
新型糖果包装机推糖机构设计
2022-01-26 09:39叶军薛明瑞沈姗姗刘长生叶志超
包装工程 2022年1期
叶军,薛明瑞,沈姗姗,刘长生,叶志超
新型糖果包装机推糖机构设计
叶军,薛明瑞,沈姗姗,刘长生,叶志超
(浙江工业职业技术学院 机电工程学院,绍兴 312000)
设计一种新型糖果包装机的推糖机构,更好地满足糖果包装过程中的工艺要求。采用傅里叶非圆齿轮周转轮系实现糖果包装机推糖机构的工作轨迹,并建立傅里叶非圆齿周转轮系推糖机构的数学模型;根据糖果包装过程中具体的推糖工艺要求,采用Matlab语言编写该机构的辅助设计软件,并通过该软件选取满足要求的机构参数。通过实例计算可知,傅里叶非圆齿轮周转轮系能够实现推糖机构的工作轨迹,具有直线推糖行程长度136.8 mm,且推杆在行程最左段能快速地退出。傅里叶非圆齿轮周转轮系能够很好地实现推糖机构工作轨迹,完成糖果包装的工艺要求。
推糖机构;傅里叶非圆齿轮;Matlab;工作轨迹
扭结式糖果包装机是一种采用柔性包装材料包裹糖果且在两端开口处进行扭结处理的机器[1],在糖果生产中被大量使用。其中,推糖机构是该机器中一个重要的运动部件[2—3],其作用是将被切糖刀分为一定长度的糖块推行至回转的工序盘内,然后完成后续抄纸、扭结等工序,其性能决定着整个糖果包装机的工作效率。
当前的推糖机构为凸轮和五杆组合机构,通过凸轮和五杆机构的配合实现一个近似的直线轨迹[4],用于完成推糖的整个过程,然而整体机构较为庞大,运行中凸轮不可避免会出现磨损,工作效率有待进一步提高。为此,文中在分析扭结式糖果包装机推糖机构的工艺要求基础上,采用傅里叶非圆齿轮周转轮系实现糖果包装机推糖机构的工作轨迹,建立了该机构的数学模型,并得到最终的机构参数。该新型推糖机构具有结构紧凑、工作效率高等特点,并能进一步实现多种工作轨迹,为其他包装机械的设计提供了参考。
1 工艺分析及新型机构
推糖头的理想工艺过程见图1。根据具体工艺过程要求,从图1中可知,推糖行程需要近似的直线轨迹,退回过程中需要避让糖条为凹型曲线。同时在最左边需要较快地退出,而在最右边可以有一定的自由设计尺度,其中最为重要的是保证推糖工作行程。传统推糖机构是由五杆机构和凸轮相互组合而成,因此同时需要2个驱动源才能够实现所需的工作轨迹[5],见图2。
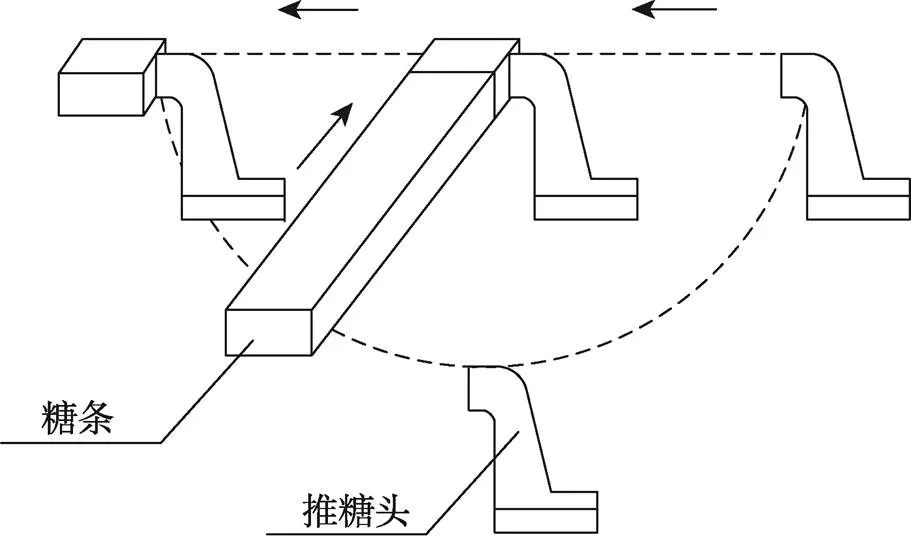
图1 推糖的理想工艺过程
从图2中可知,传统凸轮五杆推糖机构的原理是通过杆转动带动曲柄摇杆机构中的杆进行左右摆动,而凸轮转动带动杆实现上下摆动,由2种运动形成末端点的工作轨迹。为了实现推糖工艺过程所需轨迹,该机构整体结构较为复杂且所需的工作空间较大。同时该凸轮五杆机构难以实现高速运动,无法进一步提高机构工作效率。为此,文中采用傅里叶非圆齿轮周转轮系机构实现糖果包装机推糖机构的工作轨迹,提出了一种新型糖果包装机推糖机构。

图2 传统的推糖机构的结构
傅里叶非圆齿轮周转轮系推糖机构见图3。该机构是由2级傅里叶非圆齿轮副与2R构件组成。其主要结构包括中心傅里叶非圆齿轮1、周转傅里叶非圆齿轮2、第2级主动傅里叶非圆齿轮3、第2级从动傅里叶非圆齿轮4、第1杆5和第2杆6。其中周转傅里叶非圆齿轮2与第2级的主动傅里叶非圆齿轮3是相互固定连接,第2级从动傅里叶非圆齿轮4与第2杆6是相互固定连接,中心傅里叶非圆齿轮1是固定的。其运动原理是将第1杆5进行驱动,安装其上的周转傅里叶非圆齿2绕着中心非傅里叶圆齿轮1旋转,从而带动第2级主动傅里叶非圆齿轮3和从动傅里叶非圆齿轮4相对于第1杆5转动,第2级从动傅里叶非圆齿轮4与第2杆6同步转动,最终实现第2杆6的平面运动。

1.中心傅里叶非圆齿轮 2.周转傅里叶非圆齿轮 3.第2级的主动傅里叶非圆齿轮 4.第2级的从动傅里叶非圆齿轮 5.第1杆 6.第2杆
2 新型推糖机构的数学模型
2.1 傅里叶非圆齿轮节曲线的建立
采用傅里叶级数来构造非圆齿轮的主动轮节曲线,由此构成的非圆齿轮副称为傅里叶非圆齿轮副[6]。为了所求的傅里叶非圆齿轮副的节曲线都能够封闭,主动轮节曲线的表达式为[7]:
(1)
傅里叶非圆齿轮的从动轮节曲线也必需是封闭的,当主动轮旋转1周,从动轮也要旋转1周,因此2个齿轮之间的转角必须满足条件[8—9]:
(2)
(3)
2.2 新型推糖机构的运动学分析
为了更加直观地表达新型推糖机构的末端运动轨迹并方便进行具体结构参数设计,文中进行了新型推糖机构的运动学分析。从图3可知,第2杆6的末端轨迹点是由两级傅里叶非圆齿轮副和两杆的相互运动而形成的。设两级傅里叶非圆齿轮节曲线是相同的,即非圆齿轮1和3的表达式是相同的。当给第1杆5增加数值大小相同且方向相反的转动速度时,可以将傅里叶非圆齿轮周转轮系看作一个固定在第1杆5上的定轴轮系,因此,各傅里叶非圆齿轮节曲线和转角关系为:
(4)
(5)
通过上述新型推糖机构的运动学分析,可以建立起傅里叶非圆齿轮参数与末端轨迹之间的数学关系,为后续机构具体参数设计提供理论基础。
3 新型推糖机构辅助设计软件
Matlab软件不仅具有强大的数据处理和计算能力,而且可采用GUI设计用户界面,常常被用于开发具体工程的辅助交互软件[13—15]。为了能够快速设计符合推糖工艺要求的具体结构参数,文中根据上述傅里叶非圆齿轮节曲线设计和新型推糖机构的运动学模型,结合Matlab的GUI界面设计方法,编写了如图4所示的新型推糖机构辅助设计软件。该软件通过输入傅里叶非圆齿轮的参数、第1杆5和第2杆6的初始角度,固定铰链点的坐标位置、第2杆6的长度等初始值,可进一步地计算非圆齿轮中心距并判别组成推糖机构的各非圆齿轮节曲线凹凸性,显示非圆齿轮传动比曲线、曲率大小等性能参数。该软件可根据所得机构参数,进行推糖机构的运动模拟,以验证工程设计的正确性。该软件的使用可高效地进行新型推糖机构机构设计,并快速得到机构参数。

图4 新型推糖机构辅助设计软件
4 机构设计与讨论
此节采用上述编写的辅助软件进行机构设计,以满足推糖机构的具体工艺要求。当选取参数为固定铰链点1为(20 mm, 10 mm),傅里叶非圆齿轮的参数为=25 mm,=0.5,=2.5,=0.9,=0.8时,可以计算得到中心距=50.33 mm。同时设=154°,=192°,第2杆杆长=140 mm,可以得到如图5所示的各非圆齿轮节曲线和末端运动轨迹(图5中两杆在初始角位置)。通过软件判别可知各组成推糖机构的非圆齿轮节曲线都是保凸的。图5中的轨迹具有一段较长的直线段,同时到最左段后推杆能快速地退出,且在退让阶段具有一个内凹的曲线,其中直线段的长度为136.8 mm,因此能够很好地满足推糖工艺要求。
相较于现有的凸轮五杆机构推糖机构,该机构结构紧凑且只需要一个动力源,无需采用复杂电机控制系统;同时该机构的齿轮机构相对于传统凸轮机构更易于提高工作效率,能够更好地满足糖果包装中的推糖工艺要求。

图5 傅里叶非圆齿轮系推糖机构结构与轨迹
此外,傅里叶非圆齿轮副具有很多的特殊运动规律,同理傅里叶非圆齿轮系推糖机构必然可以获得更多的末端运动轨迹。通过改变傅里叶级数系数,,,,,初始安装角,和第2杆6杆长等参数,可以获得不少特殊的末端轨迹形状,见图6。
从图6可以看出,给定不同的傅里叶非圆齿轮参数和初始角度可以得到D字和尖嘴等轨迹,为其他对轨迹有较高要求的包装机械提供一种新的参考方法。

图6 不同参数的推糖机构轨迹
5 结语
在分析糖果包装机推糖机构的工艺过程基础上,采用傅里叶非圆齿轮周转系机构实现推糖机构的工作轨迹,提出了一种新型糖果包装机推糖机构。
建立了新型推糖机构的机构运动数学模型,包括傅里叶非圆齿轮节曲线建立和新型推糖机构的运动学分析,并进一步采用Matlab语言编写了该机构的辅助设计软件。
通过辅助设计软件和推糖机构的具体工艺要求,选取合适的机构参数,设计了新型推糖机构并获得了相应工作轨迹。相较于传统的凸轮五杆机构,具有更好的结构紧凑性和工作效率。通过改变具体的参数可获得不同的末端轨迹,为其他包装机构设计提供了一个新的参考方法。
[1] 王成山, 何伟, 卢小敏. 全自动蝶式圆台扭结包装机研发[J]. 包装与食品机械, 2016, 34(1): 70-72.
WANG Cheng-shan, HE Wei, LU Xiao-min. Study on Full Automatic Butterfly Type Cone Twist Wrapping Machine[J]. Packaging and Food Machinery, 2016, 34(1): 70-72.
[2] 常勇, 杨富富, 李延平. 糖果包装机中凸轮连杆—组合机构的尺寸综合研究[J]. 中国机械工程, 2012, 23(17): 2023-2030.
CHANG Yong, YANG Fu-fu, LI Yan-ping. Research on Size Synthesis of Cam-Linkage Mechanism in a Candy Packaging Machine[J]. China Mechanical Engineering, 2012, 23(17): 2023-2030.
[3] 田野, 孙智慧, 郑赛男, 等. 包装机中推料机构分析及优化[J]. 包装工程, 2013, 34(21): 66-70.
TIAN Ye, SUN Zhi-hui, ZHENG Sai-nan, et al.Analysis and Optimization of Feeding Mechanism of Packaging Machine[J]. Packaging Engineering, 2013, 34(21): 66-70.
[4] 马骏, 王俊元, 杜文华, 等. 糖果包装机推糖机构运动分析[J]. 包装工程, 2014, 35(21): 1-5.
MA Jun, WANG Jun-yuan, DU Wen-hua, et al. Kinematic Analysis of Feeding Mechanism for Candy Packaging Machine[J]. Packaging Engineering, 2014, 35(21): 1-5.
[5] 马骏. 实现D形运动轨迹混合驱动平面五杆机构研究[D]. 太原: 中北大学, 2016: 8-20.
MA Jun. Study on the Hybrid Driven Mechanism of Flat Five Linkages to Achieve D-Shaped Trajectory[D]. Taiyuan: North University of China, 2016: 8-20.
[6] 徐高欢, 刘武, 谢荣盛. 变性高阶比傅里叶非圆齿轮驱动差速泵设计与试验[J]. 农业机械学报, 2019, 50(2): 384-392.
XU Gao-huan, LIU Wu, XIE Rong-sheng. Design and Experiment of Six-Blade Differential Pump Driven by Denatured Higher Order Ratio Fourier Non-Circular Gear Pairs[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(2): 384-392.
[7] 童林. 傅里叶非圆齿轮行星轮系打纬机构的设计与试验研究[D]. 杭州: 浙江理工大学, 2019: 8-32.
TONG Lin. Design and Test of Fourier Non-circular Planetary Gear Trains Beating-Up Machanism[D]. Hangzhou: Zhejiang Sci-Tech University, 2019: 8-32.
[8] 吴序堂, 王贵海. 非圆齿轮及非匀速比传动[M]. 北京: 机械工业出版社, 1997: 4-30.
WU Xu-tang, WANG Gui-hai. Non-Circular Gears and Non-uniform Velocity Rate Rotation[M]. Beijing: China Machine Press, 1997: 4-30.
[9] 王英, 陈建能, 赵雄, 等. 非圆齿轮行星轮系传动的栽植机构参数优化与试验[J]. 农业机械学报, 2015, 46(9): 85-93.
WANG Ying, CHEN Jian-neng, ZHAO Xiong, et al. Parameter Optimization and Experiment of Planting Mechanism Driven by Planetary Non-Circular Gears [J]. Transactions of The Chinese Society of Agricultural Machinery, 2015, 46(9): 85-93.
[10] 叶军, 陈建能, 赵雄, 等. 一种新型类偏心圆非圆齿轮设计及其应用[J]. 中国机械工程, 2018, 29(5): 565-571.
YE Jun, CHEN Jian-neng, ZHAO Xiong, et al. Design and Application of Generalized Eccentric Noncircular Gears[J]. China mechanical Engineering, 2018, 29(5): 565-571.
[11] 徐高欢, 陈建能, 张国凤. 傅里叶非圆齿轮驱动四叶片差速泵设计与特性分析[J]. 农业机械学报, 2014, 42(12): 80-87.
XU Gao-huan, CHEN Jian-neng, ZHANG Guo-feng. Design and Performance Analysis of Fourier Non-Circular Gear-Driven Differential Pump[J]. Transactions of The Chinese Society of Agricultural Machinery, 2014, 42(12): 80-87.
[12] 陈建能, 叶军, 赵华成, 等. 高阶变性偏心共轭非圆齿轮的凹凸性及根切判别[J]. 中国机械工程, 2014, 25(22): 3028-3033.
CHEN Jian-neng, YE Jun, ZHAO Hua-cheng, et al. Concavity and Tooth Undercutting of High-Order Deformed Eccentric Conjugate Non-Circular Gears[J]. China mechanical Engineering, 2014, 25(22): 3028- 3033.
[13] 谢丽蓉. 基于Matlab/GUI异步电动机人机界面设计[J]. 实验技术与管理, 2014, 31(8): 50-53.
Xie Li-rong. Design of Human-Machine Interface Based on Matlab/GUI for Asynchronous Motors[J]. Experimental Technology and Management, 2014, 31(8): 50-53.
[14] 张建斌, 赵静, 许晓晴. 基于Matlab-GUI的数值积分界面设计[J]. 实验室研究与探索, 2017, 36(1): 127-131.
ZHANG Jian-bin, ZHAO Jing, XU Xiao-qing. The Numberical Integration Design Based on Matlab-GUI[J]. Experimental Technology and Management, 2017, 36(1): 127-131.
[15] 代昌浩, 黄乐, 陆云江, 等.基于 MATLAB GUI油封弹簧径向力计算[J]. 机床与液压, 2020, 48(21): 150-154.
DAI Chan-ghao, HUANG Le, LU Yun-jiang, et al.Radial Force Calculation of Oil Seal Spring Based on MATLAB GUI[J]. Machine Tool & Hydraulics, 2020, 48(21): 150-154.
Design of a New Feeding Mechanism for Candy Packaging Machine
YE Jun, XUE Ming-rui, SHEN Shan-shan, LIU Chang-sheng, YE Zhi-chao
(School of Mechanical and Electrical Engineering, Zhejiang Industry Polytechnic College, Shaoxing 312000, China)
The work aims to design a new feeding mechanism for candy packaging machine to better meet the technological requirements of candy packaging. The working trajectory of feeding mechanism of candy packaging machine was realized by Fourier non-circular gear train,and the mathematical model of Fourier non-circular gear train was established.According to the specific technological requirements on feeding of candy packaging machine, the auxiliary program of mechanism design was compiled by Matlab language, and the mechanism parameters that meet the requirements were selected through the program. Through the example calculation, it can be seen that the Fourier non-circular gear train can realize the working trajectory, and has a straight feeding travel length of 136.8 mm. The push rod can exit rapidly at the left most of the travel.The Fourier non-circular gear train can well realize the working trajectory of feeding mechanism and fulfill the technological requirements of candy packaging.
feeding mechanism; Fourier non-circular gears; Matlab; working trajectory
TB486
A
1001-3563(2022)01-0266-06
10.19554/j.cnki.1001-3563.2022.01.034
2021-02-04
浙江省自然科学基金(LQ20E050003);绍兴市公益性项目(2017B70076);
叶军(1989—),博士,浙江工业职业技术学院讲师,主要研究方向为机械机构创新设计。
猜你喜欢
包装工程(2022年13期)2022-07-27
包装工程(2022年11期)2022-06-20
农业工程学报(2022年4期)2022-04-24
少儿科学周刊·儿童版(2020年9期)2020-11-25
少儿科学周刊·少年版(2020年9期)2020-03-04
少儿科学周刊·少年版(2020年9期)2020-03-04
疯狂英语·读写版(2019年5期)2019-09-10
科技视界(2018年21期)2018-12-10
大陆桥视野·下(2018年2期)2018-03-03
文艺生活·中旬刊(2017年4期)2017-05-25
