浅析基于S7-200可编程控制器的多种液体自动混合的模拟控制
2022-01-14 06:17邓青
中国设备工程 2022年1期
邓青
(江西省井冈山应用科技学校,江西 吉安 343000)
液体混合的机器在医药、食品、化工等行业中的应用很普遍。但这些行业现场生产环境很恶劣,并且要求配料精确、控制可靠,用人工操作和半自动化控制难以实现。利用可编程控制器可满足这些控制要求,不仅在混合过程中控制精确,而且液体混合比例具有稳定性,自动化程度高。本项目的实训在液体混合装置中完成。
1 系统设计要求
某生产车间需要对2种液体按一定比例进行混合,经过加热和搅拌,再放出混合后的液体。SL1、SL2、SL3为液面传感器,液体A、B阀门与混合液体阀门由电磁阀YV1、YV2、YV3控制,M为搅动电机。控制要求如下。
1.1 初始状态
当装置投入运行时,容器内为放空状态。
1.2 启动控制
当按下启动按钮SB1,液体A阀门打开,液体A流入容器。当液面到达SL2时,SL2接通,关闭液体A阀门,打开液体B阀门。液面到达SL1时,关闭液体B阀门,搅动电机开始搅动。搅动电机工作6s后停止搅动,混合液体阀门打开,开始放出混合液体。当液面下降到SL3时,SL3由接通变为断开,再过2s后,容器放空,混合液阀门关闭,开始下一周期。
1.3 停止控制
当前的液体混合操作完毕后。按下停止按钮SB1,停止操作。
2 硬件系统设计
2.1 定义PLC的I/O地址分配(如表1所示)
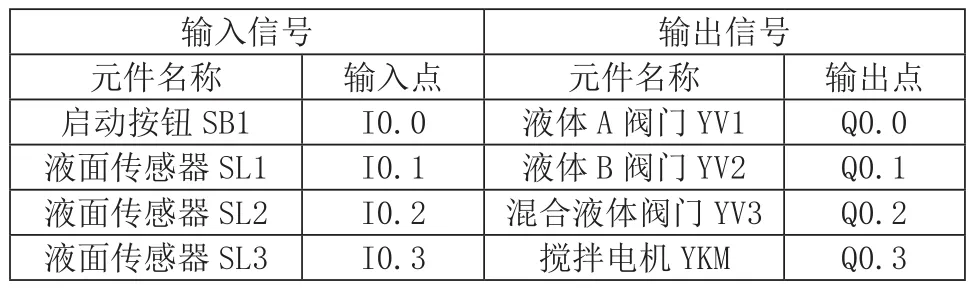
表1 多种液体自动混合控制电路PLC控制I/O地址分配
2.2 进行硬件连线
根据I/O地址分配表,多种液体自动混合模拟控制的接线原理图如图1所示。

图1 液体混合装置控制I/O接线图
3 系统软件设计
使用S7-200 PLC程序设计如图2所示。
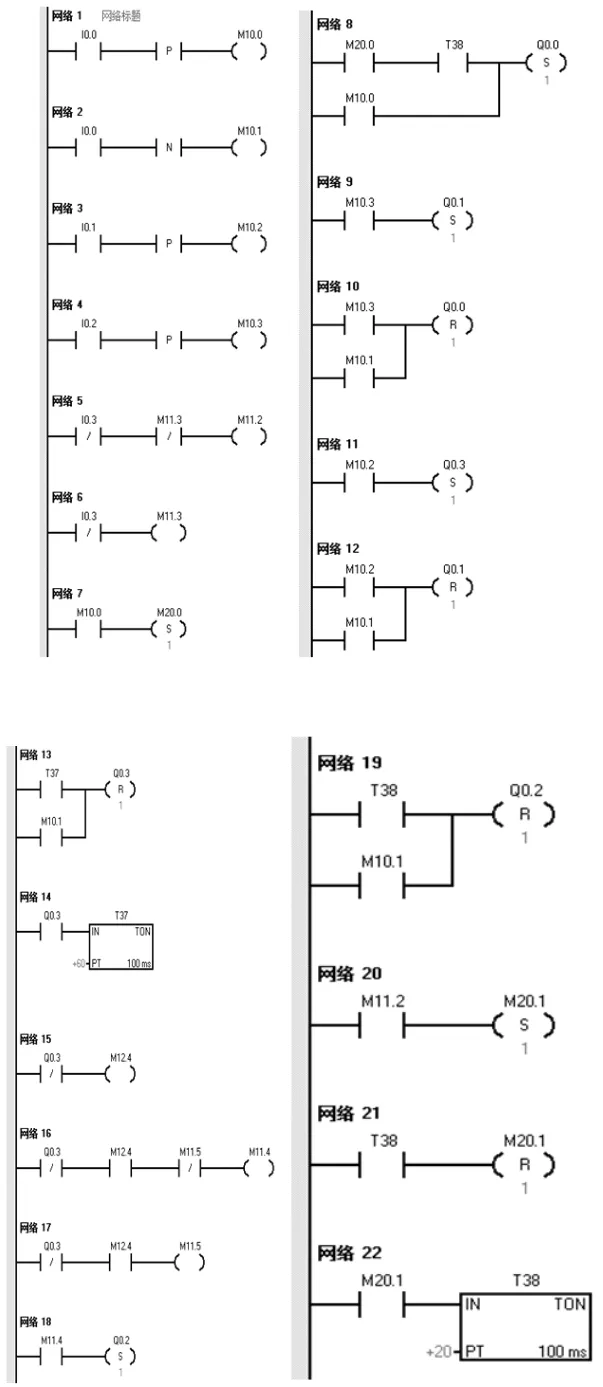
图2 2种液体控制电路梯形图
4 实验效果
(1)当按下启动按钮SB1时,I0.0的动合触点闭合,线圈M10.0接通,M10.0的动合触点闭合,使Q0.0保持接通,液体A阀门打开,液体A流入容器。同时,线圈M20.0保持接通。
(2)当液面上升到SL3时,虽然I0.3接通,但没有引起输出动作。
(3)当液面上升到SL2时,I0.2接通,M10.3线圈接通,M10.3动合触点闭合,复位指令R使线圈Q0.0断开,液体A阀门关闭,液体A停止流入。同时,保持操作指令S使Q0.1线圈接通,液体B阀门打开,液体B流入容器。
(4)当液面上升到SL1时,I0.1接通,线圈M10.2接通,M10.2的动合触点闭合,复位指令R使Q0.1线圈断开,液体B阀门关闭,液体B停止注入。同时,保持操作指令S使Q0.3线圈接通,电机开始工作,开始搅拌。Q0.3的动合触点闭合,启动定时器T37。
(5)6s后,T37定时时间到,T37动合触点闭合,复位指令R使Q0.3线圈断开,电机停止搅拌。Q0.3的动断触点闭合,线圈M12.4接通,M12.4的动合触点闭合,M11.4线圈接通,M11.4的动合触点闭合,保持操作指令S使线圈Q0.2接通,混合液体阀门YV3打开,开始放出混合液体。
(6)当液体下降到SL3时,液面传感器SL3由接通变为断开,此时I0.3断开,I0.3的动断触点闭合,使M11.2线圈接通,M11.2的动合触点接通一个扫描周期,M20.1线圈接通,M20.1动合触点闭合,T38启动定时。
(7)2s后混合液体流完,T38定时时间到,T38动合触点闭合,Q0.2线圈断开,混合液体阀门YV3关闭。同时,Q0.0线圈接通,液体A阀门YV1打开,液体A流入,开始下一次循环。
(8)当按下停止按钮SB1后,线圈M10.1接通1个扫描周期,Q0.0、Q0.1、Q0.2、Q0.3复位,停止工作。
5 系统设计扩展
为了让设计者不仅局限于在实训设备上进行设计和操作,还可以设计基于组态软件的仿真设计。利用动画的形式让设计者能够更直观、形象地看到实验的真实效果,激发初学者的学习兴趣。
通过创建工程,完成仿真画面设计。通过仿真设计可以让初学者直观地看见液体混合装置设计的工艺流程。
建立动画连接。将组态中的画面和数据进行动态连接。
脚本程序编写。在图2中2种液体混合的程序基础上修改为3种或者更多的液体混合控制的程序。综合调试。连接PLC进行联机调试,将编写好的程序下载到触摸屏中,按照控制要求,观察动画效果,实现液体混合控制的工艺流程。
6 结语
经过实验调试和验证,该系统设计稳定,可靠性高。通过程序的修改和接线端子增加还可以应用三种或更多种类的液体混合,适用更广的领域。将工业物联网技术与传统的PLC实训设备相结合,还可以实训远程PLC实验控制系统,不仅适用于辅助教学方式,还可以作为初学者远程自主学习的完美途径。
猜你喜欢
武汉广播影视(2022年6期)2022-12-28
流程工业(2022年3期)2022-06-23
一重技术(2021年5期)2022-01-18
煤气与热力(2021年3期)2021-06-09
军民两用技术与产品(2020年8期)2020-09-07
阅读(科学探秘)(2019年4期)2019-06-19
山东工业技术(2019年13期)2019-05-30
读写算(2018年2期)2018-07-05
中学科技(2014年11期)2014-12-25
中国科技纵横(2014年16期)2014-09-28