
基于坐标系偏移的机器人运动学分析及运动仿真
2022-01-18 03:02徐舟
机械工程与自动化 2021年6期
徐 舟
(库卡机器人制造(上海)有限公司,上海 201616)
0 引言
要控制机器人进行精确的焊接仿真,实现自动化焊接的工业作业,首先要解决机器人运动学建模和逆向运动学的求解问题。
目前主流的运动学建模分析方法有DH建模[1]和旋量理论[2]这两种方法。前者较后者更为常用,更容易上手,后者对数学的理解和掌握更高。DH建模用4个参数表示一个坐标系偏移量,分别是绕z轴旋转θ角,然后沿z轴平移d距离,再沿x轴平移a距离,最后绕x轴旋转α角,虽然只用了4个参数,但是可以看到该方法没有考虑y轴的影响,也就是当相邻的两关节轴平行时,关节轴间的公法线随着轴姿态微小的变化而引起大幅度变化[3],从而导致在机器人误差辨识中不得不再新增一个绕y轴旋转β角来解决该问题[4]。故本文采用基于坐标系偏移的建模方法实现库卡KR10机器人正向运动学建模和逆向运动学求解。基于坐标系偏移的建模方法虽然需要7个参数,但参数共分为两大类,先是3个平移参数,后是4个旋转参数,易理解、易记忆、易使用,建模效率反而比DH的高。为了直观地进行三维仿真,本文采用C#的3D开源库Helix构建了库卡KR10机器人、焊枪、焊板等三维模型,并将Helix控件嵌入基于WPF开发的仿真软件中,实现了焊接运动仿真。
1 基于坐标系偏移的建模方法
如图1所示,根据齐次坐标变换理论[5],可得从坐标系i到坐标系i+1的坐标系偏移公式:

图1 坐标系偏移原理
Ti=Trans(xi,yi,zi)Rot(z,Ai)Rot(y,Bi)×
Rot(x,Ci)Rot(?,θi).
(1)
其中:Trans(xi,yi,zi)表示依次平移xi,yi,zi距离;Rot(z,Ai)表示绕z轴旋转Ai;Rot(y,Bi)表示绕y轴旋转Bi;Rot(x,Ci)表示绕x轴旋转Ci;Rot(?,θi)中的旋转轴编号0表示坐标系可绕z轴旋转θi角度,1表示绕y轴旋转θi角度,2表示绕x轴旋转θi角度。公式(1)中共计7个参数,前3个为平移,后4个为旋转。
式(1)中的各项展开如下:
参考文献[1],标准DH建模公式如下:
Ti=Rot(zi-1,θi)Trans(zi-1,di)Trans(xi,ai)Rot(xi,αi).
(2)
其中:Rot表示绕某个轴旋转;Trans表示沿某个轴平移。
对比式(1)和式(2)可看出,基于坐标系偏移的建模方法更易记忆,更有规律,先是xyz,再是ABC,最后是绕某个轴的旋转。
2 正向运动学
根据以上基于坐标系偏移的建模方法可得6轴机器人的建模公式如下:
(3)

结合库卡KR10机器人的SolidWorks 3D图可得如图2(b)所示运动学建模。根据图2可得如表1所示的机器人建模参数,其中旋转轴编号根据Rot(?,θi)得到。
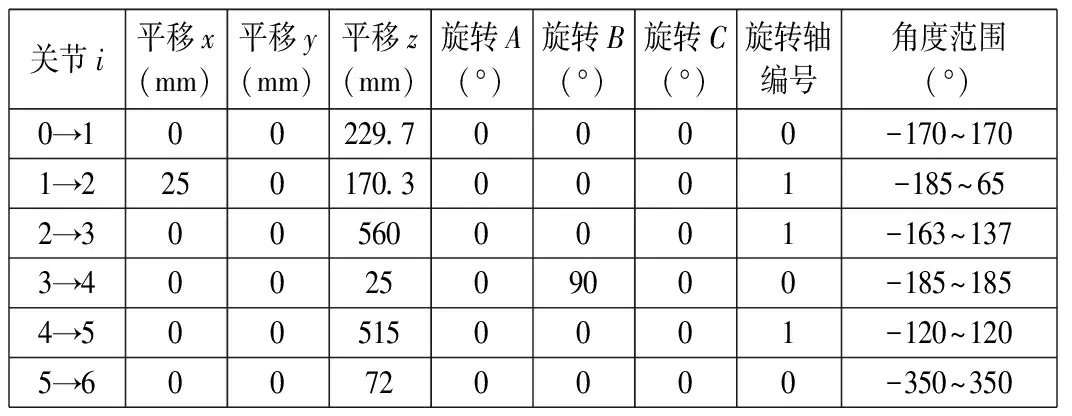
表1 库卡KR10机器人坐标系偏移参数
图2中带箭头的3/4圆表示绕某个轴旋转,这表明该方法不再局限于DH建模中的不能绕y轴旋转。后三个坐标系交汇于一点,满足Pieper原则[6]。

图2 6R机器人的SolidWorks图和坐标系偏移建模
3 逆向运动学
(4)

将表1中平移参数中的非0数值分别表示为x2,z1,z2,z3,z4,z5,z6,联立式(3)和式(4)得:
(5)
并令:
(6)
展开可得:
其中:si和ci分别表示sinθi和cosθi,下文亦然。
(1) 求解θ1。观察L、R矩阵的(2,4)元素,可得到:
pyc1-z6(ayc1-axs1)-pxs1=0.
(7)
推导可得到θ1的两个解:
(8)
(2) 求解θ3、θ2。因矩阵L、R的(1,4)和(3,4)元素分别相等,通过推导首先可得到θ3的两个解:
(9)
继续推导可得θ2的两个解:
θ2=atan2(±I,sqrt(E2+F2-I2))-atan2(F,E).
(10)

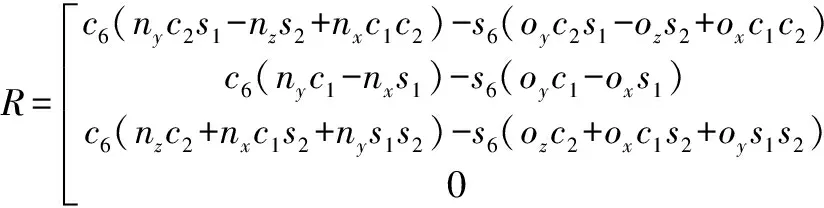
(3) 求解θ5、θ4、θ6。因矩阵L、R的(1,3)和(3,3)元素分别对应相等,经推导可得θ5的两个解:
(11)
其中:L1=Jc3-Ks3,J=axc1c2-azs2+ayc2s1,K=azc2+ays1s2+axc1s2。
因矩阵L、R的(2,3)元素对应相等,可得:
s5s4=ayc1-axs1.
(12)
根据式(12),当θ5=0时,有无穷θ4的解,为统一起见,默认当θ5=0时,θ4=0。故当θ5≠0时有:
(13)
因矩阵L、R的(2,2)元素对应相等,通过推导可得θ6的两个解:

(14)
其中:N=oyc1-oxs1;O=nyc1-nxs1;P=c4。
到此已完成了所有旋转轴θ的求解,并用C#代码实现了以上数学公式的编程和单元测试。
4 仿真软件开发
4.1 WPF和Helix简介
WPF[7]是微软推出以C#语言为基础的基于Windows桌面系统开发的界面框架。Helix[8]是开源的可直接嵌入WPF界面中进行二次开发的3D控件。
4.2 仿真软件框架设计和界面效果
仿真软件的框架基于FluentRibbon、AvalonDock、Prism、MEF等开源库进行二次开发,支持插件化开发,整体架构如图3所示。

图3 仿真软件架构
基于上述框架开发的仿真软件运行效果如图4所示。
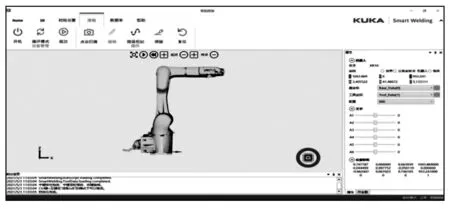
图4 仿真软件实际运行效果图
5 运动学验证和焊接仿真
5.1 正向运动学仿真和验证


表2 正运动学轴坐标输入和位姿矩阵关系
5.2 逆向运动学仿真和验证
在仿真软件中,根据表2右侧的位姿矩阵编写单元测试,可获得表3中的8组逆解数据。表3的灰色行表示的一组解与表2轴坐标一致,该计算表明了逆解的正确性。

表3 根据表2右侧的位姿矩阵计算得到运动学逆解 (°)
5.3 最优解的选择


图5 最短行程法计算流程
5.4 焊接仿真验证
为模拟焊枪在焊板上自动作业一条直线,先通过导入界面导入焊枪模型,并附加到机器人法兰上,然后在导入界面导入焊板模型,最后在机器人属性界面中输入模型的焊缝起点(见图6)和终点坐标(见图7)。

图6 示教焊缝起点 图7 示教焊缝终点
每次输入坐标后可在如图8所示界面记录示教坐标。

图8 示教后在作业图界面中记录坐标
将焊缝直线细分100个点后,结合最短行程法,单击仿真按钮可得焊缝仿真效果,如图9所示。
由图9可看到机器人沿焊板边缘直线走出了一条直线,再次表明了本文的正向和逆向运动学分析的正确性。

图9 焊板的焊缝仿真效果
6 结论
(1) 通过开发软件的运动仿真表明:基于坐标系偏移的建模方法是正确的,每一个偏移矩阵虽有7个参数,多于DH的4个参数,但其实也就两大类参数,先平移后旋转,更易理解和使用。
(2) 基于Helix和WPF开发的运动仿真软件,可直观地可视化三维虚拟世界,实现了焊板的焊缝焊接仿真,所见即所得,为后续实现更复杂的自动化焊接等需求奠定了基础。
猜你喜欢
扬子江诗刊(2020年3期)2020-11-17
扬子江(2020年3期)2020-06-08
河北省科学院学报(2020年1期)2020-05-25
重型机械(2019年3期)2019-08-27
制造技术与机床(2018年11期)2018-11-23
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
中等数学(2017年2期)2017-06-01
环球时报(2016-07-21)2016-07-21
海军航空大学学报(2015年1期)2015-11-11
