无轴传动系统多电机同步控制方法研究
2022-01-12 11:57梁定军
工程技术与管理 2021年23期
梁定军
广东美的白色家电技术创新中心有限公司,中国·广东 佛山 528311
1 引言
随着民众生活水平不断提升,对商品精美性的要求也随之提升。由此,印刷行业在此背景影响下,结合现代计算机技术、信息技术等提出无轴印刷技术,并以此取代长轴印刷技术。所谓无轴印刷仅是至设备内部每个机组均处于独立状态,在运动控制器的指令控制下由单独的伺服电动机驱动,进而使得各机组之间呈现出同步运转。
2 无轴传动同步控制系统概述
2.1 无轴传动原理
在一段时间内,机械传动一种占据传动控制系统的主流地位,该形式在实际应用过程中主要由主电机负责驱动各传统轴,利用齿轮机构、联轴器等机械构件为设备内的传动轴输出动力,主轴部件则负责向各个从动单元分配扭矩,机械式变速器对传动轴速度进行控制。该模式的优势在于各个传动轴之间位置以及速度同步性较好,出现同步相位偏差的概率相对较小。但是随着印刷对控制精度、实时控制等要求的不断提升,机械传动的弊端逐渐出现,并被无轴传动所取代。
在无轴传动系统中,纯机械传动结构被取消,各机组由专门的电机负责驱动,整体同步控制方面则通过软件算法集合硬件级联达成。无轴传动系统在实际应用过程中通过通知起发送的信号对各伺服系统进行控制,进而达成设备内各机组同步运转的目的。从本质层面分析,无轴传动技术属于一种综合性传动技术,其实际应用中结合了电子凸轮、电子齿轮、自动控制技术等多种技术。其主要结构如图1所示[1]。

图1 无轴传动系统结构示意图
2.2 同步控制原理
在无轴传动系统设计中,要求各机组达成同步要求,但是考虑到交流伺服电机具备较强的非线性以及强耦合性特征,使得该系统成为非线性、强耦合、实变的多输入多输出系统。通过对相关研究进行整合可知,其主要性能指标要求具备速度以及位置同步。为达成此指标要求,需要控制设备内各电机轴依照一定的速度或是位置进行同步运转。其中,同步关系是受各个受控量应满足某种线性或非线性函数关系,具体如下所示:


为比例系数,在设备被各电机同步比例系数取值为1的条件下,是最简单的同步关系。当同步比例系数如下式情况时,则可认定为比例同步。

所谓多电机同步运转即是指在各电机在速度或位置在瞬态或稳态条件下保持同步运转。在系统实际运行过程中,受静态负载波动、外部环境变化等情况下,不可避免地会导致电机传动速度出现偏差,进而导致不同步问题出现。由此,在实际对系统进行设计过程中,需要对电机速度进行相应调整,以降低出现同步误差的几率。然而,从实际发展情况分析,仅靠伺服驱动系统的内部调控很难实现确保电机同步性的目的。因此,要使系统中的多个电机能够按给定的指标进行同步运行,就必须选用合适而可靠的同步控制策略及控制算法。通过软件算法来模拟各轴之间的传动关系并对各个轴输入量进行实时调节,从而克服系统中导致不同步的干扰因素,实现多电机的实时同步运行。
3 无轴传动多电机同步控制策略
电子虚拟总轴控制策略在是一种模拟机械传动形式的策略。在该模式中,利用电子总轴作为传动动作的主导地位,其他各机组在实际运转过程中跟随电子总轴进行运动,各机组以及电子长轴的耦合利用转矩综合以及反馈实现。其具体结构如图2所示。虚拟的电子总轴是单一的速度调节,它为从属轴提供速度和位置参考值。稳态时,各个轴跟随电子总轴,能够达到很好的同步效果。当一个轴受到干扰或者由于某些原因偏离给定值时,通过转矩的综合和反馈,使电子总轴感受到这种变动,从而迫使其他轴跟随这种变动,实现了在瞬态时各个轴的同步运动[2]。

图2 电子虚拟总轴控制结构框图
3.1 参数设置
相较机械传动结构,电子虚拟总轴的优势在于控制器参数可以灵活调整,同时实际运行过程中无阻尼消耗。因此,在实际应用过程需要对其参数进行调整,以确保其无震荡、快速响应,并具备较强的动态刚度,为各轴同步运转提供基本条件支持。在实际进行参数设置过程中主要分为虚拟总轴设置以及从轴控制器参数设置两方面。
针对从轴控制器参数设置方面,设计者需要依据实际需求的动态响应对阻尼以及刚度进行设置,具体设置原则为系统具备良好的动态响应性能,运行过程中不出现振荡情况,同时具备较强的动态刚度。在实际调整过程中需要认识到对阻尼以及刚度进行调整,分别可以达成获取较好动态相应以及增强系统动态刚度的效果。
3.2 仿真分析
由图2所示的电子虚拟总轴结构框图可知,该策略可以实现扩展至任意多轴的目的。由此,论文研究中以两轴系统为例进行仿真实验。
本次试验过程中假设无扰动状态,在两轴中分别选取不同的转动惯量,其中以及分别设定为0.3kg/m2以及0.1kg/m2,以此实现验证控制策略同步性能的目的。本次试验中涉及的仿真参数包括,其数值分别设计为、30、20、15、10。
电子虚拟总轴控制策略的虚拟主轴是单一的速度调节。因此,在关心速度偏差和位置偏差的同时,也需要对两轴的速度响应情况进行测定。由仿真测试结果可知,在系统不受负载扰动影响的情况下,各轴在经过调整后,其速度相应可以达到跟踪电子总轴速度给定的目的,进而达成消除偏差的目标。
在对其进行具体分析后,可得出如图3、图4所示结果。由图中的信息可知,即使无扰动影响,各轴参数依然存在一定差异,但是在电子虚拟总轴的作用下,利用转矩综合以及反馈可以有效实现在短时间内消除偏差,最终达成同步控制目标。
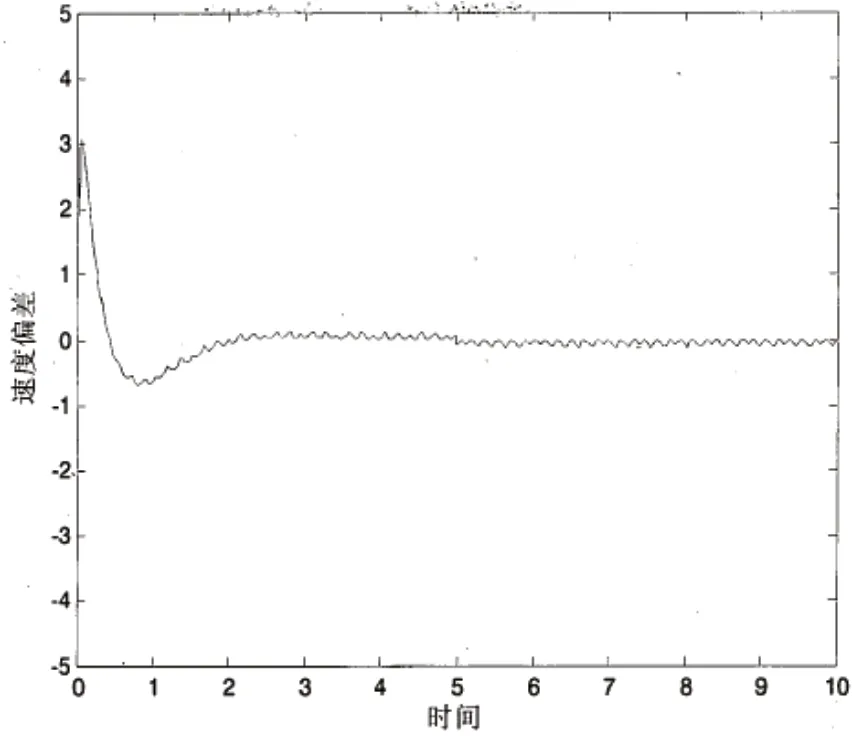
图3 速度偏差
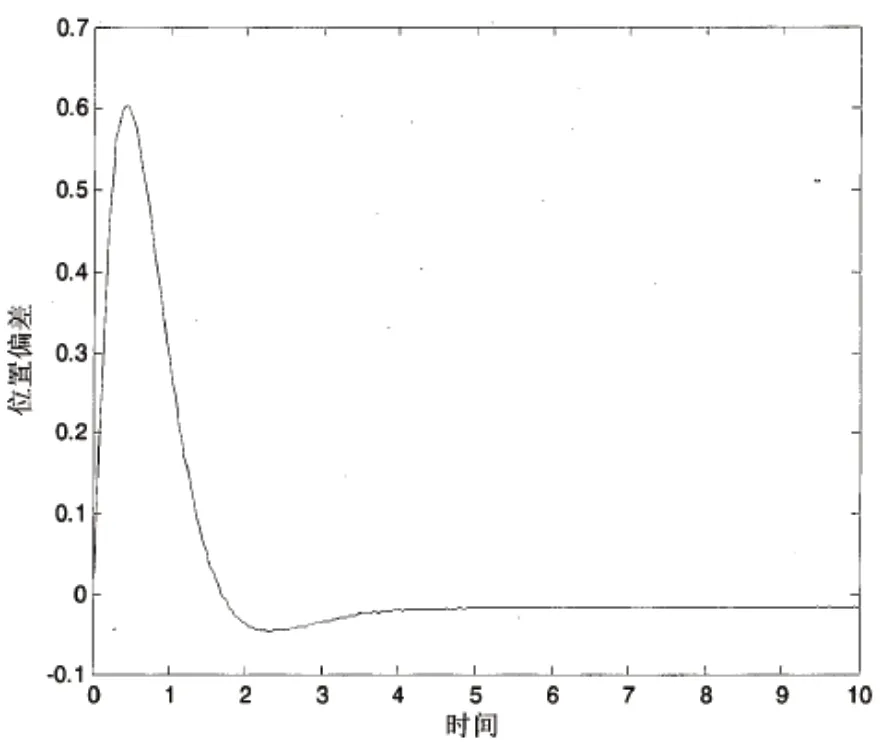
图4 位置偏差
4 结语
综上所述,在当前时代背景下,无轴传动技术已经取代以往机械长轴传动技术的地位。针对当前控制不同步问题,论文以电子虚拟长轴作为解决方案,并进行深入研究。最终仿真结果可知,该技术可以有效消除偏差,进而达成多电机控制同步的目的。由此,此方面具备一定应用价值[3]。
猜你喜欢
物流技术与应用(2022年8期)2022-08-26
物流技术与应用(2020年4期)2020-05-06
小资CHIC!ELEGANCE(2019年28期)2019-09-12
山东冶金(2019年3期)2019-07-10
海峡姐妹(2019年1期)2019-03-23
中国自行车(2018年8期)2018-09-26
消费导刊(2018年10期)2018-08-20
小猕猴智力画刊(2017年12期)2017-12-27
制造技术与机床(2017年3期)2017-06-23
通信电源技术(2016年1期)2016-04-16