
基于并联机器人的块状食品包装定位方法
2022-01-26 09:34王秋红孙以正
包装工程 2022年1期
王秋红,孙以正
基于并联机器人的块状食品包装定位方法
王秋红1,孙以正2
(1.南阳医学高等专科学校,河南 南阳 473061;2.南阳师范学院,河南 南阳 473061)
为提高包装过程中并联机器人定位精度。基于自抗扰控制设计一种机器人末端执行器定位方法。在传统并联机器人结构的基础上配置2台工业相机。根据双目立体视觉检测原理来确定块状食品在生产线上具体位置。为避免干扰因素降低机器人末端执行器抓取精度,设计一种自抗扰控制器,主要包括跟踪微分器、非线性反馈器、扩张状态观测器。最后,搭建实验平台并进行相关验证。实验结果表明,实际位置与抓取位置之间偏差距离的最大值为0.3 mm;平均误差只有0.20 mm。所设计自抗扰控制器与PID控制器相比,响应时间仅增加了1%,平均抓取精度却大幅提高。所述基于并联机器人的块状食品包装定位方法可使末端执行器在非常短的时间内到达指定位置;运动过程稳定、可靠,不会出现振动现象,可确保抓取精度。
并联机器人;食品包装;定位;自抗扰控制
随着工业技术不断发展,包装生产线的自动化和智能化水平越来越高,但是我国包装行业,尤其是食品加工、包装,还是比较依赖人工[1—2]。对于上料、拾取等重复性劳动比较多的工序,仅依靠人工会出现工作强度过大、二次污染等问题[3],因此,食品包装行业需要一种高速、稳定的搬运机器人来取代人工。综合来看,并联机器人具有高精度、高速度、高灵活性等特点,在生产线中的应用比较广泛。并联机器人将驱动装置安装在固定平台上,可以大幅度减小运动平台的重量[4—6]。并联机器人结构比较均衡,所以其承载能力强、运动特性好。在实际应用中,并联机器人主要用于物料分拣和装箱,往往配合视觉系统使用。与人眼类似,机器视觉同样可以实现物料的识别、甄选、判断、检测等诸多功能,同时具有快速识别、非接触、安全卫生等优点[7—8]。严陪陪等[9]为解决食品难于分拣等问题,以并联机器人和视觉技术为基础,设计了一种分拣系统运行方案,但是并没有讨论并联机器人位姿检测、定位控制等问题。郝大孝等[10]设计了一种基于机器视觉的Delta机器人分拣与跟踪系统,在图像处理的基础上提出了一种动态抓取算法,但是并没有考虑干扰因素对抓取精度的影响。张卫芬等[11]设计了一种基于机器视觉的物料自动分拣系统,利用OpenCV完成了相机标定,但是该标定算法采用单目视觉计算过程比较复杂。为解决上述问题,可采用双目视觉代替单目视觉,能够较全面分析物料的空间三维信息,具有检测精度高、计算过程简单等特点。同时结合智能算法,可以克服并联机器人在位姿检测等方面的不足[12]。文中以块状食品包装定位为研究对象,根据双目视觉检测原理完成物料定位同时设计一种自抗扰控制器以实现并联机器人的准确抓取,通过实验验证所述方法的有效性。
1 并联机器人
1.1 基本结构
通常情况下,块状食品的运动方式只存在,,等3个方向平移,不会出现旋转运动,因此,文中选择三自由度并联机器人,其结构见图1。所述并联机器人包括动平台、静平台、运动铰链以及末端执行器等部件。动平台和静平台之间通过运动铰链连接,连接副分别是球面副、转动副。伺服电机作为驱动元件驱动运动铰链绕静平台摆动并将运动传递至末端执行器,进而实现抓取机械手在,,等3个方向的运动。另外,2个工业相机安装在静平台上,以获取进入工作区域的物料信息。
1.2 双目立体视觉检测原理
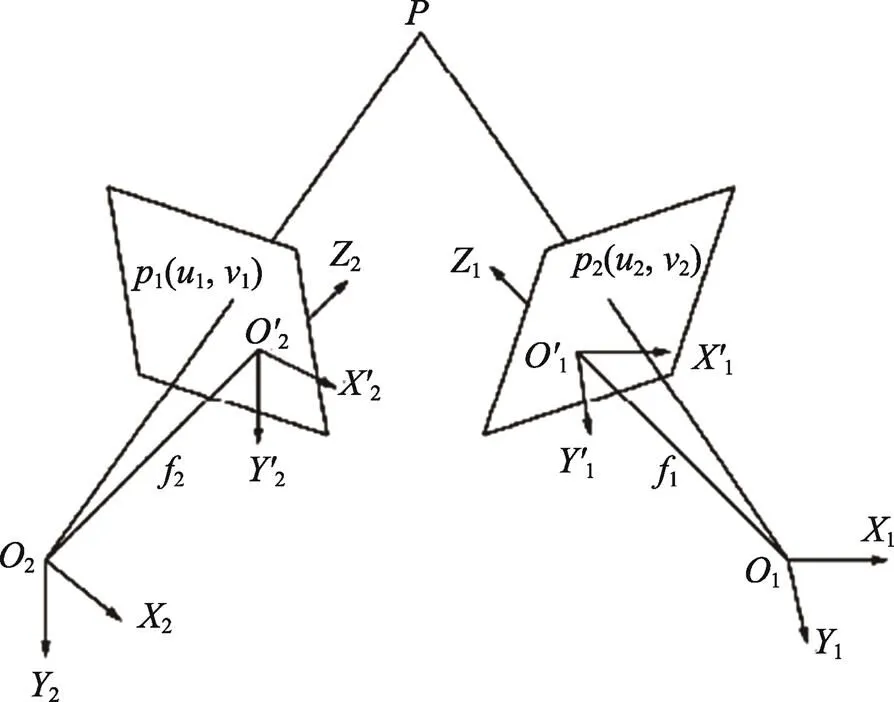
图2 双目立体视觉检测模型
左右2个摄像机坐标系满足以下关系:
(1)
那么空间任意点的三维坐标可以表示为:
(2)
2 自抗扰控制器设计
如前文所述,通过双目视觉可以获取块状食品的位置坐标,而并联机器人末端执行器的位置可通过编码器、姿态传感器、激光仪等传感器得到,二者之差就是定位偏差。为提高并联机器人抓取精度,需要设计一种有效的控制算法。并联机器人在定位、抓取过程中会受到诸多干扰因素影响,例如:关节非线性摩擦、振动、机械制造误差等,其定位精度势必降低。为解决此问题,文中设计了一种自抗扰控制器,见图3。自抗扰控制器主要包括:跟踪微分器、非线性反馈器、扩张状态观测器等,其中跟踪微分器可实现并联机器人总扰动补偿,扩张状态观测器可实现末端执行器位姿的实时在线估计[13—14]。
(3)
(4)
(5)
(6)
(7)
(8)
(9)
作为反馈通道,扩张状态观测器可将未建模部分、外接干扰、参数扰动等因素整合到反馈输入信号中。扩张状态观测器可估算系统的干扰,并通过反馈来弥补整个系统的扰动[15—16]。扩张状态观测器的输出量可描述为:
(10)
(11)
(12)
(13)
(14)
(15)
(16)
图3 自扰动控制器原理
Fig.3 Principle of ADRC
(17)
3 实验研究
为验证所述方法的有效性,文中将自抗扰控制器应用于并联机器人并进行运动控制实验,实验装置见图4。
并联机器人控制系统包括2部分:上位机PC和下位机多轴控制器,二者之间通过以太网实现实时通讯。具体功能方面:上位机配有Intel core i5系列处理器,主频3.6 GHz,负责实现控制系统初始化、实时数据处理、并联机器人运行状态监测等功能;下位机主要包括TURBO PMAC系列主控制卡、ACC-24系列轴控制板卡、ACC-65系列I/O板卡、ACC-E1系列电源板卡等。伺服驱动系统包括3台HG-KR73BJ系列伺服电机和MR-J4系列伺服驱动器。为避免并联机器人行程超出设定范围,将三线式接近开关控制并联机器人运动范围,以保证机器人本体和操作人员安全。
通过上位机设置相关运动参数,上位机根据运动参数计算得到相关控制指令并传送至下位机;下位机通过运动控制器实现并联机器人的实时控制;各传感器数据传送至上位机,实时监测并联机器人运动状态和包装生产线工作状态。
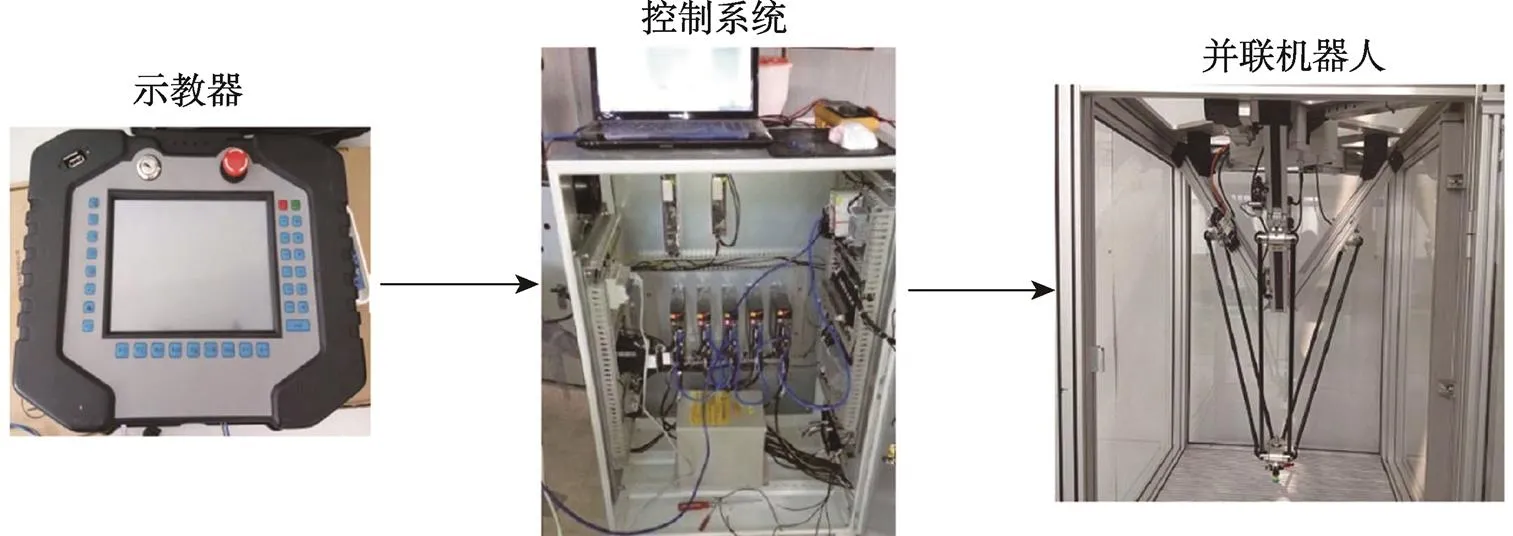
图4 实验装置
在实验过程中,为减轻并联机器人的误差波动使其始终处于平稳状态,可根据反复调试或仿真分析寻找控制器最优参数。控制器参数见表1。

表1 控制器参数
实验对象为块状(方形)食品,传送速度分别设定为100个/min;采用文中所述包装定位方法 进行实验研究,对比块状食品实际位置和并联机械手抓取位置;作为对比,在相同实验条件下,采用PID控制器进行实验,重复整个过程;实验结果见表2。
由表2可以看出,采用文中所述定位方法,实际位置和抓取位置之间偏差距离最大值为0.3 mm;平均误差只有0.20 mm。采用PID控制,实际位置和抓取位置之间偏差距离最大值为5.52 mm;平均误差达到了3.29 mm。对比结果表明,自抗扰控制器能够大幅度提高并联机器人的抓取精度。
在抓取效率方面,与PID控制相比,自抗扰控制器的响应时间并没有大幅度增加。实验结果表明,自抗扰控制器的响应时间仅增加了1%左右,但是其抓取精度比高,因此自抗扰控制器的抓取效率还是高于PID控制器,几乎不会出现错抓、漏抓等情况。稳定性方面,采用文中所述方法,并联机器人稳定性明显提高,不会出现抖动等现象。
综上所述,基于并联机器人的块状食品包装定位方法可使末端执行器在非常短的时间内到达指定位置;运动过程稳定、可靠,不会出现振动现象,可确保抓取精度。
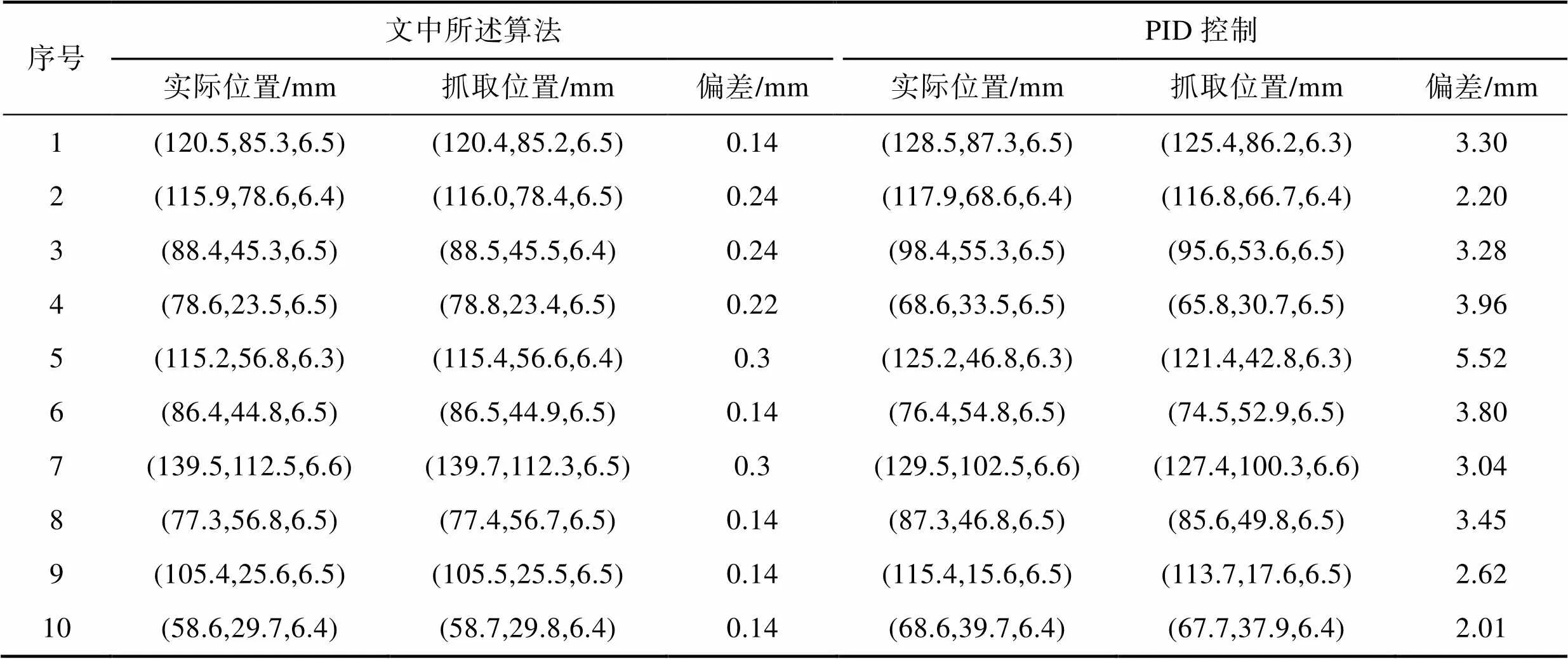
表2 实验结果
4 结语
以食品包装过程并联机器人控制为主要研究对象,利用双目立体视觉捕获块状食品空间位置;在自抗扰控制器作用下,确保机器人末端执行器快速稳定地到达指定位置,进而完成定位、抓取等操作。实验结果表明,所述定位方法具有响应迅速、定位精度高、运行稳定等特点,具有一定的参考价值。
[1] 康晓娟. Delta并联机器人的发展及其在食品工业上的应用[J]. 食品与机械, 2014, 30(5): 167-172.
KANG Xiao-juan. Development and Application of Delta Parallel Robot[J]. Food & Machinery, 2014, 30(5): 167-172.
[2] 李克峰. 块状食品拾放的并联机器人[J]. 食品工业, 2020, 41(10): 222-224.
LI Ke-feng. The Parallel Robot Based on Lumpy Food Packing[J]. The Food Industry, 2020, 41(10): 222-224.
[3] 王诗宇, 林浒, 孙一兰, 等. 基于机器视觉的机器人分拣系统的设计与实现[J]. 组合机床与自动化加工技术, 2017(3): 125-129.
WANG Shi-yu, LIN Hu, SUN Yi-lan, et al. The Research of Industrial Robots Sorting Technology Based on Robot Vision[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2017(3): 125-129.
[4] 邓明星, 刘冠峰, 张国英. 基于Delta并联机器人的传送带动态跟踪[J]. 机械工程与自动化, 2015(1): 153-154.
DENG Ming-xing, LIU Guan-feng, ZHANG Guo-ying. Dynamic Conveyor Tracking for Delta Robot[J]. Mechanical Engineering & Automation, 2015(1): 153-154.
[5] 付瑞玲, 禹春来, 范甜甜. 基于并联机器人的包装分拣系统设计[J]. 包装工程, 2018, 39(11): 204-208.
FU Rui-ling, YU Chun-lai, FAN Tian-tian. Design of Packaging and Sorting System Based on Parallel Robot[J]. Packaging Engineering, 2018, 39(11): 204-208.
[6] 倪鹤鹏, 刘亚男, 张承瑞, 等. 基于机器视觉的Delta机器人分拣系统算法[J]. 机器人, 2016, 38(1): 49-55.
NI He-peng, LIU Ya-nan, ZHANG Cheng-rui, et al. Sorting System Algorithms Based on Machine Vision for Delta Robot[J]. Robot, 2016, 38(1): 49-55.
[7] 王忠勇, 马超. 一种并联机械手视觉引导算法[J]. 计算机测量与控制, 2014, 22(5): 1499-1501.
WANG Zhong-yong, MA Chao. Design of Visual Algorithm for Guiding Parallel Manipulator[J]. Computer Measurement & Control, 2014, 22(5): 1499-1501.
[8] 甄卓, 刘朝英, 宋哲英, 等. 三自由度并联机械手的目标定位和轨迹规划的设计与验证[J]. 电光与控制, 2016, 23(1): 93-96.
ZHEN Zhuo, LIU Chao-ying, SONG Zhe-ying, et al. Design and Verification of Target Localization and Trajectory Planning for 3-DOF Parallel Manipulator[J]. Electronics Optics & Control, 2016, 23(1): 93-96.
[9] 严培培. 面向非典型食品生产的高速机器人分拣系统设计[J]. 食品与机械, 2016, 32(2): 94-97.
YAN Pei-pei. High Speed Sorting Robot for Non-Typical Food Production Systems[J]. Food & Machinery, 2016, 32(2): 94-97.
[10] 郝大孝, 舒志兵, 孙学. 基于机器视觉的Delta机器人分拣与跟踪系统设计[J]. 机床与液压, 2019, 47(17): 36-42.
HAO Da-xiao, SHU Zhi-bing, SUN Xue. Design of Delta Robot Sorting and Tracking System Based on Machine Vision[J]. Machine Tool & Hydraulics, 2019, 47(17): 36-42.
[11] 张卫芬, 汤文成. 基于机器视觉的物料自动分拣系统研究[J]. 组合机床与自动化加工技术, 2019(6): 34-37.
ZHANG Wei-fen, TANG Wen-cheng. Research of the Material Automatic Sorting System Based on Machine Vision[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2019(6): 34-37.
[12] 赵俊伟, 刘珍珍, 黄俊杰, 等. 基于双目视觉的3-PRS并联机构末端位姿检测方法[J]. 制造技术与机床, 2018(1): 101-106.
ZHAO Jun-wei, LIU Zhen-zhen, HUANG Jun-jie, et al. The Method to Measure the Terminal Position and Pose of 3-PRS Parallel Mechanism Based on Binocular Vcision System[J]. Manufacturing Technology & Machine Tool, 2018(1): 101-106.
[13] 张博伟, 李醒飞, 李洪宇, 等. 基于ADRC深海剖面浮标定深控制[J]. 传感器与微系统, 2020, 39(10): 100-103.
ZHANG Bo-wei, LI Xing-fei, LI Hong-yu, et al. Depth Control of Deep-Sea Profiling Float Based on ADRC[J]. Transducer and Microsystem Technologies, 2020, 39(10): 100-103.
[14] 刘福才, 刘林, 郭根旺. 柔性关节空间漂浮机械臂奇异摄动自抗扰控制仿真研究[J]. 高技术通讯, 2020, 30(9): 928-937.
LIU Fu-cai, LIU Lin, GUO Gen-wang. Simulation Study on the Singular Perturbation Based Auto Disturbance Rejection Control for Flexible Joint Space Manipulators[J]. Chinese High Technology Letters, 2020, 30(9): 928-937.
[15] 李小岗, 王红都, 黎明, 等. 水下机器人-机械臂系统的滑模自抗扰控制[J]. 海洋科学, 2020, 44(9): 130-138.
LI Xiao-gang, WANG Hong-du, LI Ming, et al. Sliding Mode Active Disturbance Rejection Control of Underwater Vehicle-manipulator System[J]. Marine Sciences, 2020, 44(9): 130-138.
[16] 李杰, 齐晓慧, 夏元清, 等. 线性/非线性自抗扰切换控制方法研究[J]. 自动化学报, 2016, 42(2): 202-212.
LI Jie, QI Xiao-hui, XIA Yuan-qing, et al. On Linear/Nonlinear Active Disturbance Rejection Switching Control[J]. Acta Automatica Sinica, 2016, 42(2): 202-212.
Positioning Method of Block Food Packaging Based on Parallel Robot
WANG Qiu-hong1, SUN Yi-zheng2
(1.Nanyang Medical College, Nanyang 473061, China; 2.Nanyang Normal University, Nanyang 473061, China)
The work aims to improve the positioning accuracy of parallel robot in the packaging process.A positioning method of robot end-effector based on ADRC was designed. Two industrial cameras were configured on the basis of the traditional parallel robot structure. According to the binocular stereo vision detection principle, the specific position of block food on the production line was determined. An active disturbance rejection controller (ADRC), including tracking differentiator, nonlinear feedback controller and extended state observer, was designed to avoid interference factors reducing the grasping accuracy of the robot end-effector. Finally, the experimental platform was built and relevant verification was carried out. The experimental results showed that the maximum deviation distance between the actual position and the grasping position was 0.3 mm and the average error is only 0.20 mm. Compared with PID controller, the response time of ADRC only increased by 1%, but the average grasping accuracy was greatly improved. The positioning method of block food packaging based on parallel robot can make the end-effector reach the specified position in a very short time. The motion process is stable and reliable, without vibration, which can ensure the grasping accuracy.
parallel robot; food packaging; positioning; auto disturbance rejection control
TP242
A
1001-3563(2022)01-0177-06
10.19554/j.cnki.1001-3563.2022.01.022
2021-01-20
南阳市科技攻关项目(KJGG025)
王秋红(1984—),女,硕士,南阳医学高等专科学校讲师,主要研究方向为机器学习、机器人技术。
猜你喜欢
包装工程(2022年18期)2022-09-26
汽车实用技术(2022年15期)2022-08-19
机械科学与技术(2022年2期)2022-03-30
科技风(2021年10期)2021-04-18
保健与生活(2020年13期)2020-07-24
科学导报·科学工程与电力(2019年44期)2019-09-10
课程教育研究·新教师教学(2016年21期)2017-04-12
戏剧之家(2016年23期)2016-12-20
小学教学研究·新小读者(2014年5期)2014-05-14
浙江中医杂志(2004年11期)2004-02-08
