小波卡尔曼滤波方法在正压通气波形实时预测中的研究*
2022-01-26 03:56周婷车波邓林红
生物医学工程研究 2021年4期
周婷,车波,邓林红△
(1.常州大学生物医学工程与健康科学研究院,常州 213164;2.常州大学计算机与人工智能学院,常州 213164)
1 引 言
正压通气治疗机作为治疗OSA、哮喘和慢性阻塞性肺病等疾病的重要工具,目前已经广泛应用于呼吸衰竭、呼吸支持治疗等临床场合[1-4]。为了提高通气中呼吸异常预警的实时性和通气控制的顺应性[5-8],对呼吸信号的实时预测具有重要的临床价值。目前常用的信号预测方法包括Kalman滤波[9-10]、Bayes以及SVM、Random Forest、Adamboost、LSTM等机器学习方法[11-15]。其中,机器学习方法仅重视各种生理信号的干扰,但忽略了提取信号中的量测干扰,如仪器的信号采集、传输中的串扰等,并且算法实时性和可移植性的问题还未很好地解决。
Kalman滤波作为一种最优状态估计方法,可以很好地应用于有系统噪声和量测噪声的动态系统。此外,基于Kalman滤波的扩展算法也已经在诸多生物医学问题上取得较好的应用[16-20],如刘颂阳等[21]利用扩展Kalman滤波方法在近红外光谱提取脑血流信号中实现了较低误差的滤波和估计;Bukhari等[22]提出了一种结合扩展Kalman滤波器和高斯过程回归的预测方法,减小了放疗过程中呼吸运动的预测误差;Shahtalebi等[23]提出小波分解结合自适应Kalman滤波技术,提高了病理性手震颤的预测精度。但是,Kalman滤波及扩展方法在提取信号的同时最优估计和高分辨率处理等问题上仍有不足,如在移动端处理中要求的实时性、算法可移植性。
鉴于此,本研究结合小波算法的多分辨率分解技术[24-26]和Kalman滤波器组的同时最优估计,设计了基于小波卡尔曼滤波的呼吸压力、流量信号实时预测方案,对比分析了该方案与常用预测方法的优势,最后总结了小波卡尔滤波方法在未来呼吸信号反馈控制及异常预警方面的重要意义。
2 实验方法
2.1 呼吸信号采集及预处理
本研究使用的正压通气装置为BreathCare YH820鱼跃双水平正压通气治疗机,数据采集系统为实验室搭建的呼吸压力、流量信号硬件采集端和上位机软件显示端,见图1(a)。实验数据采集对象为实验室五位志愿者,其信息统计见表1。数据采集操作和记录的规范,主要参照欧洲呼吸学会ERS推荐标准。由于呼吸信号的频段集中分布在低频,因此,在数据采集后对其做初步的低通滤波预处理,见图1(b),滤掉其中高频随机噪声和工频干扰。
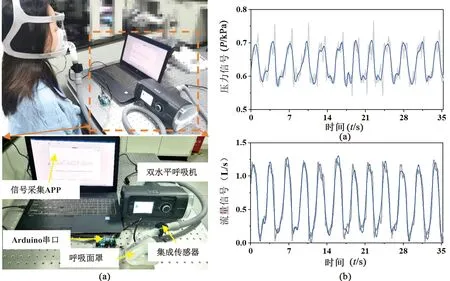
图1 数据采集及滤波预处理。
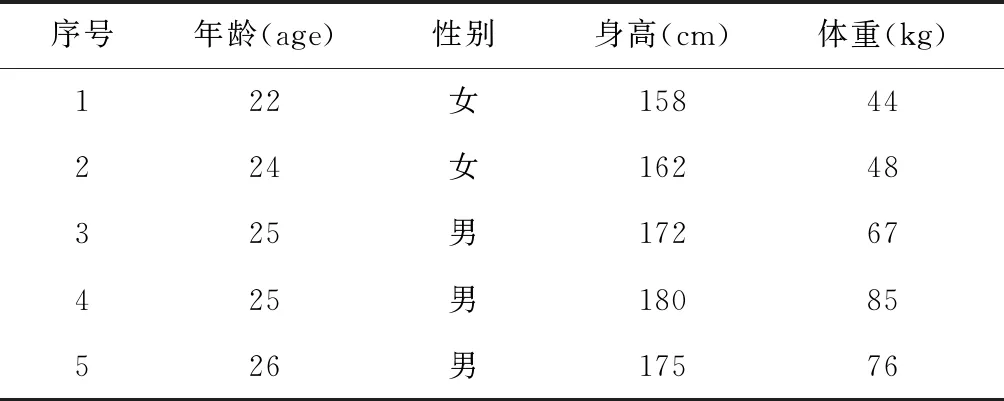
表1 实验数据采集对象
2.2 小波卡尔曼滤波的预测方法
由于正压通气过程中,采集到的呼吸信号{xk+1}存在系统噪声{ξk}和观测噪声{ηk},并且两者在统计学意义上相关,故考虑一个线性随机系统的模型:
(1)
式中,Ak、Ck和Γk均为已知的常值矩阵,初始条件为x0。
该模型的卡尔曼滤波过程为:
(2)
式中,
其中,Mk-1、Nk-1和Hk-1是已知的常值矩阵,Rk、Qk是已知的非负定矩阵和正定矩阵。
为提高卡尔曼滤波的分辨率,本研究借助小波算法的多分辨率分解技术,再结合Kalman滤波器组的同时最优估计方法,实现了小波卡尔曼滤波的信号预测,见图2。
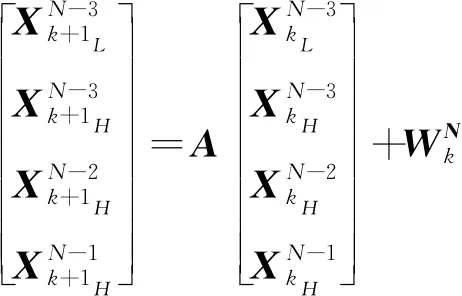
为满足实时应用的需求,减少小波分解过程占用的时间,需要对信号做多层的同时分解,本研究通过倍频滤波器组来实现三层同时分解。若观测到的呼吸信号离散形式为{x(N,k)},则各分解量为:
(4)
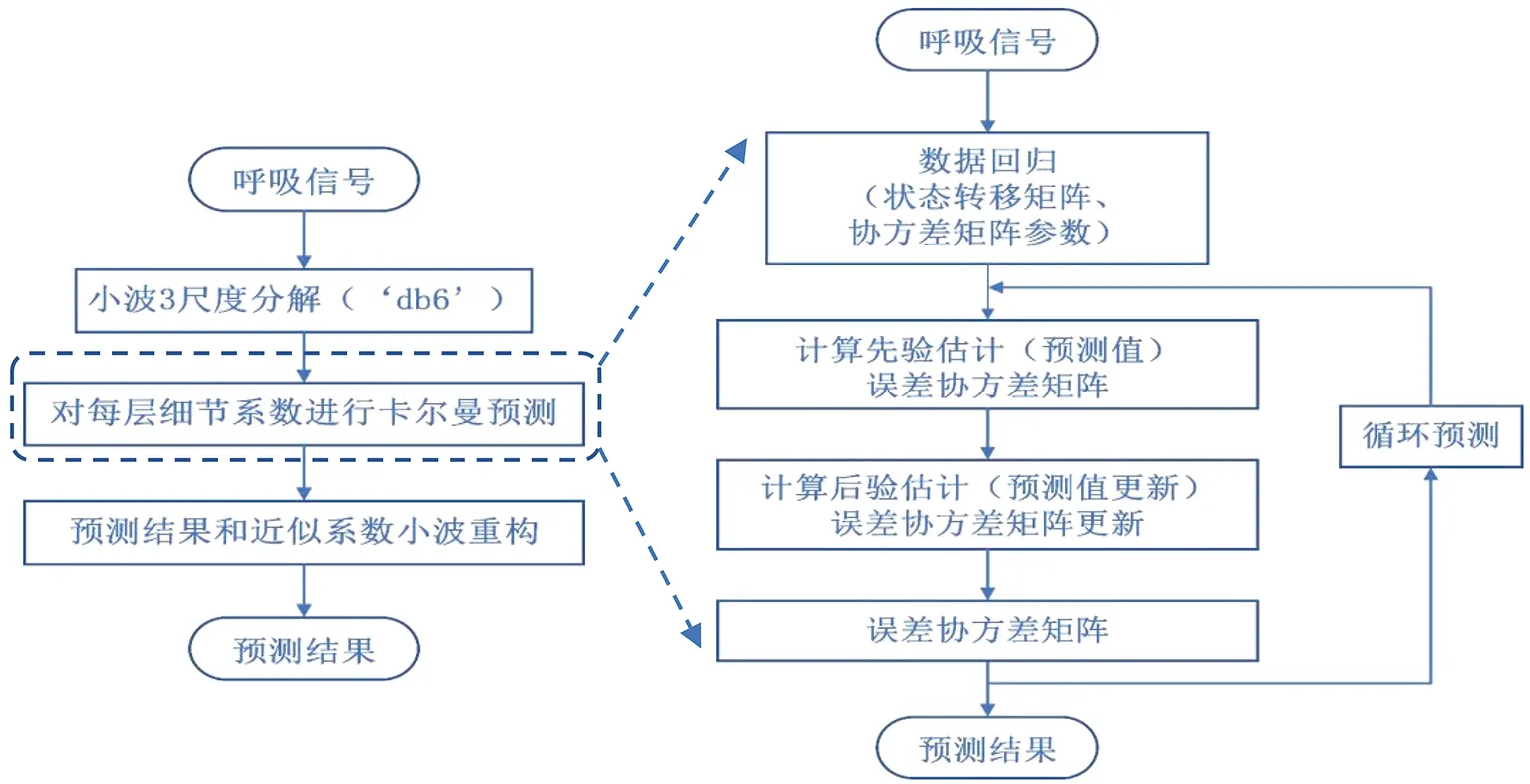
图2 小波卡尔曼滤波的信号预测流程
(5)
相应地,其量测方程为:
(6)

(7)

3 结果与讨论
本研究仿真实验环境为Windows10 64bit,MATLAB R2018b。实验所用数据为一位受试者呼吸的压力、流量信号,对比六种常见预测方法(LSTM、Adaboost、RF、SVM、Bayes和Kalman)在正常呼吸状态下压力、流量信号的预测效果,见图3(a)。其中,数据集的前80%作为训练集,其余的 20%作为测试集,在使用数据前先做标准化处理,防止训练过程发散。由图3(a)的压力、流量波形的直观结果可知,几种常用方法的预测波形与观测波形较为吻合,误差较小。进一步地,对多个周期的呼吸压力、流量信号预测结果作统计小提琴图分析,见图3(b):呼吸压力信号的均方根误差整体比流量信号的误差小,其中,Kalman滤波方法对呼吸压力、流量信号的预测误差波动相对较大,但误差均值均低于0.02。
此外,尽管Kalman滤波方法在预测的准确性方面要比其他方法低,但在实时性方面比其他方法优异,见表2。其中,仅在预测时间上比较,Kalman滤波方法和SVM方法的实时性相对较好,两者耗时均低于0.01 s,比其他方法的耗时少了一个数量级以上。考虑到呼吸信号预测实际用于正压通气的控制或异常判断中,要求算法的实时性高、结构简单。因此,后续将在Kalman滤波方法实时性的基础上,进一步提高准确性来满足实际的应用需求。
为进一步提升Kalman滤波方法的准确性,本研究小波卡尔曼滤波的预测方案,实现了对呼吸压力、流量信号的三层分解和最优估计,见图4。选取一段咳嗽状态下的呼吸压力、流量信号,小波卡尔曼滤波的预测结果(图4(a)实线)比普通Kalman滤波的结果(图4(a)虚线)更加贴合观测信号(图4(a)圆点),其预测波形的均方根误差小于0.05。
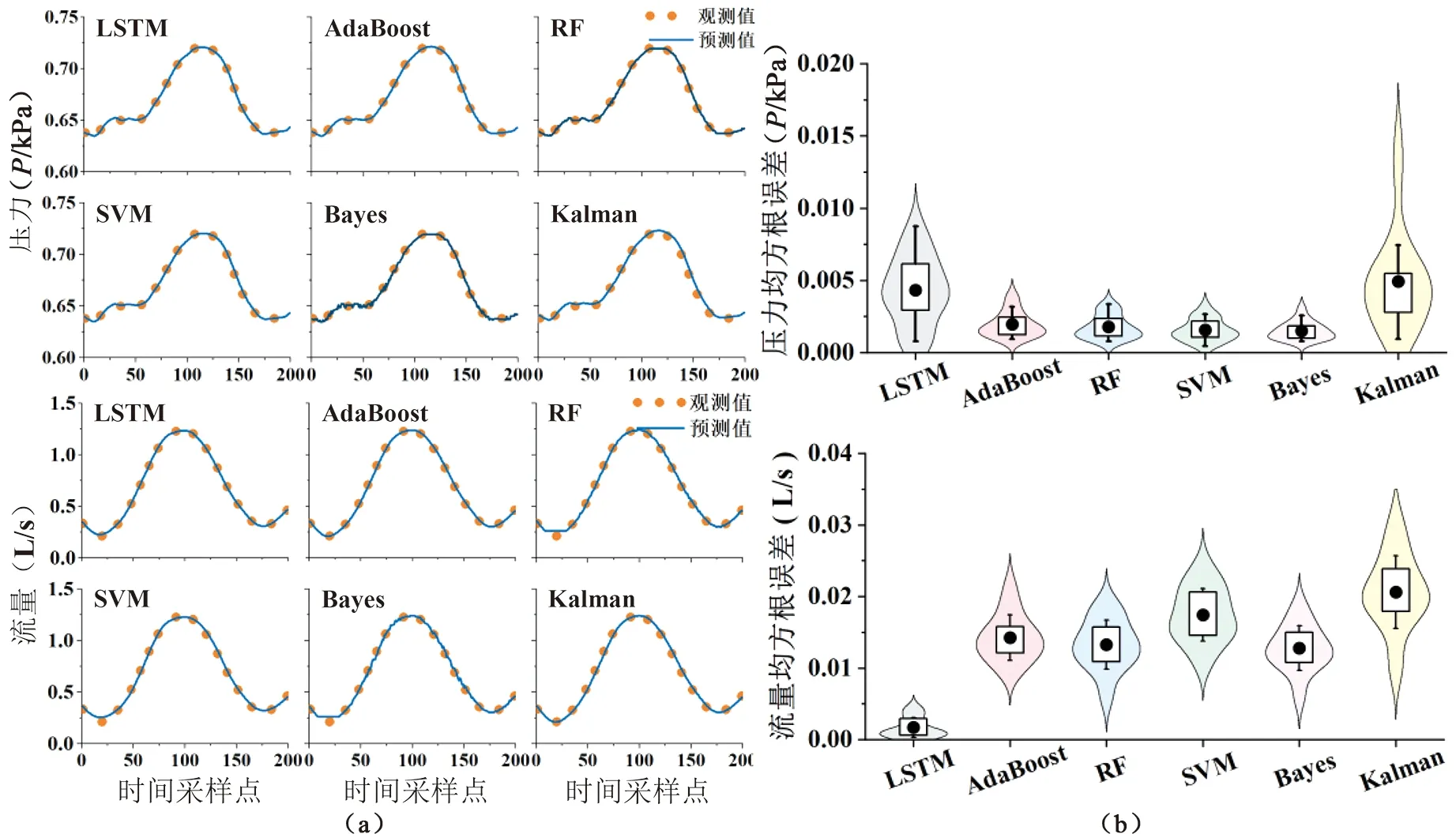
图3 正常呼吸状态下常用预测方法的结果对比

表2 常用方法的训练和预测时间
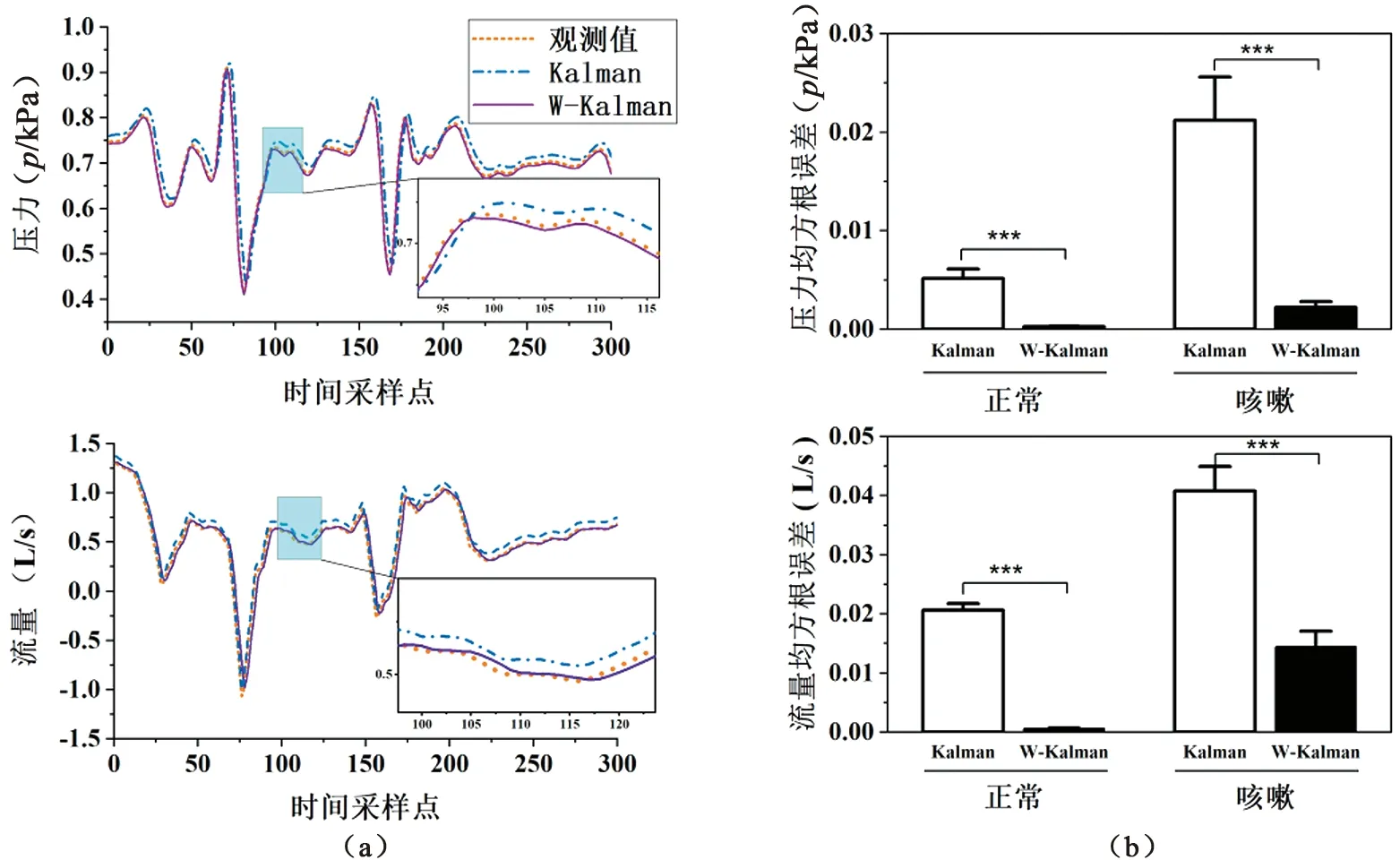
图4 小波卡尔曼滤波的预测结果及误差统计
对比这两种方法对呼吸压力、流量信号预测的均方根误差的统计差异,见图4(b)。结果表明,对于正常和咳嗽信号,小波卡尔曼滤波方法的效果要显著优于普通Kalman滤波。由此可以推测,在允许分解层数增加又保证分解实时性的情况下,这两种方法预测结果的统计学差异将会更加显著。
4 总结
本研究为了提高正压通气中呼吸信号预测的实时性和准确性,结合小波算法的多分辨分解技术和Kalman滤波器组的同时最优估计,设计了小波卡尔曼滤波的呼吸信号预测方案。与常见预测方法的结果对比表明,该方案保证了算法的实时性,提升了信号预测结果的准确性,且算法结构简单,易于移植到移动处理终端。因此,可以推断,在允许增加小波算法分解层数和Kalman多步预测的条件下,小波卡尔曼方法将会很好地用于呼吸信号的实时预测,进而更好地应用于正压通气的反馈控制和呼吸异常预警,进一步提升正压通气技术的自动化水平。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
电子制作(2019年23期)2019-02-23
电子制作(2018年16期)2018-09-26
北京航空航天大学学报(2017年9期)2017-12-18
中国惯性技术学报(2017年1期)2017-06-09
北京航空航天大学学报(2017年12期)2017-04-23
电子技术与软件工程(2016年22期)2016-12-26
电脑知识与技术(2016年24期)2016-11-14
火控雷达技术(2016年3期)2016-02-06
海军航空大学学报(2015年1期)2015-11-11