电动汽车永磁同步电机控制策略
2022-01-06 12:21宋毓聪郭淑清
内燃机与配件 2022年1期
宋毓聪 郭淑清





摘要: 永磁同步电机(PMSM)由于尺寸小、质量轻、功率密度高等特点,符合电动汽车驱动电机轻量化小型化的发展趋势,逐渐成为主流。但是由于其非线性、强耦合的特点,电机驱动控制系统需要更为先进智能的控制算法进行控制。以永磁同步电机为研究对象,对比分析现阶段永磁同步电机的控制策略。传统控制策略相对成熟且成本低,但鲁棒性和动态响应速度较差,智能控制策略自适应性良好,但缺乏针对电机参数的调节。最佳的PMSM控制策略是结合多种控制策略的复合控制。
Abstract: Permanent Magnet Synchronous Motor (PMSM) has become the mainstream due to its small size, light weight and high power density, which is in line with the development trend of lightweight and miniaturization of electric vehicle drive motors. However, due to its nonlinear and strong coupling characteristics, the motor drive control system needs more advanced and intelligent control algorithms. Permanent magnet synchronous motor as the research object, comparative analysis of the current control strategy of permanent magnet synchronous motor. The traditional control strategy has relatively mature technology and low cost, but its robustness and dynamic response speed are poor. The intelligent control strategy has good self-adaptability, but it lacks the adjustment of motor parameters. The optimal PMSM control strategy is a compound control combining multiple control strategies.
关键词: 电动汽车;永磁同步电机;控制策略
Key words: electric vehicle;permanent magnet synchronous motor;control strategy
中图分类号:U472.43 文献标识码:A ; 文章编号:1674-957X(2022)01-0062-03
0 引言
驱动电机是电动汽车驱动控制系统的重要组成之一,会对整车的动力性、经济性造成极大影响。PMSM具有体积小、重量轻、可靠性高、调速范围宽、动态响应快等一系列特点,非常适合我国大城市交通拥堵的国情。但PMSM也有弊端,需要更先进智能的控制算法来解决非线性强耦合的难题。
国内外的研究团队为了解决PMSM能在复杂环境运行时依旧保持良好的鲁棒性和抗干扰能力,对其控制策略进行了大量的研究试验。在二十世纪70年代,西门子工程师提出了矢量控制技术(Field Orientation Control,FOC),利用坐标变换和矢量解耦,将交流电机控制变得像直流电机控制一样简单,但是矢量控制算法复杂,控制器也容易受到影响[1]。80年代,德国的Depenbrock学者提出了直接转矩控制(Direct Torque Control,DTC),采用空间矢量分析在定子坐标系内计算并直接控制电机的磁链和转矩[2]。但是在低速时转矩和磁链脉动比较大,控制精度低。2014年,李政等人提出了一种积分型滑模变结构控制的PMSM调速系统,采用的积分型滑模面,在常规滑模面中加入狀态量的积分量,消除稳态误差,提高全局鲁棒性[3]。2016年,张文霞提出了一种基于模糊PID控制的PMSM控制策略,利用模糊PID控制温度变化,提高系统的可靠性、稳定性[4]。刘旭东提出了基于广义预测控制和扰动补偿的PMSM控制策略,优化速度跟踪控制器,降低外部扰动引起的控制性能下降,提高了鲁棒性[5]。
以上提出的多种控制策略,其根本目的在于提升电机的鲁棒性和动态响应速度,下面从电机控制策略的工作原理、基本结构框图、优缺点等对多种控制策略进行分析。
1 永磁同步电机工作原理
电动机的工作原理是基于定子绕组中的电流和转子磁场之间的相互作用。
如图1所示,当电机转子产生的永磁体直流磁场为d轴静磁场时,空间中没有旋转磁场。当三相定子绕组通直流电时,会产生相应的直流磁场。在合理控制各相绕组电流强度的前提下,两个直流磁场就像磁铁一样,产生相互作用力。由于定子绕组不能移动,转子磁场受到旋转力的影响。
磁场相对位置的变化会导致两者间的作用力变化并且不会保持恒定,通常在定子绕组中放置正弦点,形成等效的旋转磁铁。
2 PMSM控制策略
电机性能的表现与电机的控制调速策略的选择和优化有很大的关系。目前应用广泛的控制策略有:矢量控制,直接转矩控制,滑模变结构控制(Sliding Mode Control,SMC)[6-7],模型预测控制(Model Predictive Control,MPC)[5],智能控制等等。
2.1 矢量控制
矢量控制技术通过借鉴直流电机的模型和控制方式来独立控制各个参数,利用坐标变换,对电机定子电流中的励磁电流和转矩电流分别控制,实现磁场和转矩的解耦控制,达到直流电机一般的控制性能。
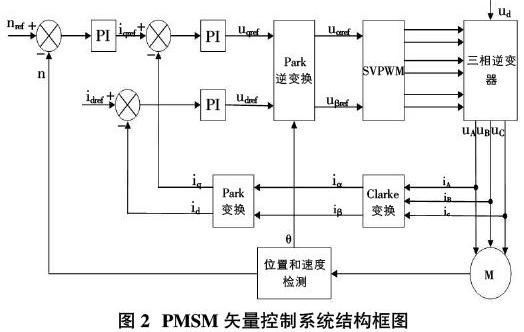
FOC属于闭环控制策略,在确定三相静止坐标系后,采集计算各项参数,通过Clarke变换转换为两相静止坐标系解决耦合问题,再通过Park变换实现快速实时的控制。控制过程一般由两或三个闭环环节构成,工作时首先经过外环参数调节,然后再依次输入到内环调节,通过PI调节器计算实际参数与目标参数的误差后,最终完成闭环数据的采集和调整。图2所示为PMSM矢量控制技术原理框图。
FOC在调速过程中PMSM的数学模型比较复杂,控制效果容易受到电机参数和外界因素的影响,造成电动汽车的行驶性能下降。
2.2 直接转矩控制
直接转矩控制技术对PMSM的控制原理是基于电压型逆变器输出的电压空间矢量对电机定子磁场和转矩的控制作用上。
该变频调速系统直接采用电机电磁转矩的闭环控制。通过在定子静止坐标系中独立控制电机定子磁链和电磁扭矩,在恰当的时间点选择最佳的电压空间矢量,使两者达到近似的解耦效果。图3所示为直接转矩控制系统结构框图。
DTC由于去除了复杂的坐标变换,控制相比于FOC更简单。同时没有电流调节单元,就不需要对定子电流的磁场分量与转矩分量进行闭环控制。但是这种控制会对电机造成不小的抖动,而且无法同时满足电机低速与高速运行。
2.3 滑模变结构控制
滑模变结构控制作为一种特殊的非线性控制方法,它的最大优势为控制的不连续性。通过在不同控制作用之间的切换,产生一种与原系统无关,按照预定“滑动模态”的状态轨迹的运动。
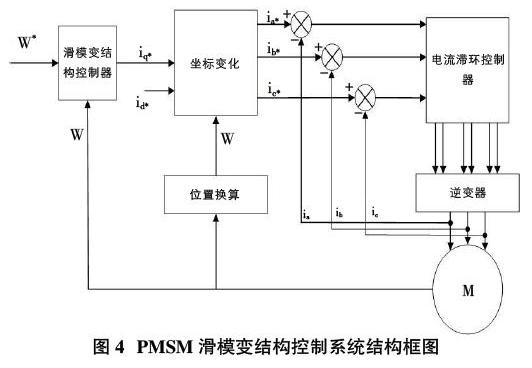
整个控制过程首先根据系统期望的动态特性设计滑模面。然后利用滑模控制器使系统从滑模面之外的初始状态开始向滑模面运动。当系统到达滑模面时,滑模控制器控制系统沿滑模面到达系统原点。图4所示为滑膜变结构控制系统结构框图。
SMC的滑动模态可以设计且与对象参数和扰动无关,具有快速响应、对参数变化和扰动不灵敏的优势。然而,SMC在本质上的不连续开关特性将会引起系统的抖振。这会破坏系统滑动模态的运行条件,国内外主要通过改进滑模趋近律以此降低抖振。
2.4 模型预测控制
2004 年Rodriguez率先将模型预测控制应用于PMSM驱动系统中。MPC由于能有效地处理多目标、多变量和多约束的问题,在电机控制领域得到广泛应用。
预测控制系统的结构框图如图5所示。简单将算法控制概括为三步:第一步预测系统未来动态;第二步采用预设的价值函数求解开环优化问题;第三步将优化解的第一个元素作用于系统。以上三步在每一次的采样时刻都会重复进行,每个时刻采样的测量值也都会作为当前时刻预测系统未来动态的初始条件。
由于MPC对模型的精度要求不高,建模方便,可利用收集实时信息校正控制过程中的各种复杂情况,所以具备良好的鲁棒性和动态性能。但MPC缺点在于抗干扰能力和对模型的适应性方面不强。
2.5 智能控制
人工智能的发展及其应用推广促进了自动控制向智能控制阶段的发展。由于智能控制效果具有很强的自适应能力,所以特别适合非线性、时变、复杂不确定的控制对象。常见的有模糊控制(Fuzzy Control,FC)、径向基函数神经网络控制(Redial Basis Function-Neural Network Control,RBF-NNC)[8]等都属于智能控制的范畴。
2.5.1 模糊控制
模糊控制是利用模糊数学的基本思想和理论,从行为上模仿人的模糊推理和决策过程的一种智能控制方法。该方法首先将人类专家对特定的被控对象或过程的控制策略编成模糊规则,通过将传感器的实时信号模糊化并作为模糊规则的输入,完成模糊推理,将推理后得到的输出量加到执行器上。模糊控制系统的结构框图如图6所示。
模糊控制系统设计简单,自适应性和鲁棒性良好,干扰和参数变化对控制效果的影响被大大减弱,是一种非常简单有效的智能控制方法。但是过于简单的信息模糊处理会对系统的控制精度和动态品质造成影响。
2.5.2 RBF神经网络控制
模糊控制和RBF神经网络控制都属于智能控制,但最大的不同在于前者以人的经验为出发点,以便解决人类的控制语言描述和推理等相关问题;后者从人脑的生理心理学出发,人工模拟大脑的工作机制实现智能操作。
1988年,C.Darken和J.Moody提出了拥有单隐层的三层前馈网络,称为径向基函数(RBF)神经网络。它主要是通过模拟人脑中接收区域和局部调整的神经网络结构,可以以任意精度来逼近任何连续函数。第一层是由信号源节点组成的输入层,即图中X所代表的部分,用来传输信号。第二层是隐含层H,隐单元数视所描述问题的需要而定。第三层为输出层Y,是对输入模式做出的响应。输出层和隐含层的优化策略不同,前者是对线性权调整,后者是对高斯函数参数调整。RBF神经网络的拓扑结构如图7所示。
RBF神经网络的优点在于它的逼近能力,由于其独特的结构,使得分类能力和学习速度异常优秀,避免了局部极小值问题。但是目前RBF神经网络对PMSM的参数调节还不能做到全部,如何能以更优化的方法控制电机需要进一步的研究试验。
3 结论
本文介绍了电动汽车永磁同步电机以及相应的控制策略,分析了目前永磁同步电机相较于其他电机的优势所在,详细阐述了永磁同步电机的工作原理及相关控制策略。FOC和DTC作为目前PMSM最为经典的控制技术,技术成熟,应用广泛,但是,FOC对电机参数依赖过大,DTC的稳态转矩脉动过大,都无法满足PMSM高精度的控制要求。SMC的动态性能良好,但是抖振问题无法有效解决,会造成PMSM的机械损失。预测控制和智能控制的未來前景非常广阔,针对目前竞争激烈的市场环境,永磁同步电机的优势还远远无法将其它电机取代,如何能更有效地运用电驱控制策略,将智能控制策略与传统控制策略融合,解决PMSM在复杂环境下仍然保持良好的鲁棒性和抗干扰能力,进一步提升性能优势。
参考文献:
[1]秦福峰.纯电动汽车新型内置式永磁同步电机设计与控制研究[D].江苏大学,2016.
[2]吴霏.电动汽车驱动永磁同步电机控制策略研究[D].重庆理工大学,2019.
[3]李政,胡广大,崔家瑞,刘广一.永磁同步电机调速系统的积分型滑模变结构控制[J].中国电机工程学报,2014,34(03):431-437.
[4]张文霞.基于模糊PID的永磁同步电机控制系统研究[D].温州大学,2016.
[5]刘旭东.基于预测控制的电动汽车用永磁同步电机控制策略与关键技术研究[D].山东大学,2016.
[6]汪海波,周波,方斯琛.永磁同步电机调速系统的滑模控制[J].电工技术学报,2009,24(09):71-77.
[7]齐亮.基于滑模变结构方法的永磁同步电机控制问题研究及应用[D].华东理工大学,2013.
[8]吴非非.基于模糊RBF神经网络的永磁同步电机控制系统研究[D].大连交通大学,2020.
猜你喜欢
中国典型病例大全(2022年7期)2022-04-22
内燃机与配件(2022年2期)2022-01-17
内燃机与配件(2022年2期)2022-01-17
电机与控制学报(2018年9期)2018-05-14
电子技术与软件工程(2016年24期)2017-02-23
汽车工程学报(2016年5期)2017-01-16
计算技术与自动化(2016年4期)2017-01-11
科技视界(2016年12期)2016-05-25
投资北京(2016年6期)2016-05-14
世界汽车(2015年3期)2015-09-10