
免像控无人机摄影测量开采沉陷监测方法研究
2022-01-07 09:17廉旭刚刘晓宇员鸿燕3
金属矿山 2021年12期
廉旭刚 王 站 刘晓宇 员鸿燕3
(1.太原理工大学矿业工程学院,山西 太原 030024;2.山西冶金岩土工程勘察有限公司第一分公司,山西 临汾 041000;3.山西工程科技职业大学交通工程学院,山西 晋中 030619)
矿区开采沉陷区变形及生态环境监测数据是矿山生态修复治理的重要依据[1]。采用水准仪、全站仪、GNSS等传统开采沉陷监测手段费时费力,且单点监测方式适用性不强;InSAR监测虽然具有监测覆盖大、精度高等优点,但其沉降监测梯度有限[2]。随着无人机技术及其搭载传感器的不断成熟,因其灵活性、效率高、高时空分辨率、低成本、操作方便等优势[3-4],使得在矿区、农业、林业监测等领域得到了应用,并取得了显著成效[5-6]。近年来,在生态修复方面,一些学者采用无人机遥感技术开展了采煤沉陷区的耕地及积水区范围提取[7-8]、耕地质量评价[9]、农作物生长状态评估[10-11]、植被分类[12]等研究;在采动地面灾害监测方面,无人机低空遥感手段被用于采动滑坡、崩落、地裂缝[13-14]、塌陷坑[15]及灾害预测[16]研究。
针对传统开采沉陷监测方法的不足,近年来研究人员采用无人机搭载激光雷达和高分辨率相机进行矿区地面沉降监测,并且取得了一定成效。无人机在矿区的应用虽然处于起步阶段,但在速度、规模和服务范围方面发展迅速[17],ESPOSITO等[18]、ĆWIAKALA 等[19]、葛林林等[20]、高冠杰等[21]、周大伟等[22]采用无人机摄影测量技术对煤矿开采地表沉陷进行了监测,取得了一定成效;汤伏全等[23]、张永庭等[24]基于无人机LiDAR技术对榆神矿区采煤沉陷建模方法进行了改进。本研究在上述成果的基础上,以山西某矿区为例,采用免像控无人机摄影测量技术进行开采沉陷监测,进一步提高该方法的自动化程度。
1 研究区概况
研究区位于太行山北段西侧刘备山的南麓低中山区。地表地形复杂,沟谷纵横,属大陆性半干旱气候,降雨主要集中在7—9 3个月,占全年总降水量的71%~91%。如图1所示,相向开采的工作面A开采15#煤层,采深400~545 m,采厚6.5 m,长度1 200 m,宽度200 m,推进速度3.3 m/d;工作面B开采8#煤层,采深336~506 m,采厚2.9 m,长度1 190 m,宽度220 m,推进速度5.2 m/d。两工作面水平方向距离32 m,垂直间距平均51 m,均采用长壁式一次采全高采煤方法,顶板全部垮落。上覆岩层以泥岩、砂质泥岩为主,砂岩厚度为30~45 m,黄土层厚度5~10 m。本研究在图1中布设了a、b、c3条观测线验证无人机摄影测量方法的精度。
2 无人机摄影测量数据采集及处理
2.1 数据采集
数据采集使用某型号无人机航测系统,搭载索尼A6000相机,有效像素2 430万,航向和旁向重叠分别为80%和60%,采用仿地飞行,飞行速度14 m/s,地面像素分辨率为4 cm。在2019年9月、2019年11月、2020年1月、2020年5月、2020年9月进行了5次数据采集,共采集全彩色照片3 400幅。地表观测线a、b、c的测点间距为30 m,采用全站仪进行了4次(对应于无人机前4次采集时间)沉降观测。
2.2 数据处理
数据处理流程见图2,采用实时动态载波相位差分技术(RTK)融合GNSS动态后处理差分技术(PPK)辅助空三解算,提高空三加密的精度,以实现免像控的目的。尽管RTK可以实现高精度的单点定位,但对于快速飞行的无人机而言易造成卫星失锁现象,融合PPK技术可以通过反向卡尔曼滤波,解决失锁时间段内的历元数据,从而提高固定速率和定位精度。
采用无人机摄影测量技术进行地表沉降监测的关键是获取高精度数字高程模型(DEM),而实际的地表存在建筑物及植被等非地面点,即为数字表面模型(DSM)。从DSM到DEM需要进行点云滤波,点云滤波的原始数据即为该区域的多视影像密集匹配点云。使用Terrascan软件中的自动滤波工具获得初始滤波结果,并通过手动分类工具对初始结果进行改进,以保证DEM质量。通过可视化点云的横截面手工检测相应的点云,并纠正错误分类的点。研究区域局部的点云滤波前后效果对比如图3所示。
3 开采沉陷结果分析
3.1 动态沉陷盆地及其精度分析
选取一期点云数据滤波后进行插值算法对比试验,分别使用克里金插值、反距离权重插值、自然邻点插值和线性插值4种方法绘制了等值线图,如图4所示。可见,自然邻点插值和线性插值在图像边界处对于地形表达的真实性不及克里金插值法和反距离权重插值法。

为了进一步验证各种插值方法的精度,在实地使用RTK采集检查点的三维坐标,以此高程数据作为测量的真值与利用平面坐标查找的等值线插值高程进行比较,进而计算精度[25-27]。通过插值比较得出,利用不同插值方法得出的高程不同,其中克里金插值和反距离权重插值的高程较接近实际观测值,可以确定这两种插值方法的数据比较可靠。但在复杂地区且无人机影像匹配密集点云数据量较大的情况下,克里金插值计算量较大,较为耗时。综上分析,本研究采用反距离权重插值法。
对点云滤波之后得到的地面点云统一进行反距离加权插值处理得到各期DEM,将2019年9月首次无人机观测获得的DEM分别减去2019年11月、2020年1月、2020年5月和2020年9月观测获得的DEM,得到如图5所示的工作面开采引起的地表下沉盆地的动态发展情况,结果分别对应于图5(a)、图5(b)、图5(c)和图5(d)。在监测时段内,两个工作面及附近地表均有不同程度的沉降,随着工作面的推进,A-15#和B-8#工作面地表最大下沉值逐渐增大,下沉盆地范围不断扩大。B-8#和A-15#两个工作面沉陷区域分别向南和北方向延伸,与工作面开采方向一致。由图 5(c)到图 5(d)的过程中,在A-15#工作面中心最大下沉值和整体沉陷盆地范围变化不明显。
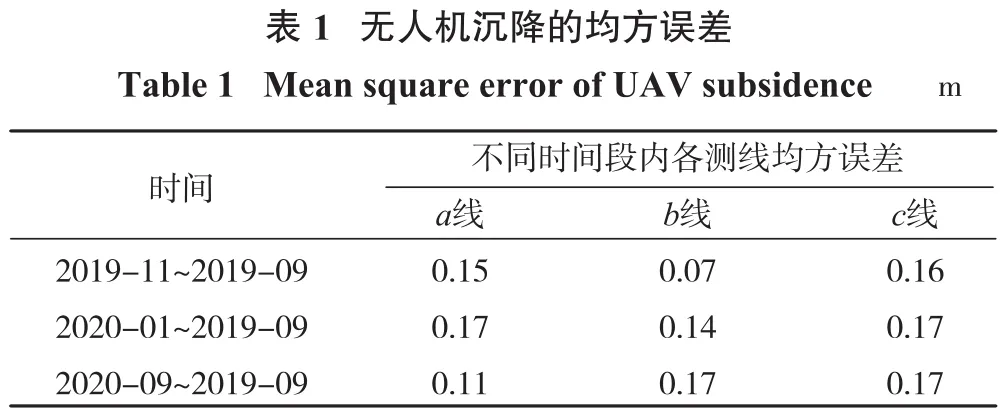
本研究通过无人机相应时间段DEM的高程减去两个时段相应点的全站仪高程,计算无人机沉降盆地数据的均方误差(M),公式为


式中,n为用于对比的点数,个;Δ为DEM与全站仪沉陷值的差值,m。
计算结果表明:沉降值的最大均方误差为0.17 m,最小均方误差为0.07 m,平均均方误差为0.15 m(表1)。
不同时间段内全站仪与无人机获取的下沉曲线对比见图6,其中不连续部分是由于部分监测点遭受破坏而未获得全站仪观测数据所致。
由图6可知:图6(b2)、图6(b3)、图6(c3)中左侧的矩形下沉量较小的区域,无人机数据跳点较多,与全站仪实测数据偏差较大,在图6(b2)、图6(b3)、图6(c2)、图6(c3)中右侧虚线矩形区域中最大下沉值附近偏差减小,两条曲线趋势也较为接近。倾向b线和c线下沉值与下沉范围随着工作面的推进下沉幅度逐步增大,呈现两侧平缓、边缘较陡、底部较狭窄的“V”型曲线,走向a线由于对称布设半条,未能全部显示工作面的下沉曲线发展情况。
3.2 误差来源及分析
统一点云滤波算法和插值算法所构建的无人机沉陷DEM仍然存在明显误差,综合图5和图6可知,无人机沉陷监测中DEM误差主要来源于以下几方面:
(1)无人机容易受到一些内部或外部因素的影响。仪器传感器量化过程中带来的系统误差以及天气状况对飞行器姿态和成像质量的影响产生的误差会影响无人机数据质量。因此每次无人机采集数据前都需要考虑天气情况,选择空气洁净、光照充足的时间段,选用成像质量好的相机进行航摄,数据后处理解算差分POS数据提高定位精度。
(2)滤波算法未去除的非地面点引起的模型误差。点云滤波算法的局限性导致非地面点不能完全去除,以及数据采集覆盖不同的季节,研究区植物的生长状况会有差异,植被茂密时会降低所获取DEM的精度。可通过多项式拟合或邻域平均等方法减少噪声来降低该类误差,也可以选取冬季或春季采集数据,尽量减小植被对无人机数据精度的影响。
(3)采用点云内插算法生成格网DEM引起的模型误差。点云内插会造成精度损失,尤其是在地形变化复杂和点云密度较低的地区,可通过改进点云插值算法或几种插值算法优选减小这类误差。
(4)影像分辨率的限制。影像分辨率越高,影像密集匹配和空中三角测量过程中精度就会越高。但是要求无人机降低飞行高度、减小飞行速度及设置更小的地面采用距离,会导致总体航摄效率会下降,增加无人机飞行的安全风险,可通过适度提高影像地面分辨率来解决。
3.3 主断面沉降特征分析
为了更直观地反映本研究沉陷DEM监测情况,基于2019-11—2019-09、2020-01—2019.09和2020-05—2019-09 3期沉陷DEM提取A-15#和B-8#两个工作面走向主断面下沉剖面数据,对3期数据进行Savitzky-Golay平滑去噪[28]。该滤波器是一个基于多项式拟合方法的低通滤波器,相对于低频信号变化 缓慢,波形平滑,相对于高频信号变化非常快,波形有突变。无人机数据中存在因飞行过程中姿态不稳引起的高程跳点较多的情况,因此Savitzky-Golay平滑适合于剔除无人机数据中的高程突变噪声。


?
该方法对于提取的无人机数据有较好的平滑效果,尽可能保留了沉陷盆地底部有效的沉陷信息。Savitzky-Golay平滑滤波的效果随着选取窗口宽度的不同而不同,可以满足多种不同场合的需求[25]。

无人机沉陷DEM两个工作面走向下沉主断面的下沉曲线如图7所示。剖面路径起点位置和目标位置确定,方向均由北到南,图中最大下沉值分别向靠近原点和远离原点方向偏移,这与两个工作面的开采方向一致。图7(a)中2020-05—2019-09曲线最大下沉值为2 912 mm,实测最大值为2 892 mm,误差为20 mm,占实测走向最大下沉值的0.69%。总体来看,采用无人机监测矿区沉陷能够较为全面地反映出矿区沉陷影响范围,最大下沉值的监测精度较高。
4 结论
(1)本研究提出了一种基于免像控无人机摄影测量的矿区沉陷监测方法,阐述了无人机摄影测量矿区监测作业的实际工作流程,构建了基于差分DEM的动态沉陷盆地模型,并验证了无人机沉陷监测的精度,讨论了随着工作面推进沉陷盆地发展情况和盆地主断面下沉规律。
(2)免像控无人机摄影测量技术为在矿区受到地形限制或人员难以进入的区域提供了一种安全、可靠、灵活的地表沉陷监测方法;无人机摄影测量产品精度受到数据集质量、研究区域特征、飞行参数设置、滤波插值过程引入的模型误差以及使用的处理工具等因素影响。
(3)未来需对无人机多时相数据的可重复性进行更全面地评估。根据不同的表面类型进行多重误差评估以产生更真实的地形变化的空间表示。

猜你喜欢
矿产勘查(2020年1期)2020-12-28
矿产勘查(2020年6期)2020-12-25
矿产勘查(2020年5期)2020-12-25
矿产勘查(2020年5期)2020-12-19
矿产勘查(2020年5期)2020-12-19
水电站设计(2020年4期)2020-07-16
工程与建设(2019年3期)2019-10-10
西南石油大学学报(自然科学版)(2019年1期)2019-01-28
电测与仪表(2016年9期)2016-04-12
电测与仪表(2016年10期)2016-04-12
