模型预测滤波在舰载武器传递对准技术中的应用*
2022-01-06 08:35牟宏伟李昂阳
舰船电子工程 2021年12期
牟宏伟 韩 磊 李昂阳
(1.中国运载火箭技术研究院 北京 100076)(2.首都航天机械有限公司 北京 100076)
1 引言
舰载武器通常采用传递对准技术实现初始对准,以提供导航初值。传递对准精度将会直接影响武器的打击精度。影响传递对准精度的因素主要有杆臂效应误差、时间延迟误差和挠曲变形误差等。其中,主、子惯导之间的杆臂参数可通过准确测量得到,且作为传递对准诸元数据,直接装订至武器,因此能够消除杆臂效应误差的影响;舰船时统设备可提供秒脉冲信号,子惯导在接收主惯导速度、姿态等信息的同时,能够接收秒脉冲信号,时间延迟不大于1ms,因此能够消除时间延迟误差的影响;由于海浪冲击、温度变化、舰船自身载荷等外力因素影响,船体会在不同程度上产生变形,影响主惯导输出速度、姿态等信息的准确性,当挠曲变形达到一定程度时,可能会使滤波器发散,影响传递对准精度。因此,补偿挠曲变形误差是提高传递对准精度的关键。
补偿挠曲变形误差主要有两种方法:第一种是对挠曲变形进行直接或间接测量,补偿其误差;第二种是用数学模型描述挠曲变形。目前,挠曲变形测量的方法主要包括自准直平行光管测量法、布拉格光栅测量法及摄影/摄像测量法等[1],但上述方法具有各种局限性,例如测量精度低、测量方法复杂、要求光学通视等各种缺陷。针对第二种方法,最为实用的就是将动态挠曲变形近似为存在随机拢动的随机过程,这一特性与白噪声驱动下的马尔可夫过程相似[1~3]。因此,通常把挠曲变形当作二阶马尔可夫过程来进行建模,并对其进行相应的假设,但在实际应用中,由于动态特性复杂,该建模方法的准确性是未知的。
针对上述问题,本文提出了模型预测滤波(Model Prediction Filter,MPF)技术,并应用于传递对准中。模型预测滤波能够在线估计未知的模型误差,而且由于各滤波方程均为解析表达式,所以不存在迭代求逆过程,计算速度比较快[4~5]。最后,通过数值仿真分析,验证了该方法的有效性。
2 传递对准误差模型
2.1 误差方程
姿态误差方程为

速度误差方程为
2.2 滤波模型
根据文献[1],传递对准速度加姿态匹配的滤波方程为

系统状态变量为

其中,δvx、δvy分别为东向和北向的速度,ϕmx、ϕmy、ϕmz分别为主惯导系统与子惯导系统之间的失准角,ϕax、ϕay、ϕaz分别为主惯导系统与子惯导系统之间的安装误差角,εx、εx、εx分别为陀螺漂移误差,∇x、∇y分别为加速度计误差。
系统状态方程为

速度加姿态匹配传递对准匹配方法的滤波模型中观测量是主、子惯导系统之间的速度误差以及姿态误差,系统观测方程为

3 模型预测滤波算法
模型预测滤波的提出克服了传统卡尔曼滤波在滤波过程中将模型误差假设为过程噪声处理的缺点[6~9],而且模型预测滤波的最大优点是计算速度快,将可观测低的状态变量作为模型误差进行估计,以模型误差为估计量,用观测量校正不确定误差,而且由解析表达式表达的模型预测滤波方程,没有迭代求逆过程,在保证系统高精度的同时,降低了系统维数,加快了计算速度,提高了实时性。
3.1 模型预测滤波算法
假设存在线性系统如下:

其中,f∈Rn为连续可微非线性函数;x∈Rn为状态变量;G∈Rn×q为模型误差的分布矩阵;D∈Rq为模型误差向量;y∈Rm为量测向量;v为零均值的高斯白噪声的量测噪声向量,且有协方差E{vvT}∈R。
令状态估计与预测输出估计之间的关系如下:


由李导数定义,k阶李导数为

因为D的任意分量第一次出现在hi的微分中的最低阶数为pi,所以当微分阶数小于pi时,有,式(12)可写为

当i=1…m时,分别求出如式(13)的泰勒级数展开式,并写成矩阵的形式,则有:

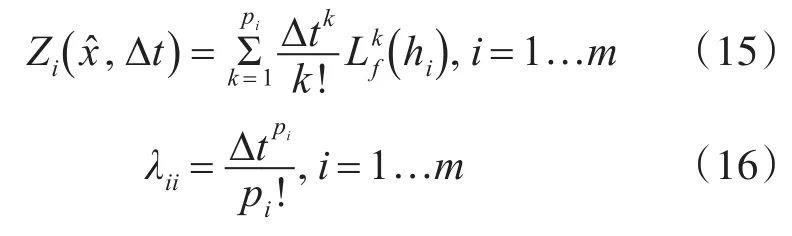
U(̂)∈Rm×q为灵敏度矩阵,由式(14)可以表示为
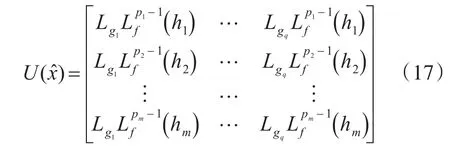

其中,gj为G的第j列,j=1…q。
模型预测滤波的基本工作原理是预测输出跟踪量测输出,进而估计出模型误差量。则性能指标函数J(D)定义由预测输出与量测输出之间的残差加权平方和及模型修正项加权平方和组成,表达式为

其中,W∈Rq×q为模型误差的加权阵,估计效果会受W取值的影响,但其最优值往往很难得到,所以只能根据经验近似选取,如果选取不当,则会造成对模型误差估计的效果变差,进而导致状态估计精度降低。通常在模型误差较大的情况下,W的取值不应该过大,而在模型误差较小时,W的取值可以稍微大一些。
假设小时间间隔Δt为常值,得到y(t)=yk,y(t+Δt)=yk+1。如果使J最小,则需满足∂J/∂Dk=0的条件,为此可以获得在[tk,tk+1]间的模型误差估计为


3.2 基于模型预测滤波的滤波器设计
模型预测滤波不但克服了假设模型误差为零均值高斯白噪声的局限性,对不精确模型具有很好的鲁棒稳定性[10~12],而且由于降低了系统状态变量的维数,提高了计算速度。针对上述模型预测滤波的优点,本文研究模型预测滤波与卡尔曼滤波相结合的混合滤波算法,将状态变量姿态角作为模型误差进行预测估计,在很大程度上提高了计算速度。仿真结果表明,该算法能够在保证精度的情况下,减小计算量,提高系统的实时性。
令状态变量中ϕ为模型误差,其他均为系统状态变量,得到基于模型预测滤波的状态方程为

其中,ΔX∈R6为系统状态变量,F∈R6×6为状态转移矩阵,G1∈R6×9为模型误差分布阵,D∈R9为模型误差向量,G2∈R6×6为系统噪声驱动阵,W∈R6为系统噪声。
4 仿真研究
4.1 仿真条件
假设载体的纵摇角为ψ,横摇角为θ,航向角为γ,则运载体的数学模型为

其中,ψm=5°,θm=5°,γm=5°,ωψ=2π/6(rad/s),ωθ=2π/8(rad/s),ωγ=2π/10(rad/s)。
初始相角:ψ0=0°,θ0=0°,γ0=0°。初始纬度φ=45.7796°,初始经度λ=126.6705°;安装误差角ϕax=1°,ϕay=1°,ϕaz=1°;陀 螺 常 值 漂 移 为0.01°/h ;加速度计零偏为10-4g0。
分别将卡尔曼滤波和模型预测滤波应用于传递对准仿真中。失准角估计误差结果见表1,仿真结果分别见图1,其中,图(a)为卡尔曼滤波结果,图(b)为模型预测滤波结果。

表1 失准角估计误差(RMS)
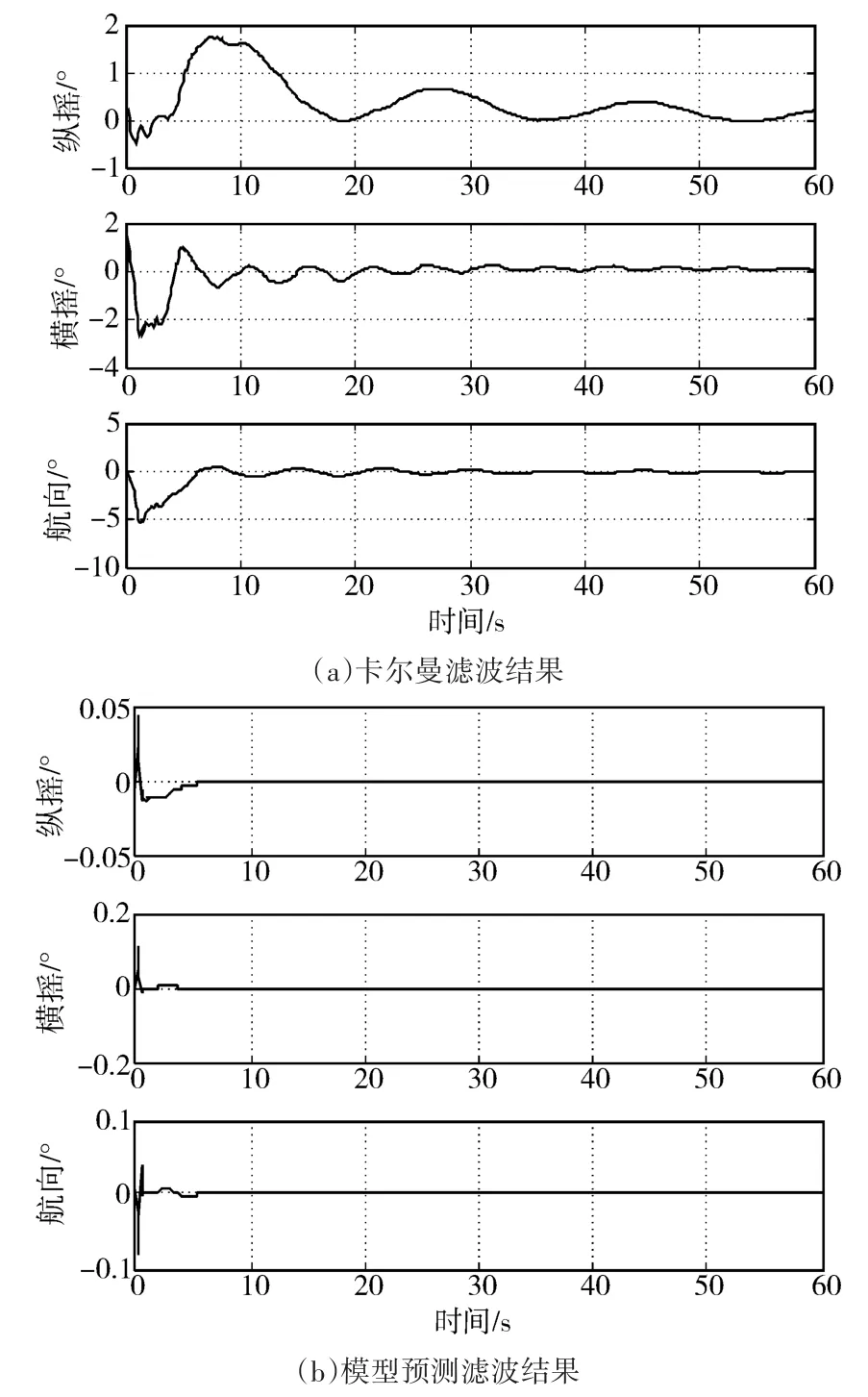
图1 基于卡尔曼滤波和模型预测滤波的安装误差角估计误差
4.2 仿真分析
从图1、图2可以看出,模型预测滤波对失准角的估计精度要高于卡尔曼滤波,收敛速度相对较快,而且误差曲线相对较为平缓,滤波更为稳定,这主要是因为模型预测滤波能够对未知的挠曲变形模型进行预测估计,保证了滤波的精度和稳定性,而且模型预测滤波降低了系统维数,减小了计算量,提高了滤波速度。

图2 试验设备安装图
5 试验验证
为了验证模型预测滤波算法实际传递对准中的可行性,以某次SINS实测数据为基础,进行离线分析,试验设备的安装见图2,基于卡尔曼滤波算法和模型预测滤波算法的方位角对准结果见表2。模型预测滤波算法的对准精度更高,很好地解决了挠曲变形带来的误差。

表2 基于卡尔曼滤波和模型预测滤波的对准结果
6 结语
本文深入研究了模型预测滤波技术,并将其应用于舰载武器传递对准中,解决了挠曲变形数学模型未知的问题。仿真结果表明,模型预测滤波比传统的卡尔曼滤波不但具有更高的滤波精度,而且提高了收敛速度,验证了模型预测滤波在舰载武器传递对准中的有效性和可行性,进而能够提高舰载武器的打击精度,提升实战能力。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
农业工程学报(2022年10期)2022-08-22
舰船电子工程(2022年6期)2022-08-02
物联网技术(2022年7期)2022-07-21
农业与技术(2022年12期)2022-07-04
读者(2021年15期)2021-07-13
视野(2020年1期)2020-03-11
学苑创造·A版(2019年9期)2019-11-07
智富时代(2019年5期)2019-07-05
智富时代(2019年5期)2019-07-05