变化海流环境下AUV能量最优三维路径规划
2021-11-29 03:47李亚南黄海滨陈亮名庄宇飞王晓丽
系统工程与电子技术 2021年12期
李亚南, 黄海滨, 陈亮名, 庄宇飞,*, 王晓丽
(1. 哈尔滨工业大学(威海)信息科学与工程学院, 山东 威海 264209;2. 南洋理工大学机械与航天工程学院, 新加坡 639788)
0 引 言
近年来,随着海洋自主观测和数据收集设备的需求增加,海洋资源呈现出巨大价值,海洋的勘探和开发也越来越受到关注[1]。作为水下勘探的主要工具之一,自主水下航行器(autonomous underwater vehicle, AUV)具备高度的自主性和灵活性[2]。AUV在执行许多水下任务时都发挥着重要作用,例如沿海生态系统数据收集[3-5]、扫雷[6-8]、海底勘测[9-11]、通信中继[12-14]等。在上述任务背景中,AUV路径规划是最基本且最关键的问题之一[15]。因此,非常有必要研究AUV的路径规划问题。
对于AUV的路径规划问题,相关研究者提出了许多不同类型的算法,包括A*算法、快速探索随机树(rapidly-exploring random trees, RRTs)以及其他基于图搜索的水下路径规划算法。A*算法将路径规划问题转换为图搜索问题,文献[16]采用A*算法为滑翔机在海洋环境下规划了运动路径。虽然A*算法的执行效率高,但由于A*算法是一种启发式的算法,其无法保证所规划路径的全局最优性。RRTs算法广泛用于路径规划研究中,为了考虑航行器运动的方向性以及动态海流的影响,可以通过在RRTs中添加偏差的算法实现路径规划。尽管RRTs可以有效地对高维和非凸的空间进行搜索,但是其预测的路径通常不是最优的[17]。此外,动态海流的影响通常不能准确地被并入到RRTs的计算公式中。因此,RRTs不能很容易地适用于高精度和存在海流下的水下路径规划。图形搜索算法是在20世纪60~80年代之间提出的,已成功应用于许多实际任务中。然而,基于网格的图搜索算法获得的状态是离散的,因此限制了AUV在运动过程中的航向[18]。
上述算法存在的不足是不能获得全局最优路径,并且在考虑海流对路径规划的影响时不够精确。然而,很多应用需要获得最优路径,再加上海流广泛存在于海底,忽略海流的影响可能使所获得的结果难以应用于实际工程中。因此,考虑存在海流影响的情况下,开发既精确又有效的算法来规划路径并使所规划的路径满足所设定的优化指标,是很有研究意义和价值的[19]。
目前,为了获得航行器在水下环境影响下的最优路径,部分研究已经取得了一些进展。文献[20]采用并行群搜索算法研究了时变海流下的最优路径规划问题。Lolla等人在文献[21]中提出了一种用于获得水下最优运动路径的算法,该算法可以准确地描述动态环境海流对航行器运动的影响。此外,这项工作也已扩展到如何获得所需能量最少的路径[22]。文献[23]在多航行器任务分配的研究中,采用最优控制理论设计了一种海流影响下的路径规划算法。注意到,上述工作仅考虑了二维(two-dimensional, 2D)的运动环境,并将AUV的路径限定在恒定水深下。然而,海流的大小通常会随水深的变化而变化。因此,2D情况下的规划算法不适用于不规则海床以及随深度变化很大的复杂海流等三维(three-dimensional,3D)环境下的AUV运动规划。
为了解决3D环境下的AUV运动规划问题,有研究为了提高规划效率并减少内存需求,将3D环境投影到2D空间。然而,由于海流和障碍物的存在,这样投影得到的2D空间无法完全体现3D环境下的所有信息[24]。文献[19]首次采用水平集算法解决完全适用于3D的海洋环境下AUV路径规划问题,但是并未将此工作扩展到能量最优路径规划。文献[25]研究AUV实时最优路径规划问题时采用最优控制理论得到近似解析解,并在3D海流环境下产生近似最优路径,但是此算法不适用于AUV的速度很低的情况。基于以上综述可以得出,对3D下存在海流影响的AUV能量最优路径规划问题还有待进一步研究。
在上述相关工作的基础上,本文首先对AUV提出了一种从起始位置行驶至目标位置的3D能量最优路径规划算法。通过该算法,可以获得从起始位置到目标位置的能量最优路径。其次,在这项工作中考虑了更加接近实际工程背景的变化海流的影响,即海流与位置成固定关系。最后,利用一般线性系统的状态空间理论,得到了最优控制律的显式解。与现有的迭代和离散算法(例如图搜索和进化算法)相比,基于最优控制的算法可以在3D动态海流的影响下,可以生成能量最优路径和速度控制律,并获得全局最优路径。由于本文研究的AUV运动模型为非线性,这对于求得最优解析解带来了难度。
1 问题描述
1.1 运动学模型
考虑AUV的运动模型如图1所示,定义惯性坐标系G-xyz和体坐标系O-xbybzb。在惯性坐标系中,G为坐标原点,Gx置于海平面,且指向地理正东方向,Gz指向地心。在体坐标系中,O为坐标原点,并固定在AUV的重心,Oxb轴选取在AUV的纵中剖面内,正向指向船首,Ozb垂直于水平面指向地心方向。惯性坐标系和体坐标系都遵循右手螺旋法则。

图1 参考坐标系与AUV六自由度运动Fig.1 Reference coordinate system and six degrees of freedom movement of AUV
向量vc=[vcx,vcy,vcz]T用于描述惯性坐标系下的海流速度,假设海流大小仅随G-xyz下的位置而变化。忽略侧倾运动的影响,欠驱动AUV的运动学模型可以由以下方程表示:
(1)

1.2 问题定义

2 能量最优控制

(2)
定义相应的哈密顿函数为
(3)
(4)
(5)
(6)
由于式(5)和式(6)对于所有t≥t0满足对时间求导等于0,所以可以分别得到:

(7)

(8)
由式(4)可得
(9)
将式(7)变形为
(10)
将式(8)变形为
(11)
整理式(10)和式(11)得

(12)

(13)
当满足式(12)和式(13)时,AUV的运动满足最小化性能指标J。注意到式(3)~式(13)采用最优控制理论的庞特里亚金极小值原理,对第1.2节所提出的问题,得到了全局最优解所需要满足的条件。根据文献[27]中定理4.1,若找到一组符合式(12)和式(13)的解,那么该解可以全局优化性能指标式(2)。
3 最优航速及初始导航角求解
(14)

(15)
(16)
进一步得到
(17)
(18)
将式(17)、式(18)以及海流向量代入式(1),得到:
(19)
(20)
可得初始时刻为t0,初始状态为x(t0),y(t0),z(t0)时,其解为
(21)
式中:B=u*(0)I3,
首先求状态转移矩阵:
(22)
将B、T(t)以及xtf、ytf和ztf代入,求解上述线性定常系统非齐次方程,得到:
(23)
为了得到最优的运动路径,最优航向和最优航速需分别满足式(15)和式(16)。而式(15)和式(16)的求解则依赖于非线性代数方程式(23)。注意到非线性代数方程式(23)的已知参数是AUV的运动初始位置、末端位置和海流的大小。这就意味着最终能否顺利求解得到最优航向和最优航速,以及求解得到的最优航向和最优航速能否物理实现,取决于所给定的AUV运动初始位置、末端位置和海流的大小。当所给条件过于苛刻,将面临着最优航速、航向不可物理实现问题。
4 仿真验证
4.1 仿真参数设置
以下是AUV在海流的影响下从给定起始点到终止目标点的连续能量最优路径的仿真,选取起始时间t0=0,航行终止时间为tf,起始点(0,0,70),终止点为(70,80,0),海流向量vc=10-3[2x-y,x+2y,2z]T,此海流是变化的,表现为不同位置的海流大小是不同的,考虑到海流的稳定性,因此假设在一定时间内海流并不随时间变化。
4.2 能量最优AUV路径规划仿真结果
4.2.1 海流影响下能量最优路径规划
首先进行第一种情况仿真,即AUV在海流下由起始点到终止点的能量最优路径规划仿真。给定AUV俯仰角θ=π/3,将初始条件、海流大小以及给定起始点和目标点代入到式(23)中,通过数值求解方法得到最优初始导航角、最优航速和航行终止时间,如下所示:
(24)
再将式(24)中计算所得u*(0)以及航行终止时间tf代入式(2)中求得所需能量消耗。在第4.1节中给定的仿真参数下,得到如图2~图4所示的仿真结果。图2为海流影响下的AUV在x,y,z方向上的能量最优路径,其中横轴为航行终止时间,纵轴为AUV在x,y,z方向上的位移变化,仿真结果验证了AUV在能量最优性能指标下能够精确地到达目标位置。图3为海流影响下基于最优控制的AUV航速及艏向角变化曲线,基于最优控制的能量最优路径规划所求速度保持恒定以及所求艏向角呈线性变化,因此可保持推进器的推力为常值,基于最优控制规划的能量最优路径更易物理实现。

图2 海流影响下的AUV能量最优路径Fig.2 Energy-optimal path of AUV in presence of ocean current

图3 海流影响下基于最优控制的AUV航速及艏向角变化曲线Fig.3 Velocity and yaw angle changing curve of AUV based on optimal control in presence ocean current
图4为海流影响下的3D AUV路径,其中蓝色实线是AUV由起始点到终止点的路径,红色箭头表示海流。实验结果验证了基于最优控制的算法能有效解决AUV面向能量消耗的路径规划问题,在给定条件下获得全局能量最优路径。

图4 海流影响下的AUV能量最优3D路径Fig.4 Energy-optimal 3D AUV path in presence of ocean current
为说明基于最优控制优化算法的效果,用非优化的负反馈控制器进行仿真对比。第二种情况给出AUV采用负反馈控制器在海流下由起始点到终止点的路径仿真。AUV运动学模型为式(1)所描述,海流变量仍为vc=10-3·[2x-y,x+2y,2z]T。
基于负反馈的路径规划的设计过程如下。首先设计辅助控制量:
(25)
式中:k0为正常数。由此得到负反馈控制器的运动过程及其控制变量:
(26)
将起始点和终止点代入,k0取0.03(k0>0均可),仿真结果如图5所示。图5为基于负反馈控制器的航速和艏向角以及俯仰角变化曲线,虽然其航速和艏向角均可物理实现,但是对比图3和图5,基于负反馈控制所求速度需实时变化,而基于最优控制的能量最优路径规划所求速度保持恒定以及所求艏向角呈线性变化,因此可以始终保持推进器的推力是一个常值,验证了基于最优控制所规划的能量最优路径更易物理实现。

图5 海流下基于负反馈的AUV艏向角、俯仰角及航速变化曲线Fig.5 AUV yaw angle, pitch angle and velocity changing curvebased on negative feedback under ocean current
图6为基于负反馈控制器与基于最优控制的AUV能量消耗对比图,基于负反馈控制能量消耗远大于基于最优控制优化的路径规划所需能量消耗,因此验证了基于最优控制的能量最优路径规划算法的优越性。为说明海流变化程度对所提优化算法的影响,接下来扩大海流大小,针对AUV在海流下从(0,0,70)到(70,80,0)的能量最优路径规划仿真。给定AUV俯仰角θ=π/3,得到最优航速、航行终止时间和能量,如表1所示。当海流为原始大小时,在起始点、终止点的海流大小分别为0.14 m/s和0.24 m/s,此海流的最大值为0.28 m/s,得到的航速为0.26 m/s。海流与AUV航速一般设置为同一量级大小[29],而AUV航速大小一般为0~10 kN,得到的航速小于AUV实际最大运行速度,因此算法在物理上可实现。

图6 基于负反馈控制器与基于最优控制的AUV能量消耗对比图Fig.6 Comparison of AUV energy consumption based on negativefeedback controller and optimal control
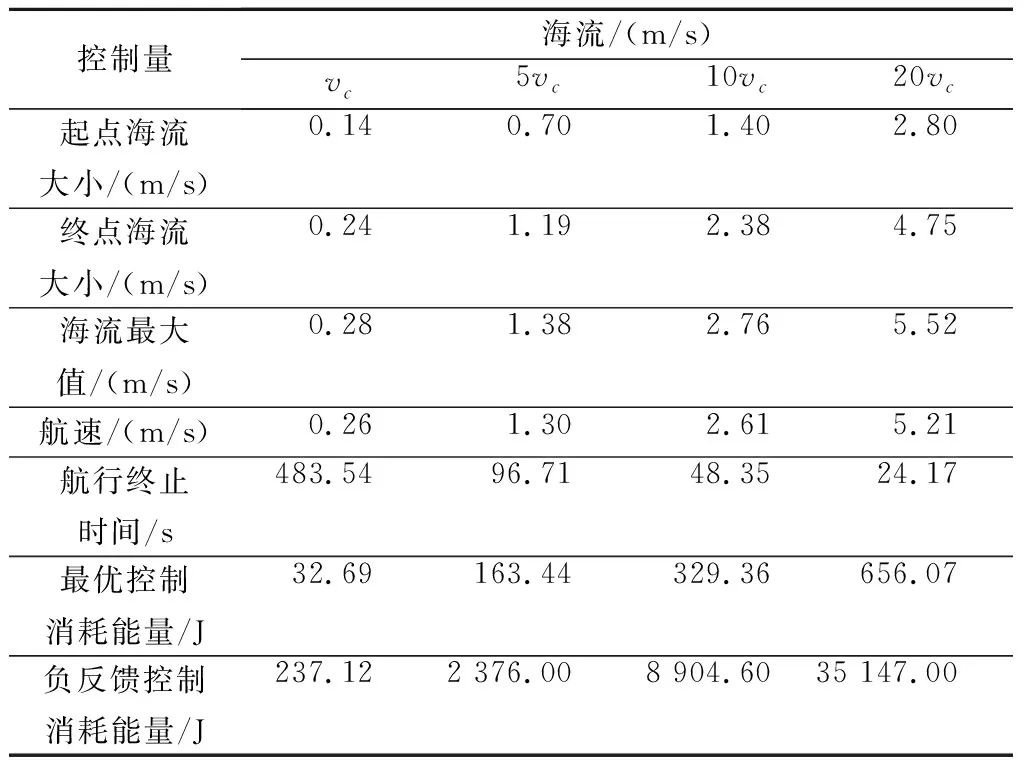
表1 不同海流下的控制量计算结果
海流分别扩大5倍、10倍时,得到的航速小于AUV实际最大运行速度,可以物理实现。
当海流扩大20倍时,即20vc=10-3[40x-20y,20x+40y,40z]T,在起始点、终止点的海流大小分别为2.8 m/s和4.75 m/s,此海流的最大值为5.52 m/s,得到的航速为5.21 m/s,得到的航速稍大于AUV的实际最大运行速度。因此当逆向海流过大时,导致所求航速过大,面临着不可物理实现问题。为了验证最优控制的可实现性问题,考虑当海流扩大100倍时,无法求得可行解,这是由于海流过大造成的。因此,当所给条件较苛刻时,将面临着物理不可实现问题。
4.2.2 大深度情况下能量最优路径规划
为了面向海底管道检修、扫雷以及水下传感器网络数据采集任务,需要大深度情况下的能量最优路径规划[30-31]。接下来进行AUV在海流下从(0,0,700)到(700,800,0)的能量最优路径规划仿真,验证了本文所提出的能量最优路径规划算法同样适用于大深度下的路径规划需求。并进行了在俯仰角分别为π/3 rad,π/4 rad,0.99 rad下的能量最优路径规划,仿真结果如图7所示。

图7 不同俯仰角下的3D AUV能量最优路径Fig.7 3D AUV energy-optimal path at different pitch angles
图7中蓝色实线为θ=π/3 rad下的能量最优路径,黄色实线为θ=π/4 rad下的能量最优路径,紫色实线为θ=0.99 rad下的能量最优路径。表2为不同俯仰角下最优航速、最优导航角和航行终止时间的计算结果。由表2看出,起始点和终止点相同的情况下,由于俯仰角不同,仿真结果不同。其中,在θ=0.99 rad下为连接起始点和终止点的俯仰角,但由于海流的原因,其所需的能量并不是最少的。在θ=π/4 rad下所求航速不可物理实现,且需要更多的能量,因此可以根据不同俯仰角下的计算结果,选取适当的俯仰角。

表2 大深度下不同俯仰角的控制量计算结果
接下来进行AUV在海流下从(0,0,700)到(700,800,0)的基于负反馈控制器的仿真。将起始点和终止点代入,得到所需能量消耗为7 759.4 J,其大于采用优化算法的能量消耗,因此验证了此优化算法的优越性。基于负反馈控制器在大深度下的仿真结果如图8所示,与基于最优控制的能量最优路径规划所求速度保持恒定以及所求艏向角呈线性变化,基于最优控制所规划的能量最优路径更易物理实现。接下来进行针对AUV在海流下从(0,0,700)到(700,800,0)的基于负反馈控制器的仿真。将起始点和终止点代入,得到所需能量消耗为7 759.4 J,其大于采用优化算法的能量消耗,因此验证了此优化算法的优越性。基于负反馈控制器在大深度下的仿真结果如图8所示,与基于最优控制的能量最优路径规划所求速度保持恒定以及所求艏向角呈线性变化,基于最优控制所规划的能量最优路径更易物理实现。

图8 大深度下基于负反馈的AUV艏向角、俯仰角及航速变化曲线Fig.8 AUV yaw angle, pitch angle and velocity changing curve based on negative feedback under large depth
5 结 论
水下环境的复杂性是AUV路径规划的巨大挑战,本文提出了一种3D环境下的AUV能量最优路径规划算法,采用了最优控制理论来得出最优航速变化律以及艏向角变化律,并考虑海流与水下位置成固定函数关系,获得从初始位置到目标位置的能量最优路径,能够有效地克服海流对AUV路径规划的影响。最后通过仿真对比了多组不同参数情况下的最优路径规划过程,仿真结果表明基于最优控制的算法下AUV能够精确地到达目标位置,验证了基于最优控制的优化算法的有效性。此外,基于最优控制的算法有效减少能量消耗,且规划的路径更易物理实现。未来的工作将进一步研究更复杂的海洋环境情况,例如存在障碍物和更加复杂海流的对AUV路径规划的影响。此外,将进一步研究在有限能量以及时变、非线性海流情况下的路径规划问题。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
数学年刊A辑(中文版)(2021年1期)2021-06-09
四川大学学报(自然科学版)(2021年1期)2021-01-26
中国海洋大学学报(自然科学版)(2020年8期)2020-08-03
数学物理学报(2019年3期)2019-07-23
电子制作(2019年23期)2019-02-23
测控技术(2018年2期)2018-12-09
数学物理学报(2018年3期)2018-07-17
上海大中型电机(2017年4期)2017-02-06
通信电源技术(2016年4期)2016-04-04