大型抓斗式挖泥船现状及发展趋势
2021-11-26 23:54聂雨萱NIEYuxuan
建筑机械化 2021年11期
聂雨萱/NIE Yu-xuan
(郑州大学国际学院,河南 郑州 450000)
随着国民经济的持续稳定发展,近年来中国跨海桥梁建设海底平整作业也迎来了勃勃生机,跨海桥梁建设海底平整作业装备制造业开始走上自主创新、做大做强的发展阶段。中国跨海桥梁建设海底平整作业设备一方面向国外购买先进的大型装备,另一方面倾力打造国产大型装备。21世纪以来,为积极应对国内外跨海桥梁建设海底平整作业的严峻挑战,着手研究开发大型耙吸船和大型绞吸船,创出了一条“引进、消化、吸收、再创新”的高科技平台和低成本扩张相结合的装备之路。与此同时,随着电子信息技术迅速发展,其在跨海桥梁建设海底平整作业的应用也越来越广泛,促使跨海桥梁建设海底平整作业技术设备不断更新,跨海桥梁建设海底平整作业船舶则向大型化、自动化方向发展,目前在中小型河道跨海桥梁建设海底平整作业装备上,从结构设计、定位与测量技术方面基本保持了和国际先进水平同步,但是斗容量18m3以上的大型抓斗式挖泥船装备基本是进口日本等国的设备(表1、图1),不仅价格高,还容易受到技术及供货周期的制约,且这类装备中的抓斗挖泥驱动方式主要为柴油机—液力变矩器的液力驱动或柴油机—直流电机方式,整机价格昂贵,控制软件也受制于人,应用上具有一定局限性。而国内开发的具有智能化、高端技术应用的大型跨海桥梁建设海底平整作业设备与国外产品尚有一定差距。随着国内跨海桥梁建设海底平整作业进一步对外开放,国际竞争力度进一步加大。中国政府将逐步下调工程机械的关税,这样,在中国人民币汇率基本稳定的前提下,国外跨海桥梁建设海底平整作业公司工程施工的成本价格将不断降低,在中国跨海桥梁建设海底平整作业的竞争力也将逐步增强,这将对中国跨海桥梁建设海底平整作业带来强大的冲击,因此迫切需要国内研发和制造企业在此项目上形成重大技术创新和突破,最终实现大型跨海桥梁建设海底平整作业设备的国产化、规模化和产业化,突破国外同类产品的技术壁垒,逐步替代目前完全由国外进口的同类产品,提高我国船舶工业在该领域的自主创新能力和竞争力。
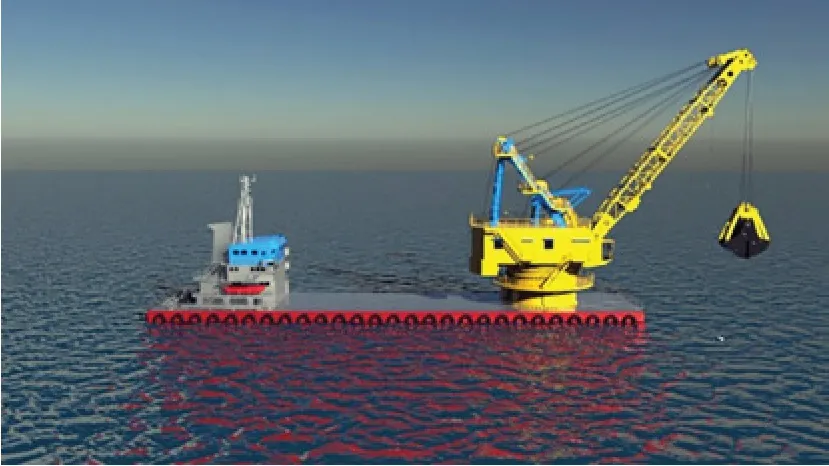
图1 抓斗挖泥船工作模拟图

表1 国内目前使用抓斗式挖泥船情况
1 抓斗挖泥船的市场情况分析及结构组成
目前,内河航运发展已上升为国家战略。2020 年全国要建成1.9 万km 高等级航道,长江等内河主要港口和部分地区重要港口建成规模化、专业化、现代化港区,长江及其他主要内河航道等级要普遍提高。同时由于我国水环境污染日益严重,与水利跨海桥梁建设海底平整作业密切相关的环保跨海桥梁建设海底平整作业需求也不断增长,预计未来几年,我国环保跨海桥梁建设海底平整作业将迎来较好的发展机遇。截至2016 年2 月底,全球挖泥船船队保有量为1 978艘、446.5 万总吨,平均船龄为29.7 年。20 年以上高船龄挖泥船达1 362 艘,占挖泥船船队运力总艘数的68.9%。挖泥船普遍拆解年限在35 年左右,目前全球挖泥船船队中,船龄35 年以上的老龄船舶达到766 艘,存在较大的更新需求。
抓斗挖泥船工作部分结构如图2 所示,是抓斗挖泥船的关键,其起升及运行部件三维结构如图3 所示。

图2 抓斗挖泥船工作部分三维结构设计图

图3 抓斗挖泥船工作部分起升及运行设计图
2 大型抓斗挖泥船国内外技术现状
国外发达国家大规模进行港口和海洋开发,是发生在20 世纪六七十年代,因此采用的大型抓斗挖泥船主要的驱动控制技术也源于该段时间的研究实践。这类装备中的抓斗挖泥驱动方式主要为柴油机—液力变矩器的液力驱动或柴油机—直流电机驱动两种方式。
采用柴油机—液力变矩器的液力驱动方式特点是:液力变矩器带奥美佳离合器。其驱动方式为:柴油机—液力变矩器—减速机—开式齿轮—离合器—卷筒—钢丝绳。柴油机—液力变矩器驱动方式的优点是,它能在抓斗闭合时将柴油机的全部动力最大限度地传输到抓斗开闭机构这一侧,形成足够大的抓斗闭合力,最大闭合力矩可以达到额定工况的4 倍以上,有利于实现对各种土质的挖取作业。缺点是由于大功率的柴油机、液力变矩器及其控制系统必须依赖进口,整机价格昂贵,控制软件受制于人。采用柴油机—液力变矩器的液力驱动方式的挖泥船斗容量以18~30m3为主。
柴油机—直流电机驱动方式为:柴油机—发动机组—直流电机—减速器—开式齿轮—离合器—卷筒—钢丝绳。柴油机—直流电机驱动方式具有比较大的过载能力(3.5 倍)。虽然它略低于液力变矩器的过载能力,但也能够很好地满足抓斗挖泥船的各种作业工况要求。柴油机—直流电机驱动方式自动化程度较高,控制精度较高,但规格直流电源和直流电机的购置成本高,设备配套相对困难,且存在设备运营的维护技术要求高和维护成本也偏高的缺点。直流电机驱动方式主要在更大容量(30~50m3)的抓斗挖泥船上采用。
3 大型抓斗挖泥船国内外技术应用趋势
从目前的发展趋势看,随着交流变频技术在起重机产品中的广泛使用,特别是大功率的交流变频技术的发展,采用柴油发电机组供电、交流变频驱动与PLC 控制技术,经过一定的试验研究和优化设计,是可以实现液力变矩器驱动方式所能达到的所有功能和效果。交流变频电机的高可靠性使得系统工作的性能更加稳定,而且数字化程度控制使得控制的精度更高,便于实现自适应控制、智能化和可视化。在项目研究工程中,需要重点研究柴油机—液力变矩器驱动方式与交流变频器电机驱动的不同特性,特别是如何减少两种方式在过载能力等方面的差异,以有效提高交流变频驱动挖泥装备的抓斗闭合力,以实现对各种恶劣地质条件下挖掘工况的自适应性,使抓斗水下挖泥性能达到已有国外同类产品水平,进而打破国外同类产品的专利技术壁垒。
3.1 交流变频驱动技术应用
大型抓斗挖泥船装备交流变频驱动系统的过载性和复杂载荷适应性技术:抓斗挖泥船在水下作业的工况复杂、负载变化大,对驱动系统的过载能力和主动适应性要求高。目前过外产品主要采用的柴油机—液力变矩器液力驱动和柴油机—直流电机驱动型式,过载能力较强(3~5 倍),其特点和问题如表2 所示。虽然变频电机驱动具有一定的过载能力(2.1~3.2 倍),但针对抓斗在水下复杂地质环境的过载性能、控制性能及可靠性等,尚未经过科学论证和系统的理论、实验研究,到目前为止国内外尚无应用的先例。在系统研发时,需要重点解决双卷扬机驱动系统中的能量分配自适应控制策略与算法等关键技术,采取力参数、速度参数、电参数综合采用和实时优化控制策略等技术,来应对这些极端的超载工况,从而解决交流变频驱动用于大型抓斗挖泥船装备的这一关键难题。

表2 进口挖泥船动力方式及特点
3.2 智能化和可视化技术应用
大型抓斗挖泥装备水下作业的智能化和可视化技术:抓斗水下工作环境复杂、恶劣,如何有效保障各种技术(地球定位系统GPS、地球信息系统GIS、海洋水文信息系统、水下超声波测深技术,基于神经网络的抓斗作业智能化控制算法)的使用性和精度,实现异构物理信息的数据融合技术和基于模糊神经网络的抓斗作业智能化控制算法是本项目需要解决的技术难点。电气控制系统及施工定位系统包含传感器,可实现数据采集并输入可视化系统,结合数据通信技术、计算机图形学、计算机程序设计和传感器技术,实现抓斗水下作业可视化,实时监测深度及开度状态,验证可视化系统工作的可靠性,如图4所示。

图4 抓斗式挖泥船可视化显示示意图
3.3 高精度平挖技术应用
大型抓斗挖泥船海底自动平挖控制技术:自动平挖是衡量抓斗挖泥船水下作业性能的一项重要指标,目前该技术长期由国外公司垄断。当前国际同类产品可达到±50cm 的水平挖掘精度,但这并不能满足国内某些大型海洋工程项目的要求,如港珠澳大桥平挖精度为±25cm 和航道工程的作业要求。目前的技术趋势是充分利用交流变频驱动控制系统的数字化精准控制特点,结合抓斗工作工程的物流仿真、力学分析和基于模糊神经网络的抓斗水下作业智能化控制算法等技术,实现抓斗的自动平挖功能,如图5 所示。航道和海底平挖作业的平挖控制精度预期达到±25cm,可超过现有国际同类产品的±50cm 水平精度,满足各类大型海洋工程和航道工程的作业要求。
3.4 智能控制技术应用
智能控制技术原理如图6 所示,采用西门子S7-300PLC 为核心,通过ProfiBus-DP 系统和变频器进行通讯连接,实现控制及故障检测保护。通过预先设计、编程的智能控制模型实现抓斗水下定深挖、平挖自动化控制,平挖精度可达±25cm,超过进口产品。
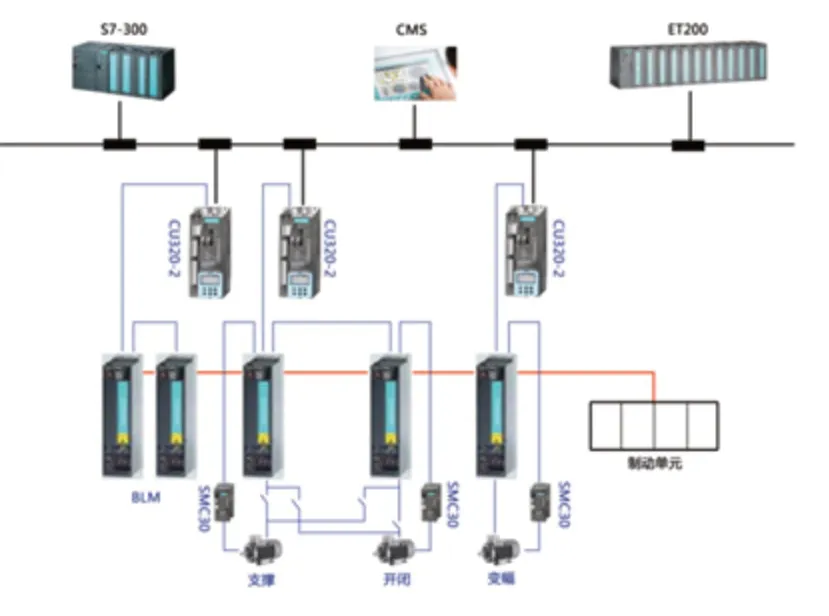
图6 智能控制方案
3.5 整机操作方便
采用PLC 控制,控制精度高,功能易于实现,减少控制手柄及踏板的数量,降低操作司机的劳动强度。平挖、定身挖均有手动和自动模式,控制精准(精度25cm),避免超挖现象。驾驶室采用2 个手柄、1 个脚踏板进行控制,操作简单,自动化程度高。
3.6 维护简便
整机采用交流变频共直流母线多传动控制系统,系统简单、可靠。控制采用ProfiBus-DP 总线系统,控制回路故障易于排查,方便检修,维护。起升机构、变幅机构均采用成熟可靠的卷扬系统,回转系统为电机驱动行星减速机系统,技术成熟、可靠,维护保养方便。
3.7 运营成本低、能耗低
电机组+变频电机驱动方案如图7 所示,由于采用柴油发电机组提供动力,进行动态响应,使柴油机工作在最佳效率曲线附近,提高燃油经济性。同时采用12 脉冲整流方案,消除二次谐波干扰,提升功力因数、传动效率。采用发电机组+电机驱动方案,整体效率达到75%,高出日本同类机型5%。

图7 电机组+变频电机驱动方案
4 结论
大型抓斗式挖泥船无论是结构设计、制造工艺、配套件在国内尚属于试制和实验阶段,国内由卫华集团有限公司与武汉理工大学在此项工作的研究已处于国内领先,相关项目已列入国家863 计划,并通过了科技部的验收,相信随着国家的重视和各项技术的深入研究开展,国产大型跨海桥梁建设海底平整作业设备与国外的差距会越来越小,在部分关键技术上会实现超越国外现有技术水平,从而为大型跨海桥梁建设海底平整作业设备国产化奠定良好基础。
猜你喜欢
——变矩器的锁止控制
汽车与驾驶维修(维修版)(2019年9期)2019-10-14
海峡姐妹(2018年8期)2018-09-08
中国港湾建设(2017年11期)2017-12-19
中国工程咨询(2017年5期)2017-01-31
汽车零部件(2016年10期)2016-12-06
工业设计(2016年7期)2016-05-04
船海工程(2015年4期)2016-01-05
汽车维修与保养(2015年12期)2015-04-18
电子设计工程(2014年18期)2014-02-27
城市道桥与防洪(2014年5期)2014-02-27