
对汽车车轮动平衡检测数据的校验评价
2021-11-19 17:37张建刚
装备维修技术 2022年2期

摘 要:随着我国汽车行业的飞速发展和汽车技术水平的提高,对驾驶汽车时多重路况,以及行驶速度变换要求越来越高,车轮不平衡对汽车安全性能的影响也越来越大,车轮不平衡质量产生的不平衡力的大小和方向在不断变化,一是整车有上下跳动的趋势,引起垂直方向的振动,影响汽车行驶平稳性,二是引起转向轮横向摆动,影响汽车操纵稳定性和行驶安全。更严重的还会造成轮胎、转向及传动系统零部件的冲击和磨损,缩短使用寿命。因此,汽车使用一段时间后,一定要对车轮进行动平衡检测,测出不平衡质量和相位,并对其校正。国家对车辆的行驶中,要求人员财产安全的保障越来越提到较高的范畴,为确保车轮动平衡机检测出的数据准确可靠,依据JJF1151—2006《车轮动平衡机校准规范》对各汽修企业以及4S店在用的车轮动平衡机数据校准,校验。
关键词:车轮;轮动平衡;检测;校验
1 汽车车轮动平衡机的工作原理
1.1车轮静平衡和车轮静不平衡
车轮静平衡是一种理想的状态,要求车轮质心与其几何、旋转中心重合。简单的检验方法是:支起车轮,将轮轴调至水平,调整好轮毂轴承的松紧度,用手轻转车轮,待其自然停转,此时在车轮离地最底点做一个记号。重复试验多次,如果每次离地最底点相同,证明车论存在静不平衡。如果每次试验自然停转位置各不相同,则证明车轮是静平衡。
在实际生活中,不论是新制造的还是使用中的车轮都存在车轮静不平衡和动不平衡问题,这就需要我们利用车轮动平衡机对车轮不平衡质量及相位的大小进行测试,并对车轮不平衡点的不平衡量予以校正。
对于静不平衡车轮,其车轮质心与其几何、旋转中心不重合,车轮旋转过程中在不平衡点产生惯性离心力,现将车轮逆时针旋转360°分析各点惯性离心力的情况,假设车轮的几何、旋转中心为O点(即坐标原点),不平衡点的坐标为(r,θ)r是不平衡点的质量距车轮的几何、旋转中心的距离,θ不平衡点与x轴的夹角,不平衡点的质量为m,车轮旋转角速度为ω,车轮转速为n,ω=2πn,离心力的方向与车轮的切线垂直。根据圆周运动离心力F=4π2mm2,可以看出,离心力F与车轮转速n、不平衡点的质量m、不平衡点的质量距车轮的几何、旋转中心的距离r成正比。离心力F可分解为水平分力Fx=Fcosθ和垂直分力Fy=Fsinθ。在车轮旋转一周中,垂直分力Fy=Fsinθ有两次落在通过车轮中心的垂线上,一次在θ=90°,一次在θ=270°,方向相反,均达到最大值,使车轮上下跳动,引起车轮摆振。水平分力Fx=Fcosθ有两次落在通过车轮中心的水平线上,一次在θ=0°,一次在θ=180°,方向相反,均达到最大值,使车轮前后窜动,造成前轮摆振。当左、右轮的不平衡点的质量相互处于180°位置时,前轮摆振最为严重。
1.2车轮动不平衡
静平衡的车轮在高速旋转时可能产生不平衡转矩,出现动不平衡,使车轮产生摆振。在车轮的A、B两平面内,有两不平衡点,作用半径相同(r),相位相反(θ、θ+180°)的两质点m1、m2, 车轮是静平衡的。当车轮旋转时,两质点产生的离心力形成力偶,使车轮处于动不平衡。如果车轮是转向轮,那么在力偶的作用下转向轮就会绕主销左右摆动。如果在m1、m2同一作用半径(r)的相反方向(θ+180°、θ)上配上相同质量的m'1=m1、m'2=m2,形成一个与m1、m2,相反方向的平衡转矩,此时的车轮处于动平衡状态,经过以上分析可知:静平衡的车轮不一定是动平衡的,但动平衡的车轮一定是静平衡的,因此,国家对车轮必须进行动平衡检测,以确保车辆行驶安全。
1.3车轮动不平衡检测方法
(1)静不平衡
安装在特制平衡轴或平衡机转轴上的车轮,如果不平衡,在自由转动状态下,其不平衡点处于最下面的位置才能保持静止状态,给车轮不平衡点配重平衡后,车轮停于任一位置。利用物体平衡原理,可测得车轮的静不平衡点的质量和相位。
车轮平衡机检测车轮静不平衡的原理就是支承离地面的车轮如果不平衡,车轮转动时产生的上下振动通过转向节或悬架传递给检测装置的传感磁头、可調支架和底座内的传感器。传感器变成的电信号控制频间灯闪光,以指示车轮不平衡点位置,并由输入指示装置指示不平衡质量和相位。
(2)动不平衡
现在以硬支撑平衡机为例来分析离车式车轮动平衡机的工作原理,硬支撑是指支撑刚度很大,车轮支撑系统振动很小,车轮的惯性力可以略去不计。
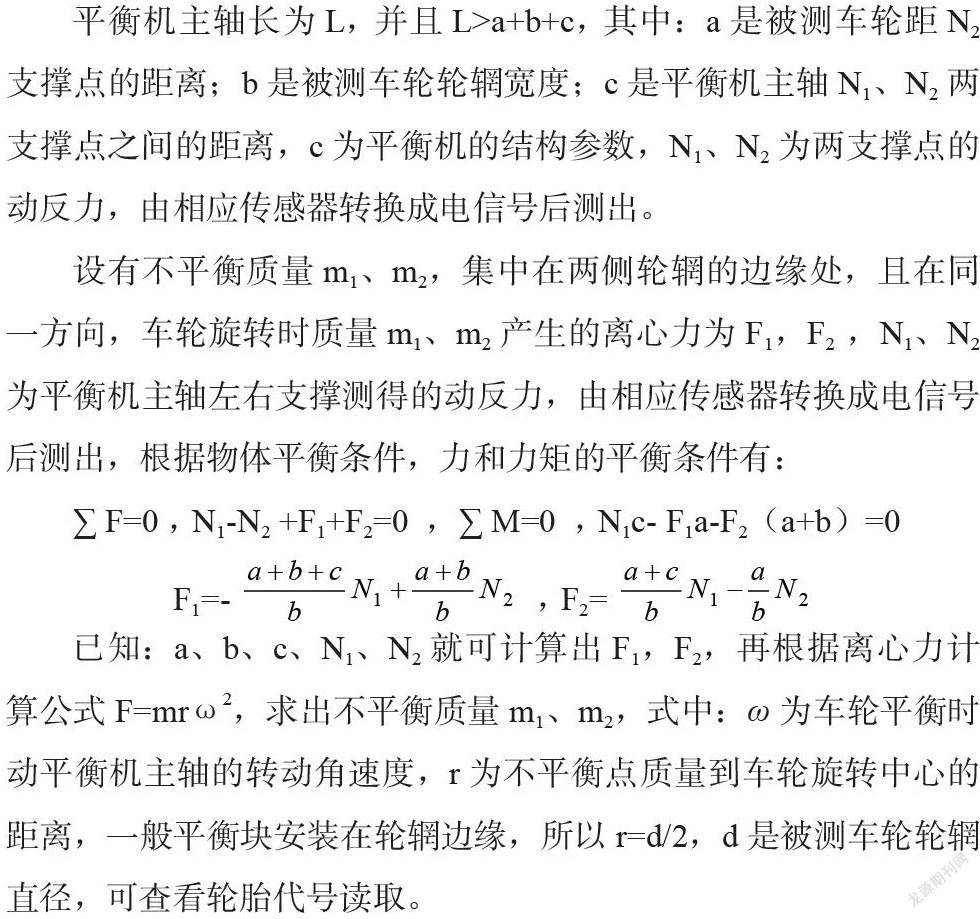
平衡机主轴长为L, 并且L>a+b+c, 其中:a是被测车轮距N2支撑点的距离;b是被测车轮轮辋宽度;c是平衡机主轴N1、N2两支撑点之间的距离,c为平衡机的结构参数,N1、N2为两支撑点的动反力,由相应传感器转换成电信号后测出。
设有不平衡质量m1、m2,集中在两侧轮辋的边缘处,且在同一方向,车轮旋转时质量m1、m2产生的离心力为F1,F2 ,N1、N2为平衡机主轴左右支撑测得的动反力,由相应传感器转换成电信号后测出,根据物体平衡条件,力和力矩的平衡条件有:
已知:a、b、c、N1、N2就可计算出F1,F2,再根据离心力计算公式F=mrω2,求出不平衡质量m1、m2,式中:ω为车轮平衡时动平衡机主轴的转动角速度,r为不平衡点质量到车轮旋转中心的距离,一般平衡块安装在轮辋边缘,所以r=d/2,d是被测车轮轮辋直径,可查看轮胎代号读取。
2 动平衡机标准器校验转子和试重砝码应改进
2.1标准校验转子
在实际使用动平衡机对车轮作动平衡试验时,动平衡机检测出来不平衡点的相位是(0~360)°任意一点,为提高动平衡机相位的校准能力,应将校验转子的A、B校正平面轴向的12个螺孔(相位差30°)设计成360°任意一点。
2.2试重砝码
首先应熟悉每个试重砝码(5g、10g、20g、30g、40g、50g、60g、80g、100g、120g)几何形状是由大圆柱和小圆柱质量构成,其中小圆柱带丝扣为拧在校验转子上。设试重砝码的质心与它的几何中心重合,当试重砝码不论加在A或B校正平面上,还是加在A或B非校正平面上,都会影响校准结果。
现在来分析:以试重砝码加在A校正平面上为例,进行受力分析,A校正平面的质心与几何中心重合为O点,当动平衡机以角速度ω旋转时,试重砝码产生离心力,其方向由O点指向试重砝码的质心并与A校正平面的夹角为α,离心力为F与主轴不垂直,离心力可分解成两个分力,一个垂直于主轴分力Fcosα;一个沿主轴方向分力Fsinα,该分力会影响动平衡机的校准结果,只要α=0°时,Fsinα=0,沿主轴方向分力为零,才不会影响动平衡机的校准结果。
如将每个试重砝码的几何形状设计成两个大小一样的圆柱形并自带螺口,两个圆柱形组合在一块就成为一个圆柱形砝码,将该试重砝码加在A校正平面上时,试重砝码的质心与A校正平面的质心在同一平面上,即α=0°,沿主轴方向分力为零,这样设计试重砝码形状结构就不会影响动平衡机的校准结果。
参考文献:
[1] 杨静芳. 轮胎动平衡在线检测试验机研制及其关键技术研究[D]. 山东:山东大学,2015.
[2] 王洪,彭熙伟,李占宏,等. 基于FFT的车轮动平衡检测技术[J]. 北京理工大学学报,2002,22(3):300-302.
作者简介:
张建刚(1964.01—),男,汉,籍贯:内蒙古自治区省呼和浩特市人,大学本科,现职称:工程师,研究方向:企业评价及汽车召回。
猜你喜欢
中学生学习报(2022年15期)2022-04-17
机电工程技术(2021年3期)2021-09-10
数学大王·低年级(2021年2期)2021-02-21
求学·文科版(2019年3期)2019-03-30
小猕猴智力画刊(2018年7期)2018-08-08
电脑知识与技术·经验技巧(2017年9期)2018-02-24
电脑爱好者(2017年12期)2017-06-30
时代英语·高一(2016年6期)2017-02-27
中学生数理化·七年级数学人教版(2016年10期)2016-12-22
中学生数理化·七年级数学人教版(2016年10期)2016-12-22
