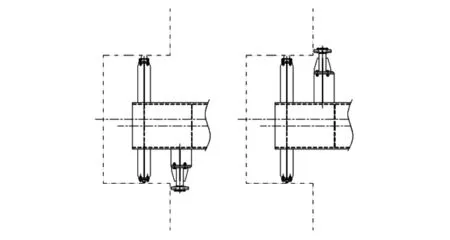
图5 常见抓梁导向滑块装置示意图
3.6 抓梁梁体(含上、下吊耳)模块化设计
抓梁梁体为液压自动抓梁承载主体。液压自动抓梁上下吊点型式见见表1。
3.6.1 上、下吊耳连接结构设计
当抓梁上、下吊点有偏差时,目前常用的吊板结构形式有以下几种(上、下吊耳连接结构形式见图6)。
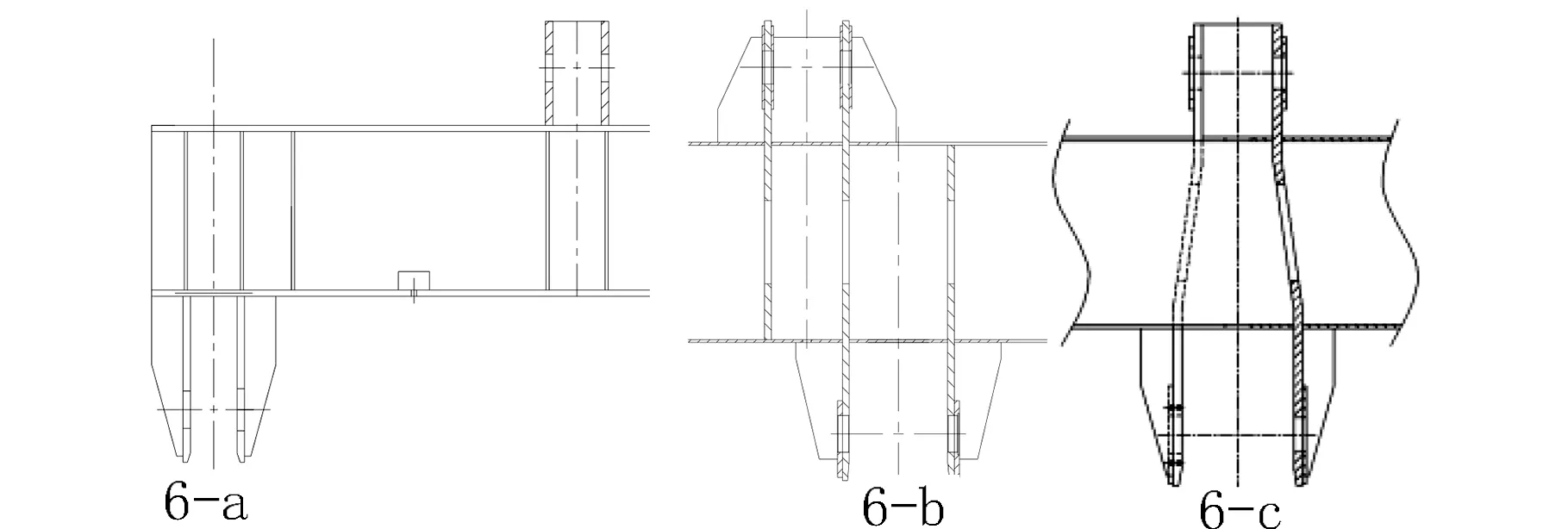
图6 上、下吊耳连接结构形式图
对于偏差较大的采用图6-a结构形式;对于偏差较小且有焊接空间的采用图6-b结构形式;对于偏差较小且空间较小的采用图6-c结构形式,即采用吊板折弯方式。
当上、下吊耳吊板中心线不是一条直线时,根据对历年来抓梁中吊板的折弯角度α进行统计,取吊板折弯角度α上限为15°(吊板折弯处中心线与竖直方向的夹角),并将15°作为判断参数,当偏角大于15°时,上、下吊板将分开,并根据梁高和抓举容量选择对应的连接方式,如图6-b。
3.6.2 抓梁重心问题
抓梁在使用过程中必须保持平衡才能顺利通过门槽口部。为保证抓梁平衡,一般通过设置平衡重来调整抓梁重心。而目前所使用的部分抓梁平衡重较重,因此,实施过程中将上吊耳板孔心往需设置平衡重的方向调整,调整距离小于理论的平衡距离,通过这种方式可有效减轻平衡重的重量。为调整制造偏差,设置了少量平衡重进行调整[5]。
3.7 到位信号装置标准化
按照模块划分原则,将抓梁到位信号装置统一为以下两种情况(到位信号装置示意图见图7)。
(1)对于闸门有冲水阀的穿销到位装置。根据穿销装置的相关尺寸,确定了两种工况下两个位置传感器的位置(图7-a)。
(2)对于无冲水阀的闸门,根据穿销装置的相关尺寸,只需确定一个位置传感器的位置(图7-b)。
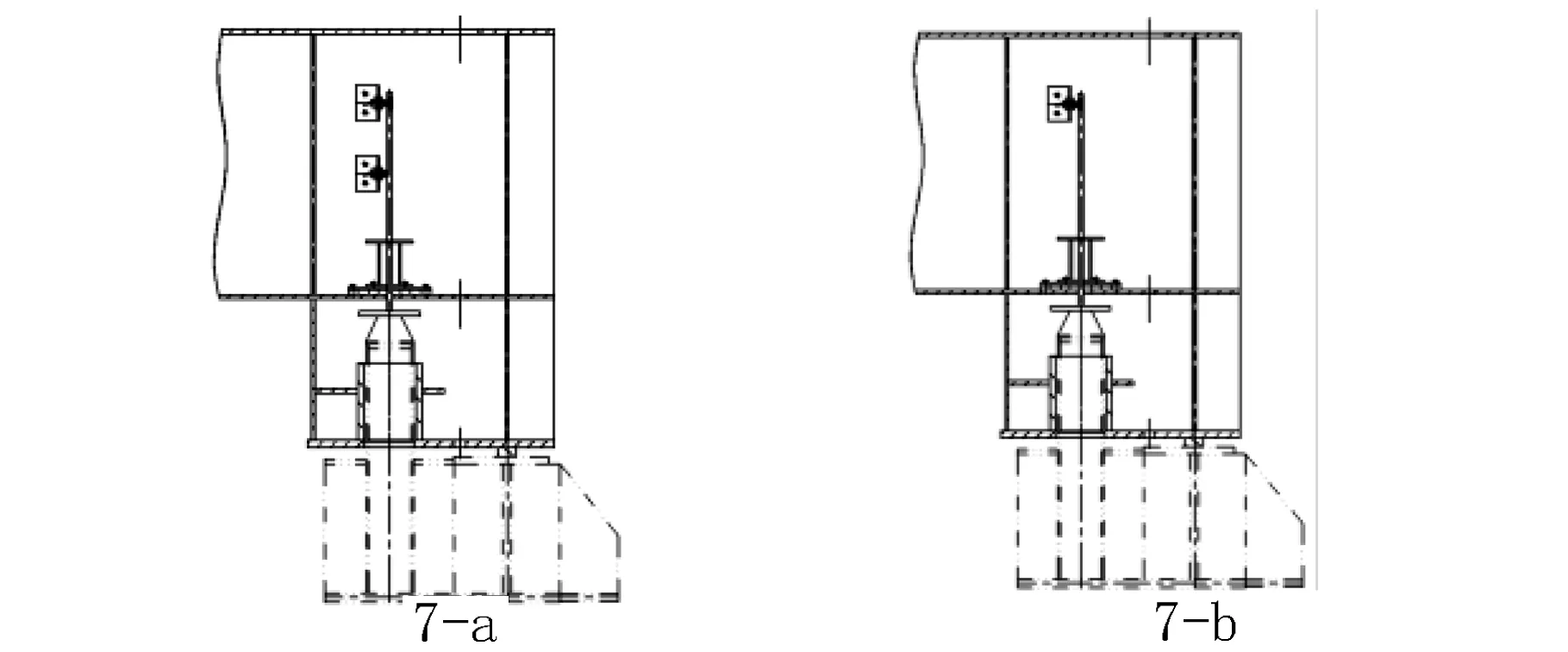
图7 到位信号装置示意图
4 液压自动抓梁三维快速建模
4.1 三维快速建模的方法
通过液压自动抓梁三维参数化设计,可以实现三维快速建模。其主要流程为:输入参数→ilogic读取参数→驱动子部件模型→驱动总装配模型→图纸输出,三维快速建模流程见表5。
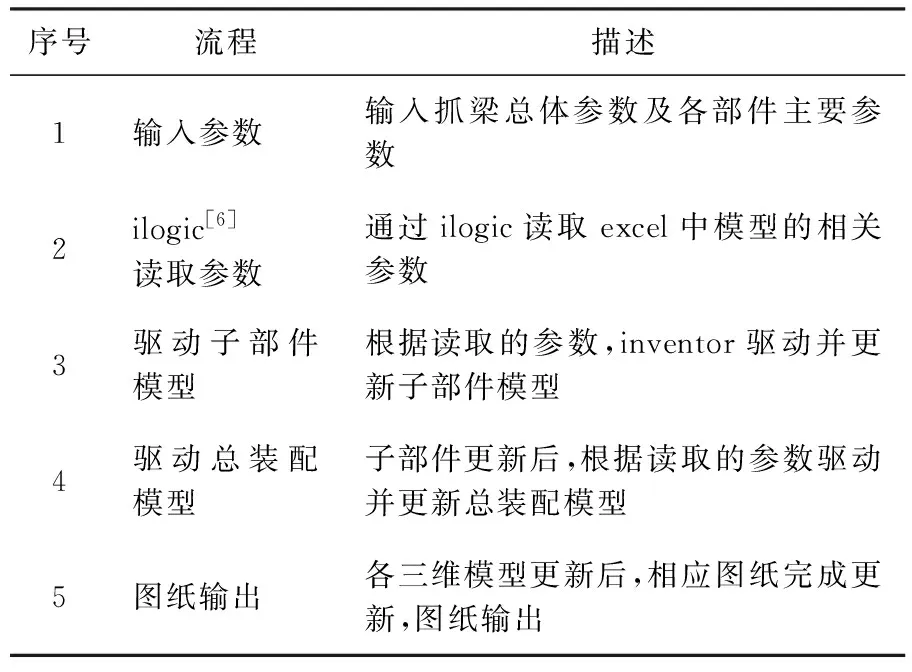
表5 三维快速建模流程表
4.2 应用实例
目前修建的水电站中的启闭机多数都设置有抓梁,有的甚至设置了多个抓梁。为了有效提高设计工作的效率,对抓梁进行了模块化、参数化设计。现已对以下水电工程:乌东德2×2 000 kN抓梁、巴基斯坦卡洛特2×1 600 kN及2×800 kN抓梁、赞比亚下凯富峡1 250 kN抓梁、汉江孤山2×2 500 kN、2×2 000 kN和2×1 600 kN抓梁、贵州平寨2×630 kN、2×500 kN和2×400 kN抓梁、尼日利亚宗格鲁2×1 600 kN和2×500 kN抓梁等进行了模块化、参数化设计。
5 结 语
对液压自动抓梁模块化及三维参数化快速建模设计进行了分析与研究,按模块化、参数化、系列化、标准化设计要求形成了液压自动抓梁模块化设计方案,并通过参数驱动实现了液压自动抓梁三维参数化快速设计,提高了设计水平和效率,主要研究工作取得了以下结论:
(1)液压自动抓梁的设计需要满足模块化和参数化快速设计建模的要求,应采用“自顶向下”的设计方法, 即设计思路是从“总体设计”到“模块设计”。
(2)基于液压自动抓梁必须适应门槽约束的要求,应先建立启闭机、门槽及闸门的三维约束架构和主轴线架构,确保总体模型主轴线和约束边界清晰,并按产品设计参数和三维约束架构建立安装坐标系,布置各个模块的安装位置。
(3)模块化总体设计规划过程中,应针对关键部件进行系列化、标准化设计,为提高产品的可靠性和参数化设计打下良好的基础,如导向装置、梁体结构、主电缆插头、穿销装置及液压泵站(含接线箱)等的专项改进设计。
(4)通过液压自动抓梁模块化、参数化设计技术的应用,该产品在制造成本、设计周期、快速响应以及可靠性等方面得到了明显的提升。
猜你喜欢
低温与特气(2022年2期)2022-11-26
机械制造(2022年3期)2022-04-07
中国军转民(2021年11期)2021-12-13
现代装饰(2020年5期)2020-05-30
汽车与新动力(2019年5期)2019-11-07
汽车零部件(2019年7期)2019-08-16
民用飞机设计与研究(2019年2期)2019-08-05
科技风(2018年6期)2018-10-21
凿岩机械气动工具(2017年3期)2017-11-22
中国核电(2017年2期)2017-08-11