
负载敏感式无人机发射平台调平系统控制仿真
2021-12-10 08:30邓传涛胡国友冷新龙贺红林
计算机仿真 2021年11期
邓传涛,胡国友,冷新龙,贺红林*
(1.南昌航空大学航空制造工程学院,江西南昌 330063;2.江西洪都国际机电有限责任公司,江西南昌 330024)
1 引言
随着国防建设和国民经济的快速发展,飞行器的研制得到了飞速的发展。无论是导弹的发射还是无人机的发射,为使飞行更加平稳,对飞行器发射平台的发射姿态水平调节尤为重要。而提高控制精度和控制速度一直以来又是各行各业的敏感话题,在许多行业中,特别是需要高精控制场合中,拥有较大的市场前景。许多军用与民用设备正常工作时都需要一个高精度的水平平台,如车载雷达、车载火炮发射装置、静力压桩机等。对平台水平度的调节是这些设备达到工作条件必要的一个环节。近年来,计算机和电子技术的发展,自动调平已逐渐取代传统的手动调平。目前,在军用产品方面,平台调姿应用最广的是雷达天线车,大部分车载平台调平方法及控制系统的研究都是基于雷达天线车展开的。而在武器或无人机等飞行器发射平台调姿方面的研究相对较少,其相关指标要求高,不像工程车辆要求低,而且导弹的作战使用环境,以及无人机的各种特殊使用场合,使得这类飞行器的自动调平系统相对雷达天线车往往更为复杂多变,这不仅要求调姿系统高效高精度,更要求调姿系统地形适应能力强。鉴于这一技术的重要性和特殊性,研究高精度、高效率的自动调平系统就显得非常必要[1-3]。负载敏感控制系统是最近发展起来的一种无关于负载的液压系统,可以很好地解决液压系统的输出特性与负载特性相适应的问题,增强系统的自适应能力。负载敏感技术的使用能够有效的减少系统的发热,这样就减小了系统的功率损失,延长了液压系统的使用寿命,常规液压系统的工作效率远比不上负载敏感系统的工作效率,它也可以使机械设备的结构更加紧凑,具有构造未来传动及控制系统的潜力[4-9]。早期的车载发射平台采用的调平系统多是手动式调平器,如俄罗斯SA-2和BM-21地空导弹发射车,采用的是三点手动式螺旋千斤顶调平器,这类调平器调平时间长,调平精度低[10]。随着技术的发展和武器装备要求的提高,出现了机电式及液压式千斤顶,通过对自动控制系统的应用,开发出了飞行器发射平台的自动调平系统,该系统具有调平速度快和调平精度高的优点[11]。为了研究更加高效率,高精度和具有稳定性的调平液压控制系统[12-13],借助AMEsim仿真软件对所建立的调平液压系统仿真模型进行仿真分析,模拟复杂工况下的无人机发射平台自动调平过程。
2 平台的调平策略
2.1 自动调平方案设计
任意系统的调平都可以简化为对某一平台的平面进行调平。根据基本理论的分析可知,只有当被调平的直线相互垂直时,它们在各自的调平过程中才没有耦合。常见调平平台三点液压支撑结构的抗倾覆能力一般,调平的精度也不高,达不到高精度无人机发射平台所要求的水平。六点液压支撑相对于四点液压支撑来说,结构较为复杂,并且存在静不定现象,而且易出现“虚腿”现象。故无人机发射平台自动调平系统采用四点刚性支撑,平台结构大致如图1。
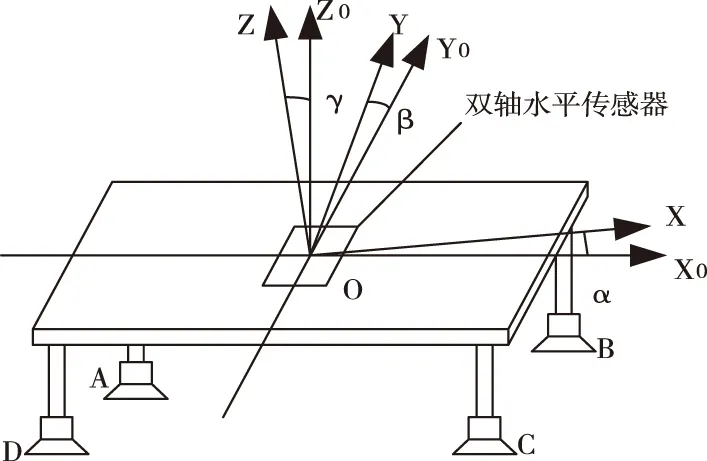
图1 四点刚性支撑平台结构示意图
调平控制技术是以控制策略及特种平台支腿为核心,利用负载敏感系统来应对复杂的环境场合。
图2所示为单腿电液比例调平控制示意图。用压力传感器检测支腿的有效触地,用位移传感器检测支腿的伸出状态、控制平台支腿的动作,并依据调平控制策略实现发射平台的快速、自动调平,同时利用机械锁紧技术(或液压锁紧技术)在规定时间内维持平台水平姿态。图中位移传感器检测到活塞杆的实际位移并将其转换成电压信号,与给定的预期位移电压信号比较得出偏差量,PID控制器便根据此偏差量得出控制电压值,在功率放大器中将得到的控制电压放大并以电流形式输出用于驱动比例电磁铁。比例电磁铁得电后产生一定的输出力推动电液比例控制阀,从而调节支腿液压缸两腔进出油量,来实现对活塞杆的位移控制。

图2 单腿电液比例调平控制示意图
2.2 自动调平流程分析
下图为详细调平系统流程图。

图3 自动调平流程图
在调平方案中,关键分为两大步进行,一是开启调平后的水平调节防“虚腿”调节过程,另一个是通过反馈信号判断是否达到传感器的预设值。该平台在调平过程中结合传感器收集的数据,既通过判断水平传感器的横向和纵向角度又进行追逐式调平(最高点不动,其余的三点向上运动,最终使平台达到水平状态的方法)。当平台结构示意图中α和β都为0时,就表示平台的状态恰好为水平状态。与此同时,为了预防虚腿的出现,在调平的两个步骤都有相应的检查流程,确保调平结束没有虚腿。在各支腿都达到设定压力值且平台也符合水平度要求时,整个调平流程才宣告结束。若满足如上条件,则表明此次自动调平结束。
3 调平液压系统的设计与建模
3.1 系统的组成
调平液压系统由检测装置、控制装置和调平执行机构组成,检测装置为平台上安装的双轴水平传感器,以及安装于各支腿上的微动开关和压力传感器。采用双轴传感器来检测平台的水平度,能够实时高精度的测量发射车水平度,它作为控制系统进行发射车水平度调节的反馈元件,为系统调平控制提供依据。它的检测值精度也会直接影响到调平系统的调平精度,所以必须选用满足军品级环境要求的双轴传感器。调平系统的执行机构主要由带自锁功能的比例方向阀控制的单杆活塞液压缸和电磁阀组成。同时在每条支腿上连接液压锁,以防平台在调平后由于支腿上下腔油路泄漏导致软腿或平台在未受控制时自行下降,造成平台失稳,影响后续工作。
如图4左侧,本平台采用四条图示支腿来对平台进行调平。系统主要由柱塞泵、压油滤油器、三位四通比例方向阀、溢流阀、液压锁、位移传感器、负载、调平支腿液压缸、PID控制模块组成。以调平平台的一条支腿为例,图4右侧为比例阀控系统单条支腿原理图。在比例阀入口设置了一个减压阀,它是采用流体的节流原理,来保证每个工作支腿的比例阀进出口的压力差保持不变,这样就可以保证多条支腿同时动作时,互不干扰。同时,通过直通式的定差减压阀的作用,不论负载怎么变化,都能保证比例方向阀进出口的压差不变,因此,可以得出比例方向阀的流量和阀口的开度成正比关系。压力油从减压阀进入比例方向阀后,当需要支腿做伸出动作时,比例方向阀的左位通电,压力油通过比例方向阀后通过液压锁,由于有压力油液压锁不会锁紧,压力油进入液压缸的无杆腔,推动支腿液压缸伸出,支腿位移在位移传感器的反馈下反馈到PID控制模块,来调节比例方向阀的开度,从而达到更加快速、精准的调节平台的水平度。

图4 调平平台实体图与比例阀控系统支腿原理图
3.2 系统的建模与模型分析
依据无人机发射平台的液压调平系统原理,利用AMEsim(高级建模仿真环境)软件对该发射平台建模。这种图形化的建模方法,将使用者从复杂的数学建模过程中解放出来,从而更加专注于对系统本身的优化设计。在满足性能要求的条件下,对上述平台液压系统从建立如下模型,如图5,图5左边为整体平台负载敏感比例阀控系统仿真模型,右边为单支腿仿真模型。先在单条支腿的仿真模型中测试控制状况,在选择好合适的PID参数后,将所得的经验用到整体平台负载敏感比例阀控系统仿真模型中,进一步验证调平系统的控制稳定性。
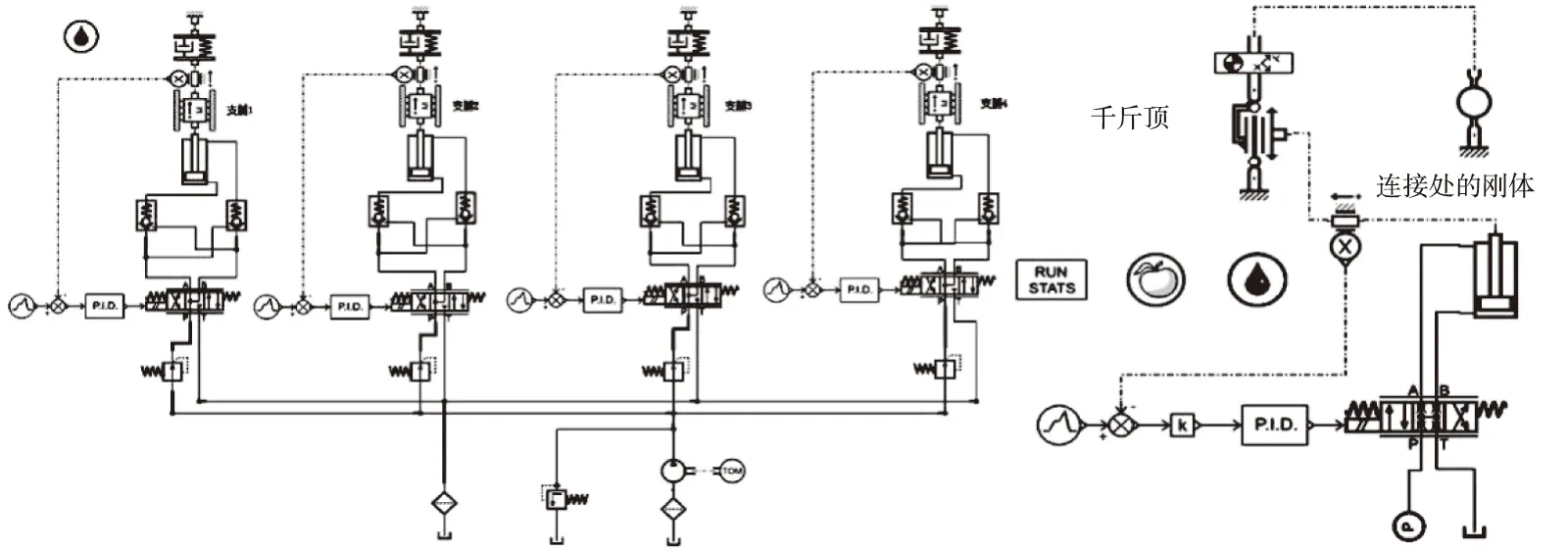
图5 负载敏感比例阀控系统仿真模型
4 系统的仿真结果分析
将上图的负载敏感比例阀控系统仿真模型在AMEsim软件草图模式中选择合适的元件绘制好,选取相对应的子模型,然后设置好与实际平台匹配的参数,最后在仿真模式中,对平台调平系统进行仿真,下面对仿真的结果分析。
1)支腿液压缸的流量特性
图6是仿真而得的支腿液压缸流量变化情况。从图中可以看出前1s内支腿流量波动比较严重,是因为在打开比例换向阀的同时液压缸支撑较大负载,对液压系统有较大的冲击,造成流量在此刻波动,当在比例方向阀换向时,这样的情况也发生在无杆腔在33s附近的流量变化。总体上来说,液压支腿的流量特性曲线比较稳定,对调平支腿的控制非常平稳,同时在支腿液压缸流量特性曲线中,无论支腿是在伸出还是收回,无杆腔的流量总是高于有杆腔的,这样的原因是液压缸的液压腔内有杆腔和无杆腔的作用面积不同。前10s内有杆腔的流量变化是先逐渐变大,维持相对稳定后,再逐渐变小,这是负载敏感阀控系统在起作用,针对一开始的预设信号与初始的支腿位置距离较大时,比例方向阀的开度就较大,直至最大,当支腿伸出至快接近目标位置时,对应阀的开度变小,以便于能使支腿更加精准可控的达到目标位置,实现平台的调平。

图6 调平系统支腿液压缸流量特性曲线
2)支腿液压缸的压力特性
各支腿液压缸的压力特性曲线虽不尽相同,但其中的变化情况类似。以一条支腿的压力特性曲线为例展开分析。由图7可知,虽然在前1s内出现了压力波动,但于整个调平过程而言,液压缸的压力特性曲线平滑,在大负载的情况下,说明系统的控制过程平稳,系统的鲁棒性良好。在图7的有杆腔曲线中可以看出0~24.35s内,有杆腔的压力在前1s内短暂上升后,持续下降,这个过程中,支腿位移传感器不断反馈支腿伸出状态回支腿PID控制器,由PID控制器调节系统流量。图8为经PID控制器后的输出控制量变化曲线。在支腿快伸出到初始信号预设的距离时,伸出的速度越来越慢,以便于对平台的控制达到较高的精度。在24.35s~32.7s内保持在某一位置不动,所以有杆腔的压力在此段时间内为0且保持不变。最后一段曲线为支腿收回时的状态,为了快速收回,所以有杆腔一直保持高压状态。其中33.15s附近无杆腔的压力有个明显的突变,由于当支腿在伸出达到目标位置后收回时,有杆腔开始输入压力油,无杆腔为出油口,支腿逐渐收回,这是支腿收回时的一个压力变化现象。

图7 调平系统支腿液压缸压力特性曲线
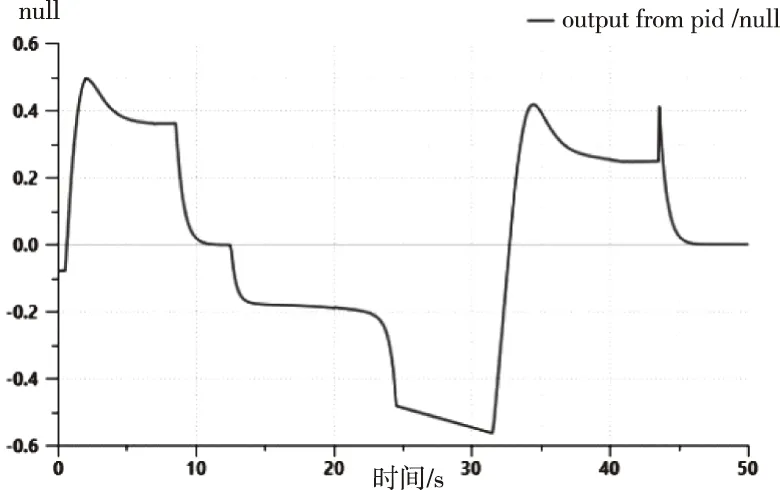
图8 PID控制器输出的控制量
3)支腿液压缸伸出速度特性
图9为仿真后得到的支腿液压缸伸出速度特性曲线,从图中可以看出,在前0.75s内支腿伸出速度波动剧烈,这是当支腿开始动作时,比例换向阀的打开对整个调平系统具有一定的冲击,造成在开始的0.75s内短暂震荡。由图可知,在12.5s左右换向时,并未出现较大的震荡和冲击,在43.5s左右出现较为明显的突起,是由于油液具有一定的惯性,在较大速度时,系统的控制会有一点微弱的滞后,所以在即将接近目标位置时,通过位移传感器反馈回PID控制器后的输出控制速度都会逐渐减弱,以便于系统对调平平台更加精准的控制。
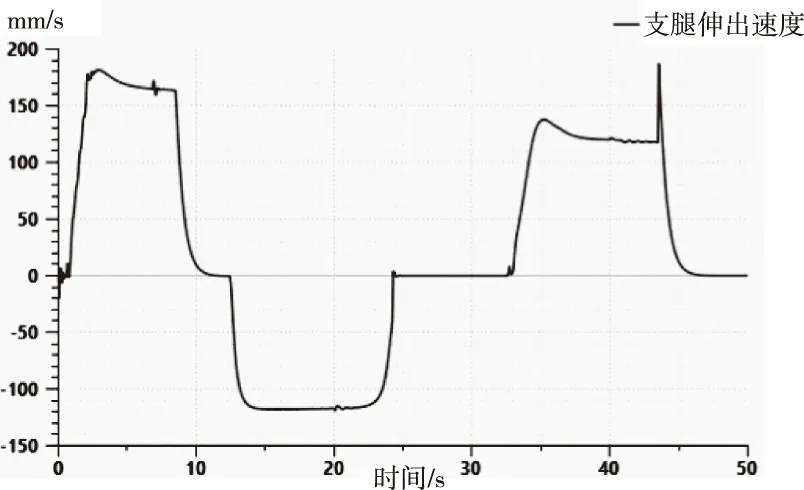
图9 调平系统支腿速度特性曲线
4)支腿液压缸位移响应和控制精度
为了更好的对比预设信号与实际位移的契合度。在图10中给出了预设信号和支腿实际位移响应曲线。预设信号与支腿实际位移响应符合的很好。实际应用中,由于比例阀可实现无极调速,它所能达到的瞬时最小速度可以很小,在调平控制的末段,它能根据倾角传感器的反馈信号实现非常微小的伸出,从而达到精确调平的目标。

图10 调平系统支腿位移响应曲线
5 结论
1)设计研制了无人机发射调平平台,提出了合理的调平方案。
2)基于AMEsim软件环境建立了无人机发射平台的液压仿真模型,对所建立的无人机发射平台调平系统进行仿真,得到液压支腿的动态特性曲线,直观的反映了平台调平过程液压回路状态。
3)引入改进的PID增量控制闭环方式实现系统功能,可达到对平台的高效率高精度控制。
4)此系统的鲁棒性良好,该系统能适应调平平台在复杂环境下的工作要求。
猜你喜欢
汽车实用技术(2022年19期)2022-10-19
机床与液压(2022年18期)2022-10-13
汽车实用技术(2022年14期)2022-07-30
广东造船(2022年3期)2022-07-09
科技与创新(2022年10期)2022-05-27
中国应急管理科学(2022年2期)2022-05-23
化学教学(2022年4期)2022-05-07
专用汽车(2021年12期)2021-12-24
中国高新技术企业(2017年11期)2017-07-08
建材发展导向(2016年2期)2016-05-19
