
钝锥动态转捩风洞试验
2022-02-06 03:14张石玉赵俊波付增良周平周家检梁彬
实验流体力学 2022年6期
张石玉,赵俊波,付增良,周平,周家检,梁彬
中国航天空气动力技术研究院,北京 100074
引 言
边界层转捩是边界层内流动由层流状态发展为湍流状态的过程,是一种复杂的流动物理现象。边界层转捩受多种因素耦合作用,会对流动状态、气动力、力矩以及传热特性等方面产生影响。
在钝锥再入飞行器的飞行雷诺数范围内通常会发生边界层转捩。研究表明,边界层转捩与钝锥的气动稳定性密切相关[1-12]。早期的钝锥飞行器飞行试验在边界层转捩阶段会发生俯仰运动失稳现象[3-5,8]。在宋威、赵小见等[13]的钝锥模型风洞自由飞试验中也出现了这一现象。该现象将增大飞行不确定性,影响落点精度。
从20世纪70年代到21世纪,各国学者都针对高超声速转捩问题开展了大量研究,其中的代表性人物有 Ericssion[3]、Martellucci[14]和楼洪钿[15-16]等,研究重点集中于转捩对尖锥、钝锥飞行器的俯仰静稳定性和配平迎角的影响。部分学者也开展了转捩对动稳定性的影响研究,研究结果表明:在小迎角飞行时,钝锥飞行器将出现上下表面非对称的转捩,当转捩发生在飞行器后段时,将导致飞行器静稳定性降低、动稳定性增大;当转捩向前发展并超过质心后,产生的气动作用相反,将导致静稳定性增大、动稳定性降低,且气动静、动稳定性呈现反向变化现象。10°尖锥气动静、动稳定性导数随雷诺数(Re)变化的研究结果如图1[15]所示(图中,Cm,θ为气动静稳定性导数,Cm,θ˙为气动动稳定性导数,α为迎角,Ma为马赫数,为相对模型长度的无量纲转心位置,ω为模型的振动频率)。
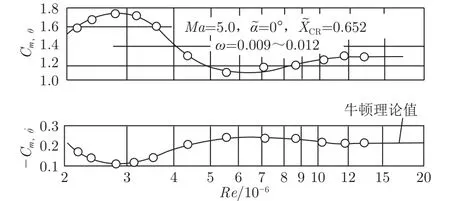
图1 尖锥静、动稳定性导数随雷诺数变化[15]Fig.1 Variation of aerodynamic stability derivatives of sharp cone with Re[15]
上述研究结果表明,飞行器再入过程的气动稳定性随雷诺数变化显著,但静、动稳定性均未改变。静、动稳定性变化后的飞行动力学仿真不能复现俯仰运动失稳现象,其根源在于上述研究的前提是假设飞行器气动特性符合线性规律、非定常特性可忽略,进而通过线性化后的静、动稳定性导数间接研究边界层转捩对飞行器运动的影响。然而在实际飞行过程中,由于飞行器高度、速度的快速变化,边界层转捩区由后往前快速推进,此时边界层黏性流动滞后将产生显著的非定常气动作用。与此同时,非定常的动态转捩过程与飞行器运动相互耦合,使得实际飞行状态更加复杂。在常规动导数试验中,由于模型转捩区变化较小、系统机械阻尼较高等原因,试验结果很难反映动态转捩的气动作用。
基于上述原因,本文建立了钝锥飞行器动态转捩风洞试验技术。该技术在模型自由振动过程中测量边界层转捩的动态变化过程,可为边界层动态转捩与飞行器运动的耦合效应研究提供试验手段。
1 试验系统
试验采用单自由度的气浮轴承支撑机构,气浮轴承转轴与模型俯仰轴重合,模型可绕俯仰轴自由转动,通过旋转编码器实时测量迎角历程。在风洞侧窗外安装红外热像仪,测量试验模型运动过程中的边界层转捩动态变化过程。迎角数据和转捩信息同步采集,可实现非对称转捩动态效应的定性和定量综合研究。试验系统如图2所示,试验设备功能如图3所示。
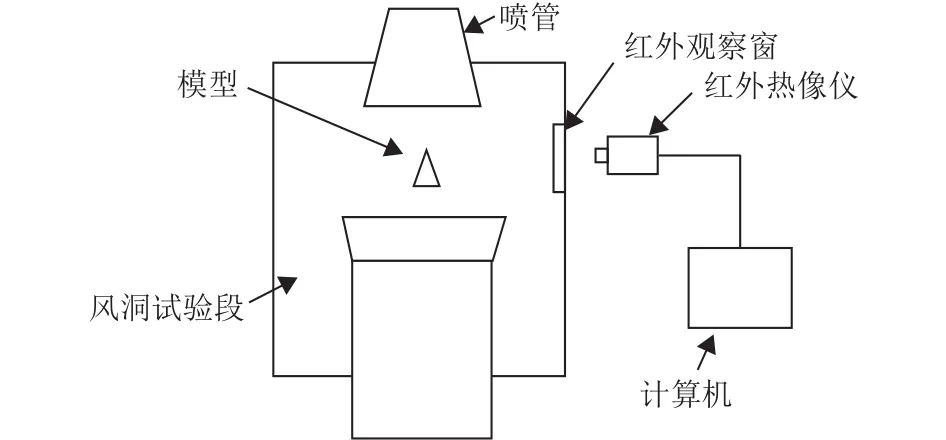
图2 试验系统示意图Fig.2 Sketch of test system
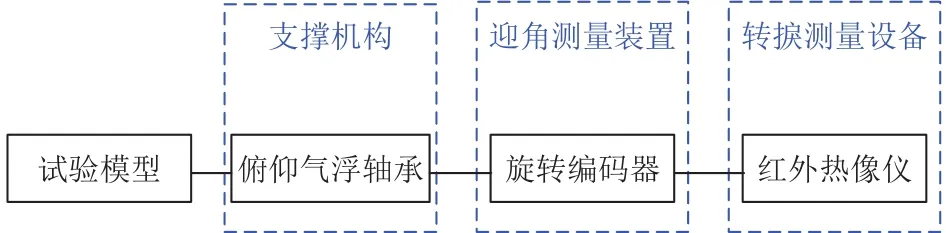
图3 试验设备功能图Fig.3 Capabilities of facilities in test system
试验系统由模型、轴承系统、模型限位装置、支杆和气缸组成,如图4所示。模型限位装置由气缸驱动,用于风洞启停前模型的限位,以减小风洞启停时的气流冲击对模型及试验设备的影响。
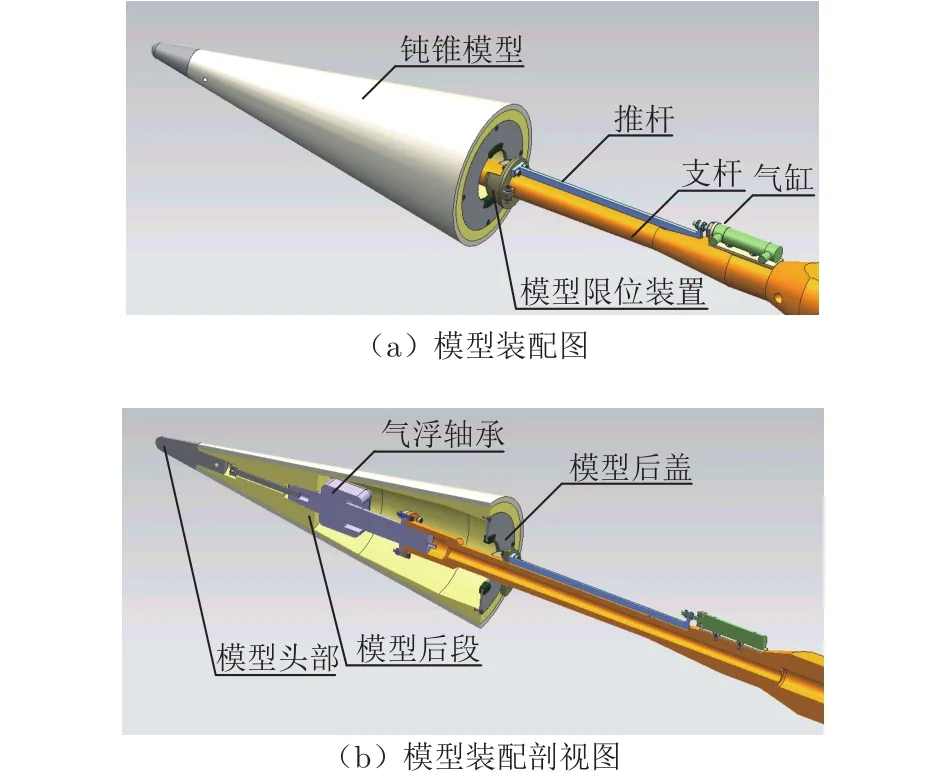
图4 模型装配示意图Fig.4 Assembly drawing of blunt cone model
1.1 试验模型及风洞
模型采用GJB 4399—2002《高超声速风洞气动力试验方法》中的HSCM-3钝锥标模,半锥角为9°,模型长度L=421 mm,底部直径Db=148.3 mm,头部半径Rn=8.75 mm,钝度比为Rn/Rb=0.118(Rb为底部半径),长细比L/Db=2.839。模型采用聚醚醚酮(PEEK)高分子材料制作,该材料具有加工性好、硬度高、导热率低、发射率高等优点,有利于加工成型和红外温度测量。
试验在中国航天空气动力技术研究院第二研究所的FD-07风洞开展。FD-07是一座暂冲、吹引式高超声速风洞,以空气为工作介质。带密闭室的自由射流试验段尺寸为1 880 mm×1 400 mm×1 130 mm。喷管出口直径为500 mm,马赫数为4.0、4.5、5.0、6.0、7.0和8.0,采用更换喷管的方法改变马赫数。马赫数6.0以上的喷管都带有水冷却装置,防止喷管结构受热导致喉道产生变形。配备快速插入式四自由度机构,迎角变化范围—10°~50°。试验段侧壁开有通光口径为520 mm×320 mm的光学玻璃窗口,供红外热像仪、纹影仪等光学设备观察和拍摄使用。
1.2 支撑机构
钝锥模型边界层动态转捩产生的气动作用较小,要求轴承支撑机构运动摩擦力尽可能小,避免动态转捩气动作用被摩擦力矩掩盖。本文采用高精度低阻尼的单自由度气浮轴承作为支撑机构,其运动阻尼低至1.0×10—3N·m,可有效降低机构运动阻尼对试验结果的影响。
气浮轴承如图5所示。单自由度气浮轴承机构采用浅腔柱形孔二次节流静压气体轴承,通过非对称设计以提高轴承径向的承载能力。当供气压力为0.8 MPa 时可提供300 N的径向承载力。
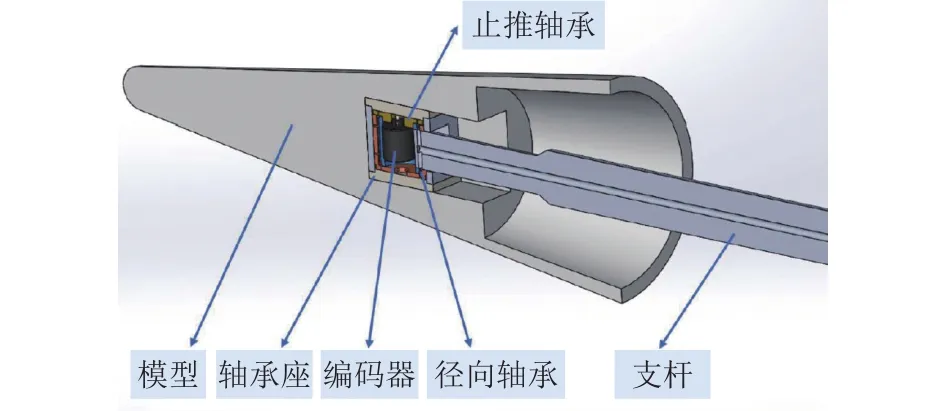
图5 气浮轴承示意图Fig.5 Sketch of gas bearing
1.3 红外热像仪
采用转捩红外测量技术测量模型整体转捩信息。转捩红外测量技术基本原理是利用红外热像仪测量模型表面的温度分布与变化过程,并通过传热解算获得热流分布,综合模型表面热流分布和温度分布判断边界层转捩的位置与形态。与传统的热流传感器、温敏漆等转捩测量技术相比,转捩红外测量技术具有安装简单、操作方便、实时测量、大面域整体测量等优点,适合动态转捩风洞试验。
试验采用InfraTec公司生产的ImageIR®8325红外热成像系统(制冷型红外热像仪),光谱范围为3.7~4.8 µm,热灵敏度<25 mK,测温精度为±1.0 K,图像为640像素×512像素,采样率为100 Hz。红外观察窗为镀有消反射膜和红外增透膜的硅玻璃,其在中波段具有较好的透过性能。
2 试验结果
2.1 迎角振荡现象
在马赫数6.0条件下,开展动态转捩和层流动态对比试验,试验参数如表1所示。其中,1#和2#为动态转捩试验,3#为层流动态试验。
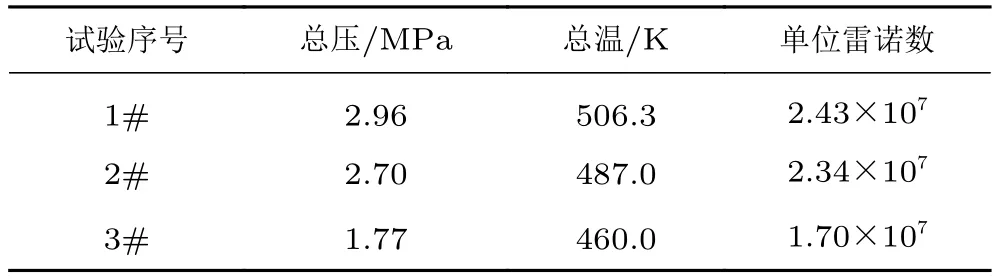
表1 试验参数表Table 1 Inflow parameters of wind tunnel tests
试验中,模型从2°迎角释放,为模型提供初始扰动,激发动态转捩气动力作用。之后模型在气动作用下绕俯仰轴自由转动。动态转捩试验模型释放初期表面温度如图6所示,温度显示范围为30~70 ℃。由于释放初始迎角为2°,模型表面边界层发生了显著的非对称转捩,背风面转捩位置靠前。
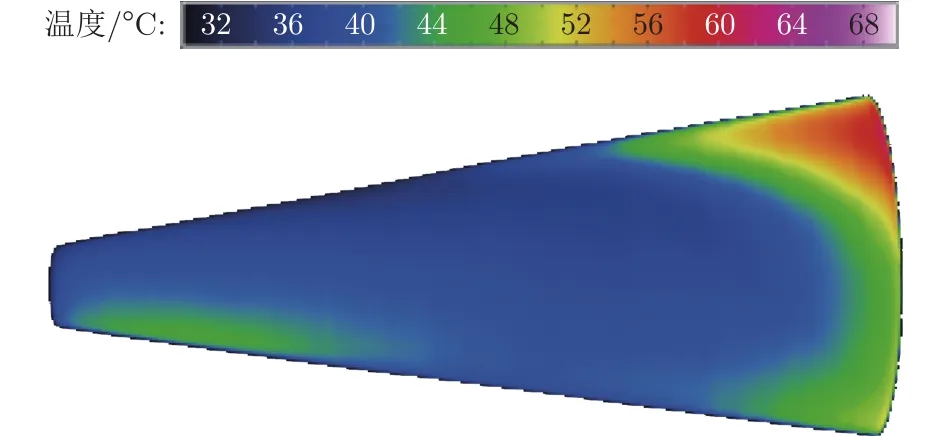
图6 钝锥标模转捩试验模型表面温度图(1#试验)Fig.6 Temperature graphic of boundary layer transition wind tunnel test (1# test)
动态转捩和层流动态试验的迎角随时间t的变化如图7所示。可以看到,虽然在迎角大振幅段1#、2#转捩试验存在振动过程差异,但在18 s之后均出现了显著的迎角振荡现象,最大振幅约0.6°。与之相比,3#层流动态试验在迎角振荡收敛后振幅很小,15 s后振幅小于0.2°。由此可知,随迎角振荡的边界层动态转捩过程导致了1#、2#试验迎角振荡现象。该过程会影响模型的动态稳定性,导致模型迎角小幅振荡失稳。
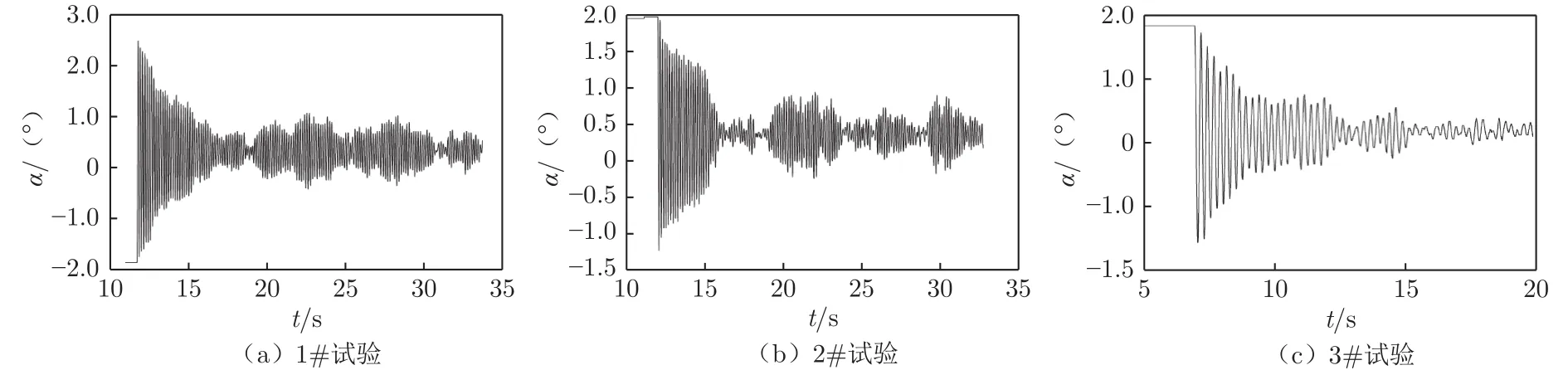
图7 动态转捩试验、层流动态试验迎角曲线Fig.7 Curves of angle of attack in wind tunnel tests
2.2 转捩区前后移动相对于俯仰角运动滞后
早期研究表明:在小迎角条件下,随迎角增大,小钝锥模型背风面转捩区前推;迎角减小,背风面转捩区后退。在本文动态转捩试验中,通过同步测量红外温度和迎角,直接测量到了边界层转捩区前后移动相对于俯仰角运动的滞后现象。
本文通过对比转捩区前后移动的转换时刻点与模型迎角上行和下行的峰值时刻点来判断转捩区前后移动相对于俯仰角运动的滞后时间。判断滞后时间的具体方式为:先判断模型俯仰角运动的迎角峰值/谷值时刻,此步骤可通过迎角测量曲线直接获得;然后判断转捩区前后移动的转换时刻,此时将背风面转捩线前推至最前且开始向后退缩的前一时刻作为转捩峰值时刻,将转捩线在最后位置且开始向前发展的前一时刻作为转捩谷值时刻。上述两时刻分别与模型上一个迎角峰值/谷值时刻的差即为迎角下行/上行过程的转捩滞后时间。
在上述分析过程中,由于红外温度图色彩过渡平滑,直接采用红外温度图分析误差较大。本文运用Canny边缘检测图像处理技术,将红外温度图处理成更为清晰的线图进行转捩位置判断。Canny边缘检测技术是一种提取图像高灰度梯度线的方法,该方法运用高斯滤波进行图像降噪,计算图像灰度梯度,过滤非最大值边缘点,消除滤波误差,从而提取出高灰度梯度的边缘线。经过Canny边缘检测处理后的边界层转捩线及转捩带清晰可见(图8),分析转捩线图可获得转捩区前进时刻和后退时刻:在t=14.39 s时,模型俯仰角运动到峰值时刻,此时转捩区后沿还在向前移动;t=14.42 s时,转捩区后沿在下一时刻开始后退。因此在这一周期内,转捩区移动相对于模型俯仰角运动的滞后时间Δt=0.03 s。
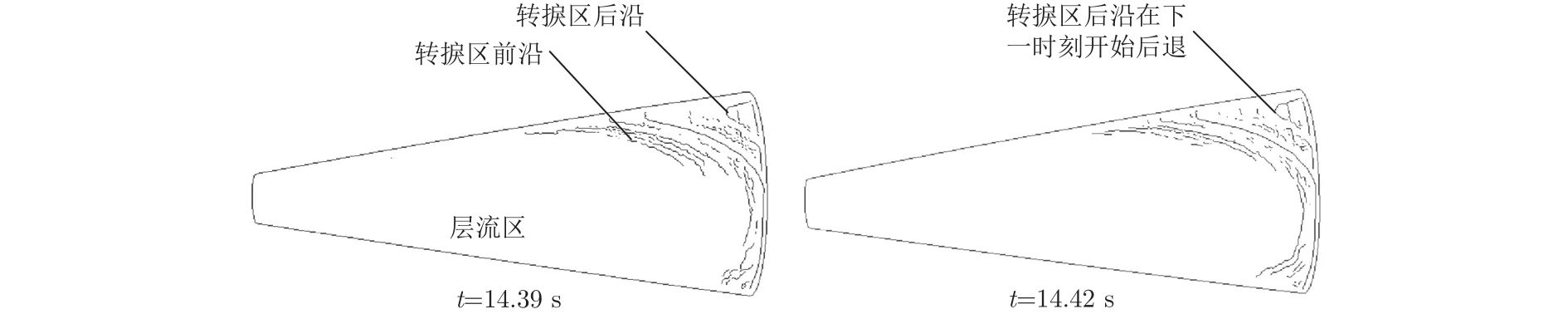
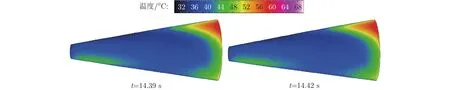
图8 模型表面温度图及其Canny边缘线图(1#试验)Fig.8 Temperature graphics and correlated transition-lines solved with Canny edge detector method (1# test)
采用上述转捩滞后时间分析方法,分析14.31~15.17 s转捩显著的迎角大振幅段,获得转捩滞后时间如表2所示。表中,Δt1和Δt2分别为迎角下行和上行时的转捩滞后时间。两滞后时间曲线如图9所示,滞后时间集中在0.03~0.04 s之间。转捩运动相对于迎角运动的相位差(Δφ)如图10所示。由图可知,相位差主要集中在70°~90°之间,近似为俯仰角运动的1/4个周期。需要说明的是,考虑到本试验红外热像仪的测量时间间隔为0.01 s,峰值点的判断也可能存在人为偏差(根据经验,该偏差不超过1/2个测量时间间隔),同时考虑到模型表面的传热延迟,本文动态转捩滞后时间的测量误差约≤0.01 s。
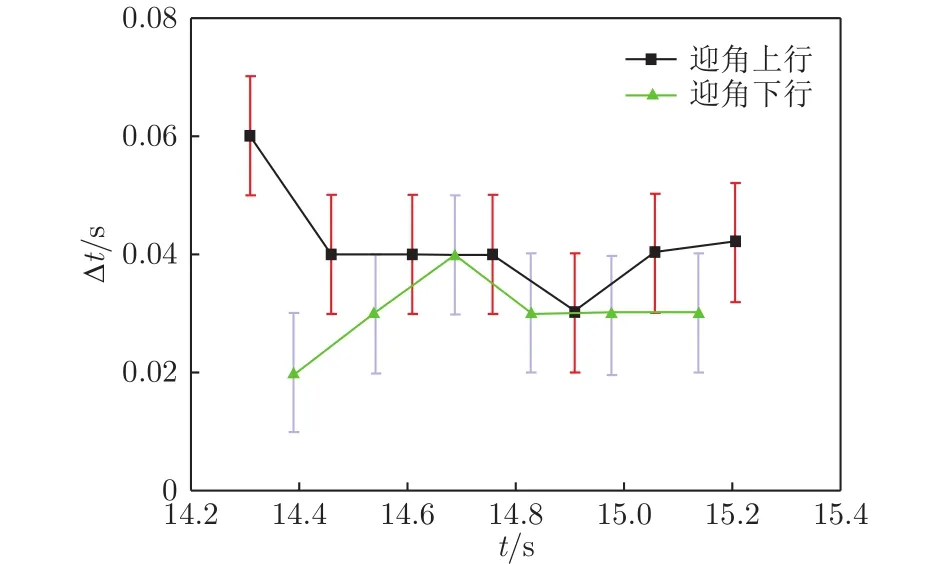
图9 转捩运动相对于迎角运动的滞后时间Fig.9 Time delay of transition area movement compared to angle of attack oscillation
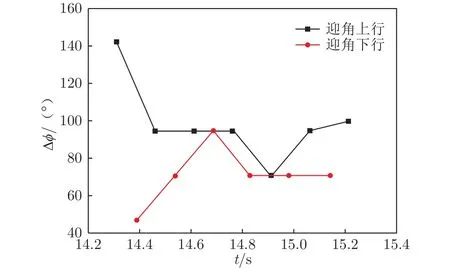
图10 转捩运动相对于迎角运动的相位差Fig.10 Phase difference of area movement compared to angle of attack oscillation
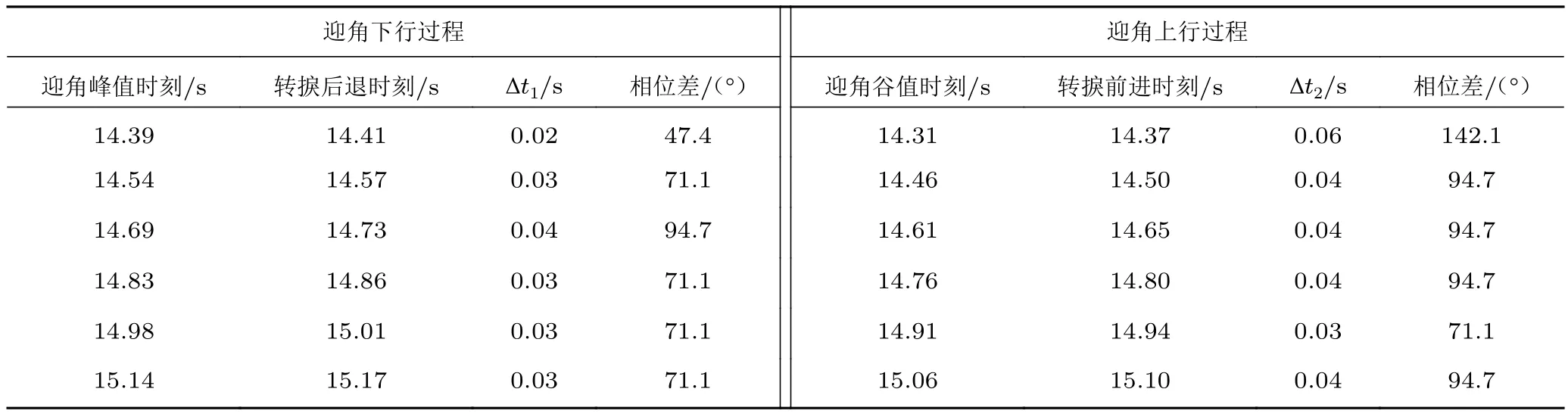
表2 转捩滞后时间分析结果Table 2 Delay time of transition area movement compared to angle of attack oscillation
3 结 论
本文综合气浮轴承动态试验技术和转捩红外测量技术,建立了钝锥飞行器动态转捩风洞试验技术。初步开展了9°半锥角钝锥标模动态转捩试验,试验中测量到动态转捩过程中非定常气动效应导致的迎角振荡现象,获得迎角振荡过程中转捩区前后移动相对于俯仰角运动的滞后时间约为0.03~0.04 s,近似为俯仰角运动的1/4个周期。
该试验技术可为动态转捩的理论研究及工程应用提供试验研究手段,同时也可为动态转捩数值计算方法研究提供试验验证方法。试验结果表明动态转捩与俯仰运动的耦合作用可能导致钝锥飞行器俯仰稳定性降低,该结论可为钝锥飞行器转捩阶段的飞行稳定性研究提供新方向。
本文开展的动态转捩风洞试验,相关技术仍需改进。试验采用红外热像仪测量转捩,其原理是通过测量模型表面温度并解算热流从而间接判定转捩位置。转捩区前后移动在某一区域产生热流变化再转化成温度变化,这一过程存在一定延迟,可能影响动态转捩滞后时间的辨识精度。下一步拟采用脉动压力传感器等高频响低延迟的转捩测量技术,提升动态转捩滞后时间的测量精度,进一步研究和验证相关试验现象及结果。
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
凤凰动漫(军事大王)(2022年1期)2022-04-19
北京航空航天大学学报(2021年6期)2021-07-20
数学物理学报(2021年1期)2021-03-29
航空发动机(2020年3期)2020-07-24
空间科学学报(2020年4期)2020-04-22
电子制作(2018年2期)2018-04-18
小朋友·快乐手工(2015年5期)2015-06-06
科技传播(2014年4期)2014-12-02
