倾转旋翼-机翼气动干扰准定常多重参考系仿真和风洞试验
2021-11-23 14:48杨海涛胡淑玲马武举
科学技术与工程 2021年32期
杨海涛, 夏 巍, 帅 超, 胡淑玲, 马武举
(1.中国船舶集团有限公司宜昌测试技术研究所, 宜昌 443000; 2.西安交通大学机械结构强度与振动国家重点实验室, 西安 710049)
倾转旋翼飞机可在直升机飞行模式和固定翼飞机飞行模式间转换飞行,具有更大的飞行包线和更广阔的应用范围,但在转换飞行时引入了过渡飞行模式[1-3]。过渡飞行模式是衔接悬停和巡航两个典型状态的特殊飞行模式。在过渡飞行模式,前方来流风速的大小和旋翼旋转轴向均发生较大变化,且旋翼与机翼间存在强烈的气动干扰,导致倾转旋翼飞机的升力、推力随着旋翼倾角的变化而发生较大的变化[4]。开展倾转旋翼对机翼的气动干扰研究,对揭示干扰流动机理和减轻干扰问题具有重要实际意义。
倾转旋翼-机翼间的气动干扰研究主要包括试验和数值仿真两类。试验方面,郭剑东等[5]针对带短舱的小型倾转旋翼机开展全包线吹风试验,研究了旋翼/机翼/襟副翼间的气动干扰,以及总距、副翼和升降舵的操纵功效。Chinwicharnam等[6]针对倾转旋翼-机翼同时倾转模型开展风洞试验研究,得出了倾转旋翼的滑流会改变机翼附面层的气流分离,可提高机翼升力并使机翼的失速迎角增大结论。数值仿真方面,Sugawara等[7]使用rFlow3D求解器研究了前飞状态旋翼与机翼间的气动干扰,并与单旋翼和单机翼气动特性比较,发现在高前进下旋翼-机翼模型的阻力增加20%。闫文辉等[8]首先利用动量-叶素理论分析了倾转旋翼的最佳推进效率,然后利用结合数值仿真结果和Lowson方法研究了桨叶的辐射噪声,分析了倾转旋翼噪声对飞行员工效的影响。Potsdam等[9]基于运动嵌套网格对“鱼鹰”V-22倾转旋翼飞机缩比模型进行计算流体力学(computational fluid dynamics,CFD)数值仿真研究,得出倾转旋翼和机翼之间容易出现喷泉效应的结论。李鹏等[10-12]采用CFD方法研究了典型状态旋翼-机翼间的气动干扰,悬停状态出现喷泉效应,旋翼拉力系数降低;倾转过渡状态,旋翼拉力在倾角45°前下降较快。孙凯军等[13]基于运动嵌套网格技术,分析了悬停状态不同襟副翼舵面预置角对倾转旋翼气动特性的影响。目前针对倾转旋翼与机翼间的气动干扰研究主要集中在悬停和前飞状态,倾转过渡状态较少。倾转状态下旋翼-机翼间的气动干扰复杂,有很多问题还未揭示清楚(倾转过程机翼出现负升力)。负升力导致倾转状态倾转旋翼飞机极易掉高度飞行,影响倾转旋翼飞机的平稳安全飞行,迫切需要开展倾转过程中旋翼-机翼系统的升阻特性研究。
针对小型倾转旋翼飞行器的倾转旋翼-机翼系统开展变倾角气动特性风洞试验和CFD数值仿真分析,研究不同前飞速度和旋翼转速下倾转旋翼对机翼气动特性的影响。首先,基于多重参考系方法建立倾转旋翼-机翼数值仿真模型;同时搭建倾转旋翼-机翼风洞试验平台,研究倾转旋翼对机翼气动特性的影响。研究结果可为倾转旋翼飞行器设计和倾转过渡状态稳定飞行提供气动参数。
1 数值计算方法
1.1 MRF计算方法
倾转旋翼-机翼气动干扰数值仿真基于多重参考系(multiple reference frame,MRF)方法。多重参考系方法是近似稳态的方法[14-15],基本思想是:将计算域划分为多个静止域和旋转域,静止域和旋转域中的气动力参数在各自控制方程中计算。在旋转域的控制方程中添加转子角速度项,转子与旋转域无相对转动速度。在静止域和旋转域间创建交界面,旋转域和静止域在交界面上基于通量守恒进行流动参数交换。针对倾转旋翼-机翼数值仿真模型,机翼处在静止域,旋翼处在旋转域,计算域如图1所示。

图1 计算域Fig.1 Computational zone
控制方程采用旋转坐标系下的雷诺平均N-S(Navier-Stokes)方程,可表示为[16]

(1)
式(1)中:t为时间,Ω为控制体体积;S为控制体表面;U为守恒量矢量;FI为无黏通量;FV为黏性通量;ST为源项。
1.2 网格与边界条件
在倾转旋翼-机翼气动干扰模型,计算域入口直径为旋翼旋转平面直径11倍,旋转域直径为旋翼旋转平面直径1.05倍。对静止域和旋转域均绘制四面体非结构化网格,旋转域网格节点数目为3.8×106,静止域网格节点数目为3.2×106。在旋翼表面和交界面位置创建棱柱加密网格,加密层数为4,旋翼表面网格如图2所示。在ICEM-CFD中对静止域和旋转域的网格进行组装。

图2 旋翼表面网格Fig.2 Surface mesh of rotor
数值仿真边界条件采用速度入口和压力出口,入口速度大小分别设置为3、6、9、12 m/s,流体介质为海平面空气,空气密度为1.225 kg/m3;出口压力大小与环境压力一致为101.325 kPa。旋翼和机翼为无滑移壁面。为了考虑旋翼旋转引起流动剪切效应,湍流模型采用基于的剪应力传递(shear stress transfer,SST)湍流模型[17],湍流方程的离散采用二阶迎风格式,当计算残差小于1×10-4时认为迭代收敛。
1.3 C-T算例验证
验证本文方法的正确性,在Ansys-Fluent中对Caradonna-Tungs[18]提供的悬停模型进行数值仿真分析,并与试验结果对比。C-T悬停模型中桨叶无弯无扭,桨叶片数为2,截面为NACA0012翼型,桨叶安装角8°,桨叶半径(1.032 m)与叶素弦长比为6。图3为数值仿真得到桨叶在转速1 250、2 050、2 500 r/min工况下的拉力系数,同时给出了拉力系数CT试验结果,旋翼拉力系数仿真结果与试验结果吻合较好,最大偏差不超过0.438%。

图3 C-T模型拉力系数Fig.3 Thrust coefficient of C-T benchmark
1.4 8038旋翼算例验证
在低速风洞试验室搭建了旋翼吹风试验平台,如图4所示。旋翼通过旋翼支架与测力天平相连接,旋翼旋转平面紧邻风洞出风口。测量了8038标准旋翼(桨盘直径20.32 cm,旋翼桨距9.652 cm)前飞状态(旋翼旋转平面与前方来流方向垂直)下的拉力,前方来流风速3~12 m/s,旋翼最高转速不超过9 400 r/min(最大桨尖马赫数为0.28,低于0.3)。
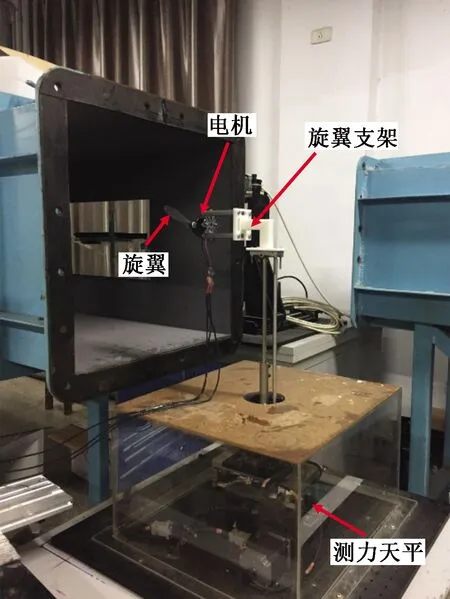
图4 旋翼测试平台Fig.4 Rotor test platform
开展了8038旋翼前飞状态数值仿真研究,边界条件采用速度入口和压力出口,入口速度3~12 m/s,出口压力为101.325 kPa。图5中绘制了前飞状态下8038旋翼的拉力风洞试验结果和数值仿真结果,数值仿真结果和试验结果吻合较好。风洞试验和数值仿真均发现:在来流风速高,旋翼转速低时,旋翼的拉力为负值。此时旋翼的前进比小,旋翼进入“风车状态”[19],此时旋翼旋转产生的是阻力。

图5 前飞状态旋翼拉力Fig.5 Rotor thrust in forward flight
2 风洞试验平台
在西安交通大学低速风洞实验室搭建了图6所示的旋翼-机翼气动干扰试验平台,获得了不同倾转角和旋翼转速下机翼的升力。旋翼倾转角由舵机控制,试验时旋翼可从悬停状态倾转至前飞状态,前飞状态旋翼倾角α为90°(旋翼旋转平面与前方来流方向垂直)。旋翼转速通过磁电传感器测量,风洞实验室配备的天平可测量机翼升力。风洞试验段尺寸0.5 m×0.5 m,风洞湍流度为0.03%,风洞最高吹风速度可达20 m/s。

图6 风洞试验平台Fig.6 Wind-tunnel test platform
在倾转旋翼-机翼气动干扰模型中,旋翼为8038标准旋翼;机翼为等截面矩形翼,机翼弦长c为10 cm,机翼展长l为40 cm,截面翼型为B-29 TIP,机翼迎角为6°。旋翼与机翼的相对位置关系如图7所示,旋翼旋转中心位于机翼中间对称截面,旋翼旋转中心与机翼前缘处在同一高度,旋翼旋转中心距机翼前缘的距离d为15 cm,旋翼倾转中心与旋翼旋转中心重合。

L为机翼升力,N;D为机翼阻力,N;T为旋翼拉力,g;α为旋翼倾角图7 位置示意图Fig.7 Schematic of relative position
3 准定常倾转旋翼-机翼的气动干扰
3.1 前飞状态机翼气动特性
前方来流风速、旋翼转速均会影响机翼气动特性,开展变前进比研究不同倾转角下机翼气动特性,定义前进比λ为

(2)
式(2)中:v为前方来流风速,m/s;ns为旋翼转速,r/min;d′为旋翼直径,d′=0.203 2 m。
试验得到前方来流风速3~12 m/s,旋翼不同转速下机翼的升力系数。同时展开了数值仿真研究,得到机翼的升力系数和阻力系数。机翼升力系数CL、机翼阻力系数CD可分别表示为

(3)
(4)
式中:ρ为空气密度,取值1.225 kg/m3。
图8中绘制了前飞状态倾转旋翼-机翼气动干扰模型中机翼的升力系数和阻力系数。结果表明,随着前进比的增加,机翼升力系数和阻力系数均降低;且前进比越小,前进比-机翼气动力系数曲线下降越快。图8中同时绘制了单机翼的升力系数和阻力系数数值仿真结果,在前进比较大时,倾转旋翼-机翼气动干扰模型中机翼的升阻特性与单机翼的升阻特性相同。是因为随着前进比的增加(旋翼转速降低),旋翼旋转对气流的加速作用减弱,旋翼对机翼气动特性的影响降低。数值仿真未考虑旋翼安装支架、天平支撑结构对倾转旋翼-机翼流场的阻塞影响,数值仿真结果和试验结果存在略微的偏差。

图8 前飞状态机翼气动特性Fig.8 Aerodynamic performances of wing in forward flight
3.2 倾转状态机翼气动特性
图9绘制了前方来流3、6、9 m/s,不同倾角下机翼升力系数的风洞试验结果。试验结果表明:旋翼倾角90°(前飞状态)时,机翼升力系数随着前进比的增加而减小;当旋翼倾角小于75°,机翼升力系数随着前进比的增加而增大。在前进比较小时,倾角越大机翼升力系数越大。倾转角对机翼升力系数的影响随着前进比的增大而减小,当前进比无限大时(旋翼转速趋近零),旋翼倾转不会影响机翼气动特性。试验发现在前进比较小时机翼升力系数为负值。在图9(b)中同时绘制了机翼升力系数数值仿真结果,数值仿真结果与试验结果有偏差,但前进比-机翼升力系数曲线在不同倾角下的变化趋势相同。数值仿真结果与风洞试验结果存在偏差的原因:①当旋翼倾角小且转速高时,由于风洞洞壁限制,旋翼滑流超出了风洞吹风边界,如图10所示;②数值仿真未考虑电机、机翼安装平台和天平支架对旋翼-机翼气动干扰系统流场阻塞的影响。

图9 不同风速下机翼升力系数Fig.9 Lift coefficient of wing in different velocity
数值仿真得到倾转旋翼-机翼气动干扰模型在前方来流6 m/s,倾转角分别为15°和75°,旋翼转速分别为3 000 r/min(λ=0.591)和9 000 r/min(λ=0.197)时,沿着流向截面的压力云图和流线分布,如图11所示。倾转旋翼改变了前方来流方向,来流方向改变的大小与旋翼倾角和前进比有关。固定旋翼倾角,当前进比降低(旋翼转速增加),倾转旋翼对前方来流方向改变的能力增强,旋翼旋转使前方气流流入机翼下方,机翼下方为低压区,上方为高压区,机翼产生负升力,机翼升力系数降低。固定前进比,倾角越小气流流向改变越明显,机翼升力系数越低。

α1为倾转旋翼小倾角状态,接近悬停状态; α2为倾转旋翼大倾角状态,接近前飞状态图10 风洞吹风示意图Fig.10 Schematics of wind tunnel
3.3 倾转旋翼-机翼系统气动力
倾转过程中旋翼的拉力,机翼的升、阻力均随倾角的改变而发生变化,建立图7所示的x-y坐标系,倾转旋翼-机翼系统的合力Fx、Fy可分别表示为
Fx=-Tsinα+D
(5)
Fy=Tcosα+L
(6)
式中:T为旋翼拉力,g。
数值仿真得到来流风速分别为6 m/s和12 m/s,旋翼转速分别为4 000、6 000、8 000 r/min时,倾转旋翼-机翼系统沿着x方向与y方向上的合力,计算结果如图12所示。针对倾转旋翼-机翼气动布局形式,固定来流风速下,旋翼转速越高前飞方向上的合力越大;固定旋翼转速下,来流风速越高x向合力越大,且风速12 m/s与风速6 m/s间x向合力的差值随着倾角的增加而增大。在y向(升力方向),当旋翼倾角低于60°时,升力方向力的大小主要与旋翼转速有关,旋翼转速越高升力方向气动力越大,倾转旋翼飞机的气动力类似直升机;当旋翼倾角高于60°时,升力方向力的大小主要与前方来流风速有关,来流风速越高升力方向气动力越大,倾转旋翼飞机的气动力类似固定翼飞机。本文算例,在前方来流12 m/s,旋翼倾角75°,旋翼转速从4 000 r/min增加至8 000 r/min升力方向气动力仅增大10.3%。
4 结论
建立了倾转旋翼-机翼的CFD数值仿真模型,搭建了倾转旋翼-机翼气动干扰风洞试验平台,分析了倾转旋翼对机翼气动特性的影响,得出如下主要结论。
(1)多重参考系方法适用于旋翼气动力计算。本文针对C-T模型和8038标准旋翼分别开展了悬停和前飞状态数值仿真验证,数值仿真结果与试验结果吻合良好。
(2)前飞状态,机翼的升力系数和阻力系数在前进比较小时下降较快,随着前进比的增大机翼的升阻特性与单机翼升阻特性一致。
(3)倾转过渡状态,当旋翼倾角小于75°,机翼升力系数随着前进比的增加而增大。在前进比较小时,机翼升力系数为负值且倾角越大机翼升力系数越大。
(4)倾转旋翼飞机在倾转过渡状态,从避免飞机掉高度的角度考虑,在倾角较小时需要增大旋翼转速;倾转一定角度后固定旋翼倾角,当前飞速度较高后完成后续倾转过程。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
能源工程(2022年2期)2022-05-23
可再生能源(2021年7期)2021-07-26
火箭推进(2020年1期)2020-03-06
科学Fans(2019年4期)2019-04-30
燃气涡轮试验与研究(2018年3期)2018-12-09
空气动力学学报(2018年2期)2018-04-25
北京航空航天大学学报(2017年1期)2017-11-24
北京航空航天大学学报(2016年9期)2016-11-16
北京航空航天大学学报(2016年5期)2016-11-16