基于改进二维Otsu算法的电机故障识别研究*
2022-01-06 08:35张龙威杨向宇
舰船电子工程 2021年12期
张龙威 杨向宇
(华南理工大学电力学院 广州 510640)
1 引言
电机广泛应用于工业生产活动中,电机的状态监测和故障诊断受到很大的关注。传统的电机在线状态监测,是通过采集电机的物理量对其进行状态监测和故障诊断[1]。近年来,红外热成像技术因其无损、高效的特点以及技术发展,在实际应用中备受关注。红外热成像技术作为一种辅助的故障诊断技术[2],能够以非接触的方式监测温度,一般电机发生故障时都伴随温度升高,该技术能够定性和定量分析电机故障前或故障时状态[3]。当电机发生故障时,热成像仪将拍摄上传大量热成像图片,计算机需要实时快速提取高温区域来定位故障点,因此需要准确高效的图像分割技术作保障。
图像分割是图像处理的重要环节,此类方法以前多以人工选择温度分割阈值的方式进行热图像像素分类以及高温区提取,该方法只注重物体温度的绝对值而忽视物体间温度的相对值,自适应能力差,易受环境温度影响,并不能准确地分割出高温区域,而Otsu图像阈值分割法[4]能够自动计算最适应阈值,精确分割目标区域进行故障点定位。传统一维Otsu分割法将图像分割成前景和背景,方法简单,效果良好,应用广泛,但是受干扰影响较大,因此,二维Otsu图像阈值分割的方法被提出[5],其分割精度显著上升,抗干扰能力大大增强,但是复杂度提升至二维,计算时间提高,为了降低计算时间,许多学者提出了不同的改进方法,有从优化寻优算法出发的基于自适应遗传算法的改进Otsu算法[6]和基于改进易经占卜进化的图像分割算法[7],有从优化分割算法出发基于迭代阈值的改进Otsu算法和多维算法独立分维处理以及其他通过修改多维坐标系等方法进行改进[8~10]。
萤火虫算法首次于2008年由剑桥学者Xin-She Yang提出,传统的萤火虫算法仍有易陷入局部解、早熟等缺点,许多学者提出了与混沌策略相结合的改进[11],基于惯性权重的改进[12],基于自适应种群大小的改进以及与其他算法融合等解决方案[13~14]。
因此,本文将提出一种基于改进萤火虫寻优的二维Otsu图像阈值分割算法,该方法的主要思想将改进萤火虫算法运用在二维Otsu图像分割法的目标函数的求解问题上,解出图像分割的最佳阈值并对其进行图像分割,在保证分割阈值精确的基础上解决了计算复杂度高、计算时间长的缺点。
2 基本原理
2.1 二维Otsu法原理
传统一维Otsu图像阈值分割法主要原理是最小二乘法推广到图像分割应用中,但其抗干扰能力差,为了解决上述问题,引入了邻域平均灰度值,将该点的灰度值i与其邻域平均灰度值j合并成一个二元组(i,j),引出了二维Otsu图像阈值分割法。
与一维Otsu图像阈值分割法类似,设一副灰度图像的像素灰度值为L=[0,1,…,L-1],计算灰度值为i,邻域平均灰度值为j的像素点的频数为nij,其出现的概率为pij为

存在阈值(s,t),s为灰度阈值,t为邻域均值阈值,将图像的像素点分成四类,如图1所示。

图1 二维直方图的俯视图
选取图1中A区域为背景部分,B区域为前景部分,C、D区域为噪声部分,即:

则背景A类和前景B类二者的概率分别为


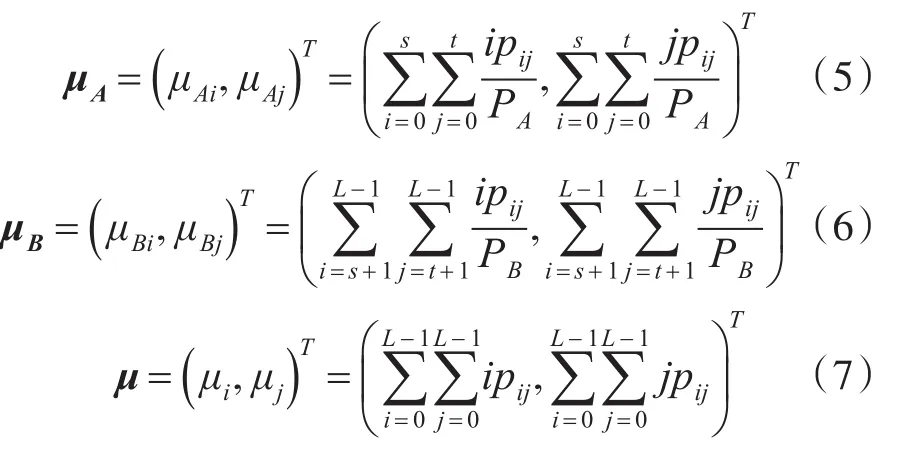
背景A类和前景B类的均值向量组以及总均值如式(5)~(7)所示。
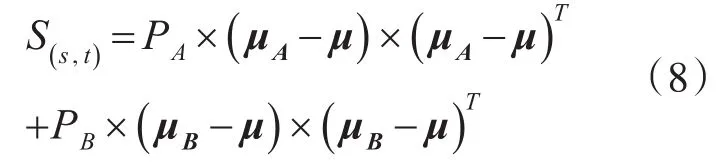
对比一维Otsu图像阈值分割法类间方差的概念,此处引入了离散测度矩阵S(s,t),如式(8)所示。
取离散测度矩阵的迹tr(S(s,t)),如式(9)所示。

当取得最佳二元阈值组(s0,t0)时,上述离散测度矩阵的迹 tr(S(s,t))得最大值,即类间方差最大,令最佳阈值为,并以T0为阈值对图像进行分割,二维Otsu图像阈值分割得到最佳效果。
而上述计算需要遍历所有(i,j)的取值,通过比较得到最大的离散测度矩阵的迹来确定最佳阈值,遍历计算以及方差计算使得经典方法计算量大,实时性差,而求取二维Otsu算法的最佳阈值就是一种寻优的过程,本文引用萤火虫算法进行求优。
2.2 萤火虫算法原理
2.2.1 基本萤火虫算法
萤火虫算法数学模型如下[15]。
定义在n维空间中每个萤火虫的位置X如式(10)所示。

定义萤火虫的吸引度β(γ)如式(11)所示。

式中的β0为初始吸引度,即两只萤火虫之间空间距离为0时的吸引度;γ为光强吸收系数;R为两只萤火虫之间的空间距离。
每只萤火虫都只向着看上去比自己更亮的萤火虫飞去,则萤火虫的移动模型如式(12)所示。

上式表示第i个萤火虫向着更亮的第j个萤火虫移动,式中的Xi为第i个萤火虫的初始位置;表示亮度高的萤火虫影响其他萤火虫移动;α·rand是防止解陷入局部最优解而设置的随机项;α为步长因子,且α∈[0,1];rand为随机因子矩阵,rand矩阵中的每个因子∈[-0.5,0.5],一般取均匀分布或是正态分布。
2.2.2 基于模拟退火因子的萤火虫算法
如式(14)所示,萤火虫个体总会向着看上去比自己更亮的萤火虫飞去,随着迭代次数的增加,萤火虫群会在最优解附近聚集,同时,最亮的萤火虫移动模型如式(13)所示,在求解最终阶段易出现震荡,会影响最终解的精度和收敛速度。

为了解决上述问题,本文在萤火虫算法中引入了模拟退火因子,在迭代初期,步长因子设定相对较大,随着迭代次数的增加,步长因子逐渐减小,即萤火虫个体越靠近最优解时移动距离越短,使得萤火虫个体可以在迭代初期快速定位最优解的位置,在迭代后期可以更加精确得到最优解。具体引入方法如式(14)所示。

该式表示了步长因子α与迭代次数t的关系;式中α0为初始步长因子,本文取α0=0.97;MG为最大迭代次数;λ为控制因子,用来控制最大迭代周期内全局搜索和局部搜索占据的比重,本文取λ=400。
为了验证引入控制因子λ的作用,取α(t)=0.97t、的图像分别表示不引入控制因子和引入控制因子时最大迭代次数为10和1000时的步长,仿真结果如图2所示。
如图2(a)所示,当不引入控制因子时,当最大迭代次数远小于200时,步长依旧很长,仍易出现震荡,当最大迭代次数远大于200时,步长过短收敛极慢,搜索能力大大降低,失去了全局搜索能力,因此,需要引入控制因子,建立与最大迭代次数相关的步长因子公式。
如图2(b)、(c)所示,当引入控制因子时,最大迭代周期为10和1000时,分别在第5代和第500代步长因子就接近0,即有接近一半的迭代周期为全局搜索,剩下的迭代周期为局部搜索,既保证了快速性的同时也保证了准确性。

图2 三种步长计算收敛情况对比
通过引入模拟退火因子,使得萤火虫算法在迭代前期能够快速定位最优解不陷入局部最优解,并在迭代后期能够提高解的精度。
2.3 基于改进的萤火虫算法的二维Otsu图像阈值分割法
2.3.1 萤火虫算法与二维Otsu图像阈值分割算法的结合
将萤火虫算法与二维Otsu图像阈值分割算法相结合本质就是用求优智能算法简化求解二维Otsu分割法的阈值(s,t),通过改进智能算法,使其避免陷入局部最优解以及使其求解时间缩短和解更加准确。
将二维Otsu阈值分割法求取最大类间方差作为萤火虫算法的目标函数,如式(15)所示,此时阈值(s,t)为图像分割的最佳阈值。

应用萤火虫算法有以下假设。
1)所有萤火虫不分性别,除了亮度完全一样;
2)吸引度只与亮度与距离有关,吸引度与亮度成正比与距离成反比;
3)萤火虫亮度由目标函数决定。
2.3.2 算法流程图以及寻优步骤
基于改进萤火虫算法的二维Otsu图像阈值分割法流程图如图3所示。

图3 本文算法流程图
1)具体步骤如下:
读取灰度图,采集各像素点灰度值i及其邻域平均灰度值j组成二元数组(i,j),并对其进行统计得出频数矩阵fij256×256从而计算得到频率矩阵pij256×256;
2)初始化萤火虫种群,设置最大迭代数Max-Generation,种群萤火虫数量num,随机步长因子的大小α,传播介质的光强吸收系数γ,初始吸引度β,并初始化萤火虫的位置;
3)计算每个萤火虫对应的亮度,即二维Otsu图像分割法类间方差;
4)根据萤火虫移动公式模型,更新萤火虫新的位置;
5)寻找并记录亮度最大的萤火虫,即二维Otsu图像分割法最大类间方差;
3 实验结果及分析
为了验证本文研究的效果,本文选取电机运行时的热成像灰度图进行仿真实验。仿真实验电脑配置为Win7,Intel Core i5-4590 CPU 3.30GHz,8GB RAM,64位操作系统,仿真软件为Matlab。
实验对象是一台水轮异步发电机,电机具体参数如下:额定功率为400kV·A,额定电压为400V,额定频率为50Hz,额定功率因数为0.8,额定电流为577A,额定转速为800r/min。
实验条件:发电机工作在输出功率为200kW条件下,室温为33°。本文算法实验参数如下:萤火虫个数num=12,迭代次数为MG=20次,初始步长因子α=0.97,光吸收系数为β=1,光强系数γ=1。
本文选取定子接线头处为主要分割区域,同时设置分割区域在图像中心以及边缘,如图4(a)、图5(b)红圈所示,使用传统一维Otsu分割法、传统二维Otsu分割法以及本文提出的基于改进萤火虫算法的二维Otsu分割法对热成像灰度图进行分割比较,结果如图5~图6所示。

图5 分割区域在图像边缘
通过比较图4与图5中三种算法分割的效果图,可以看出,一维otsu算法中接线柱可以被粗略分割出来,但包含大量白色噪声点,产生较大误差,分割效果不佳;二维otsu算法中接线柱都被准确地分割出来,白色噪声点较少,分割效果良好。对比表1和表2中传统二维Otsu算法与本文算法得到的阈值,二者计算结果接近,因此能够得出本文算法具有同传统二维Otsu算法一样的抗噪分割能力。

表1 分割区域在中心的算法对比

表2 分割区域在边缘的算法比较
通过比较表1和表2中两种二维Otsu算法的运行时间,可以看出,相比传统二维Otsu算法,本文算法运行时间极大缩短。综上,不论分割区域在图像中心还是边缘位置,本文算法在保证分割效果的同时极大地缩短了运行时间,有很好的可行性和高效性。
同时,参数设置的调整也会影响实验结果和运行时间。针对本文的改进算法,以分割区域在边缘的图像为对象,调整迭代次数MG和种群数量num进行多次实验,仿真结果如表2~表3所示。
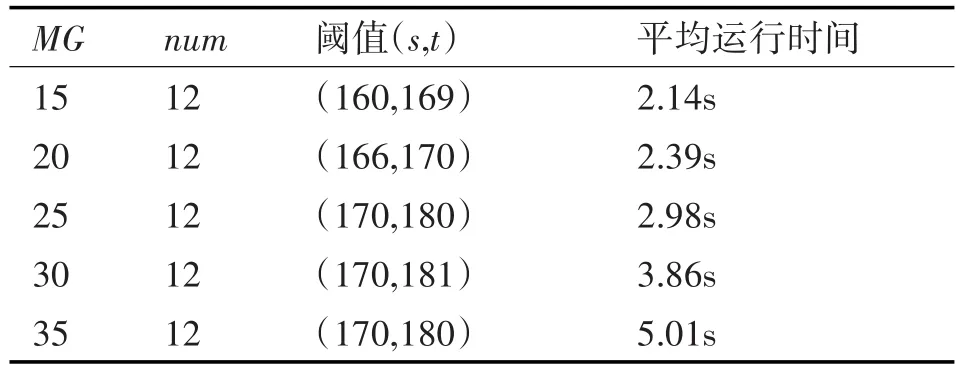
表3 迭代次数对仿真的影响

表4 种群数量对仿真的影响
从表2和表3中可以看出,迭代次数MG影响效果比较明显,而种群数量num相对影响效果弱。迭代次数不足25次时,计算并未收敛,而超过25次后只是徒增计算时间,种群数量也是如此,当随着迭代次数和种群数量的增多,计算结果逐渐准确,只需选取达到精度的最小迭代次数和种群数量即可,从而可以看出本文选取实验参数较优。
4 结语
热成像因其低成本非接触的优点,已经成为一种电机状态监测的辅助技术。Otsu作为最流行的自动阈值分割技术之一,有原理简单效果明显等优点,同时也有抗噪能力差等缺点,二维Otsu提升了抗噪能力,但增大了计算量。为了缩短计算时间,本文将群智能算法与二维Otsu结合,提出基于引入模拟退火因子的萤火算法的二维Otsu图像阈值分割算法,将二维Otsu的阈值求解作为萤火虫算法的目标函数进行寻优,通过对比实验得出本文的算法阈值选取图像分割效果良好,并且计算时间和实时性都有很大的改进,因此说明本文算法能够高效快速分割电机灰度图,为未来电机故障时实时处理大量故障热图提供技术参考,为图像分割后再实时分析处理做下基础。
猜你喜欢
兵器装备工程学报(2022年8期)2022-09-13
现代电子技术(2022年11期)2022-06-14
建材发展导向(2021年19期)2021-12-06
计算机仿真(2021年6期)2021-11-17
现代计算机(2021年10期)2021-05-28
集装箱化(2021年1期)2021-04-12
中国信息技术教育(2020年2期)2020-02-02
科学大观园(2019年10期)2019-09-10
证券市场周刊(2019年19期)2019-05-27
中国经济周刊(2019年9期)2019-05-24