基于STM32 的立方体卫星姿控计算机设计
2022-02-13 10:00谈曾巧陆正亮
现代电子技术 2022年2期
谈曾巧,陆正亮,张 翔
(南京理工大学 机械工程学院,江苏 南京 210094)
0 引言
立方体卫星(CubeSat)始于1999 年美国加州理工大学和斯坦福大学的一项科学研究,斯坦福大学学者提出了立方星的概念,并规定了一单元立方体卫星的质量为1 kg,结构尺寸为100 mm×100 mm×100 mm,使得立方体卫星成为纳卫星的通用标准,如图1 所示。随着机械、电子等行业向着微型化、集成化方向发展以及空间任务的多样化,立方体卫星以其研制成本低、研制周期短、功能密度高、部署灵活等特点,逐渐成为国内外航天领域的研究热点。
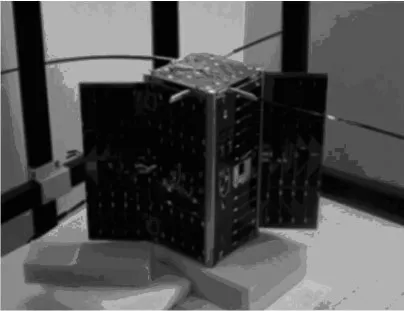
图1 南理工1 号(2 单元立方体卫星)
随着空间技术的逐渐成熟,立方体卫星可以实现大范围轨道机动、编队控制、交汇抵近、太空抓捕等复杂技术操作,使其广泛应用通信(如图2 所示)、遥感(如图3所示)、环境监测、科学试验和空间攻防等空间任务中,而这些技术的实现都对卫星姿态控制提出越来越高的要求。姿控计算机是姿态确定与控制系统(ADCS)中的控制中心,需要完成传感器数据采集、数据处理、姿态确定、姿态控制等多个任务。目前,应用在大卫星上的姿控计算机发展较为成熟,但在小型化的过程中存在着计算能力、控制能力与功耗、成本相互冲突等问题。因而,如何设计一个低成本、低功耗、高性能的姿控计算机成为一个亟需解决的问题。
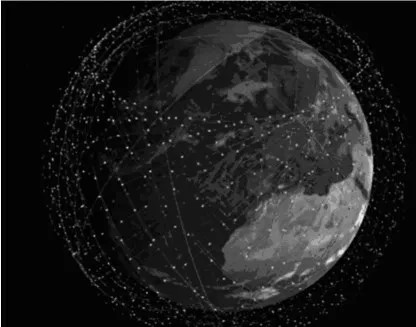
图2 SPACE⁃X 通信星座
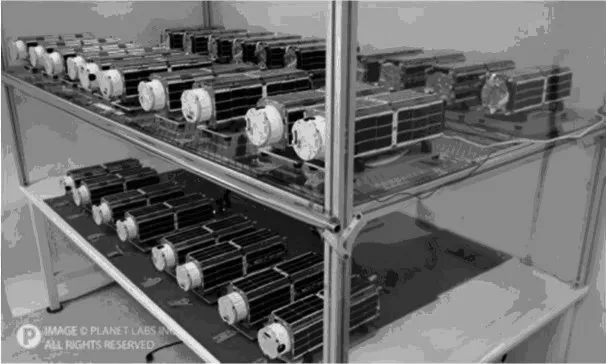
图3 鸽群卫星遥感星座
目前,国内的姿控计算机有采用386、DSP、FPGA等芯片进行设计的:386 CPU 的运算速度较低,而且结构和功耗均不理想;DSP 虽然运算速度快,但是存在耦合松散、硬件调试周期长等问题;FPGA 虽然设计灵活,但由于没有指令系统,所以其控制能力比较弱。相比之下,STM32芯片体积较小,集成度较高,低成本、低电压、低功耗,有较强的数据处理能力和运算能力,且具有较强的控制能力。因此,本文基于STM32 芯片,设计了低成本、低功耗、高性能、外设接口丰富的适用于立方体卫星的姿控计算机。文章首先基于立方体卫星对姿控计算机的需求进行分析,进而完成对姿控计算机总体方案的设计;其次,完成姿控计算机各部分的硬件设计;最后,完成姿控计算机的硬件实现和测试。
1 总体方案设计
姿控计算机的功能主要是通过星上多个姿态敏感器的测量信息确定卫星当前姿态,再根据当前姿态信息通过姿态控制算法控制执行机构工作实现对卫星姿态的控制。目前,对于立方体卫星等微小卫星的姿控系统来说,姿态确定中姿态敏感器的主流配置是磁强计、陀螺仪、太阳敏感器和GPS,如果对姿态确定有高精度需求,还可以加入星敏感器来提高定姿精度;姿态控制中常用的执行机构有磁力矩器和动量轮。基于姿控系统的这些配置,本文所设计的姿控计算机总体方案如图4所示。
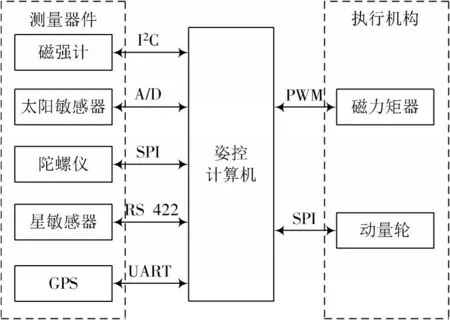
图4 总体方案图
图4 中:姿控计算机主要负责卫星姿态的确定及控制;磁强计用来测量卫星所在位置的地球磁场,通过IC通信协议与姿控计算机进行数据传输,并采用冷备份的方式设计;太阳敏感器用于测量卫星表面与太阳光夹角并产生对应的四象限电流,通过采集芯片转化成IC信号输入姿控计算机,共需3 路IC;陀螺仪用于测量卫星的三轴角速度,通过SPI 与姿控计算机进行数据传输;星敏感器通过星图比对确定卫星当前姿态,通过RS 422与姿控计算机进行数据传输;GPS 模块用于向姿控计算机提供UTC 时间、位置及速度等信息,通过UART与姿控计算机进行数据传输;动量轮通过输出力矩来抵消星上扰动力矩,从而实现卫星的姿态控制,姿控计算机通过1路SPI控制动量轮的驱动芯片来实现对动量轮转速的控制;磁力矩器主要用于星箭分离后卫星的角速度阻尼和三轴稳定时对动量轮的卸载,姿控计算机I/O 口输出PWM 波控制磁力矩器驱动芯片,从而实现对磁力矩器输出力矩的控制。由于卫星姿控系统涉及多个姿态敏感器,要进行大量、快速的姿态信息读取,对数据的传输和处理的实时性要求很高,此外还涉及复杂的姿态确定和控制算法的解算以及执行机构的控制。因此,要求姿控计算机具有很高的数据运算能力和控制能力,外设接口具有很快的数据传输速度。综合卫星任务需求分析,提出姿控计算机的性能要求:运算速度≥150 MHz,SRAM=2 MB,FLASH=1 MB,质量≤0.5 kg,功耗≤2 W(长期三轴稳定);接口需求主要包括:12 路12 位A/D,2 路12 位D/A,4 路IC,2路SPI,1路RS 422,4路RS 232。
2 姿控计算机硬件设计
2.1 核心微控制器选型
STM32 系列微控制器是由ST(意法半导体)推出的基于ARM Cortex⁃M为内核的32位微控制器,它支持32位广泛的应用,文献[13]利用STM32F1 系列芯片设计了基于光纤阵列的高精度太阳跟踪系统;文献[14]基于STM32F4 系列芯片完成了X型四旋翼无人机的设计。STM32F4 系列芯片是基于超低功耗的ARM Cortex⁃M4内核的高性能微控制器,该系列的STM32F407 工作频率高达168 MHz,拥有140个快速I/O端口和多达15个标准的通信接口(2个CAN接口,4个USART,2 个UART,3 个IC 接口,3 路SPI,1 个SDIO 接口),可在低电压下(1.8~3.6 V)工作。基于STM32F407 的这些资源和特点,满足姿控计算机对控制器低功耗、高性能以及接口丰富的要求,此外,该芯片的正常工作温度范围在-40~+85 ℃,满足卫星上的工作条件。因此,本文选用STM32F407 作为主芯片,加上外围电路来实现姿控计算机的设计。
2.2 基础外围电路设计
2.2.1 时钟电路
使用CC5V⁃TIA⁃32.768 芯片给系统提供32.768 kHz 频率作为外部时钟,通过锁相扩频和预分频器可配置两个AHB 总线,高速APB(APB2,最高频率可达84 MHz)和低速APB(APB1,最高频率可达42 MHz)。
2.2.2 供电电路
为了简化供电电路,在选用传感器和执行器等部件时,尽可能地挑选供电电压在同一范围的器件,因此整个姿控系统只需要两种供电标准:5 V和3.3 V。外部母线供电电压为7.4 V,因此需要通过转压芯片来实现,本文分别使用了ADP3303和LMZ12001 两个芯片来实现5 V 和3.3 V 的供电。为了输入输出稳定,不受其他信号干扰,在输入输出引脚与地之间串联了电容。
2.2.3 复位电路
TPS382X 系列监控器主要为DSP 和基于处理器的系统提供电路初始化和定时监控。该系列器件由内部分压器设置一个固定的检测门限电压,当电源电压高于门限电压时,产生复位信号,当电源电压低于门限电压时,保持----------RESET 有效。本文选用该系列的TPS3823⁃3.3芯片,该芯片还包括一个手动复位输入引脚----MR,---MR 为低电平时激活----------RESET,如图5 所示。
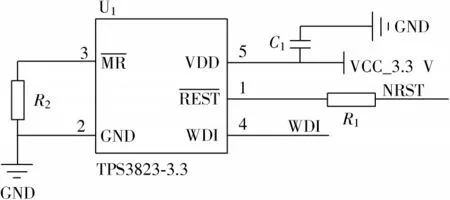
图5 复位电路
2.3 姿控部组件接口设计
2.3.1 磁力矩器驱动电路
磁力矩是由通电线圈在磁场中产生的安培力而来,可通过控制线圈中的电流大小来调节磁力矩的大小。立方体卫星上使用驱动芯片输出电流来驱动磁力矩器,驱动芯片由主芯片STM32F407 的I/O 口输出PWM 波控制,通过控制PWM 波的占空比可控制输出电流的大小。磁力矩器工作所需的驱动电流大小在1 A 以下,主芯片I/O 口的输出电压范围是0~3.3 V。因此,本文选用DRV8839 芯片作为磁力矩器的驱动芯片,该芯片可提供高达1.8 A 的电流输出,具有较强的驱动能力,满足磁力矩器的驱动需求;工作电压范围在1.8~7 V,可由主芯片的I/O 口直接控制。磁力矩器的驱动电路设计如图6 所示。
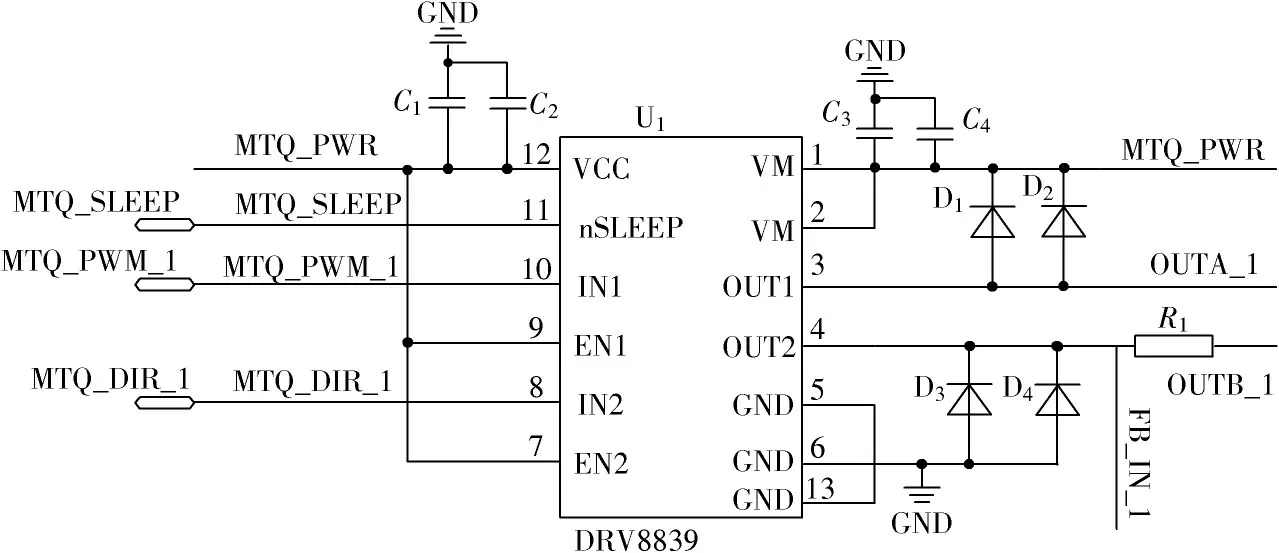
图6 磁力矩器驱动电路
2.3.2 动量轮驱动电路
本文选用的动量轮是福尔哈贝公司的2610012B 型动量轮,该动量轮在12 V 电压下工作,最大转速为6 400 V/min,最大转矩3.1 mN·m,额定转矩2.85 mN·m,转速常数为543 min/V,转速由驱动芯片输出电压的大小控制,驱动芯片通过SPI 接收姿控计算机的控制指令并转换成电压输出驱动动量轮。AD5664 是一款低功率、16 位的DACs,工作电压在2.7~5.5 V,与标准SPI 接口兼容,符合上述要求。
2.3.3 太阳敏感器、磁强计接口电路
太阳敏感器和磁强计都是通过IC 与姿控计算机进行通信的。本文考虑在立方体卫星三个面上安装太阳敏感器,每个面上安装一个,每个太阳敏感器产生四象限电流,由两块电流采集芯片INA3221Q1 采集并转换成数字信号,通过IC 接口与姿控计算机进行数据交换;磁强计产生的信号通过放大电路和A/D 转换芯片ADS1115 进行数据转换后,通过IC 与姿控计算机进行数据交换。主芯片STM32F407 内部集成了3 路IC,不满足系统需求,且片内集成的IC 不够稳定,因此本文设计利用扩展芯片对片内IC 进行扩展。TCA9544A 是一款四通道双向转换IC 多路复用器,最高频率可达400 kHz,本文利用TCA9544A 将1 路IC 扩展成4 路,供3 个太阳敏感器和磁强计使用。扩展电路如图7 所示。
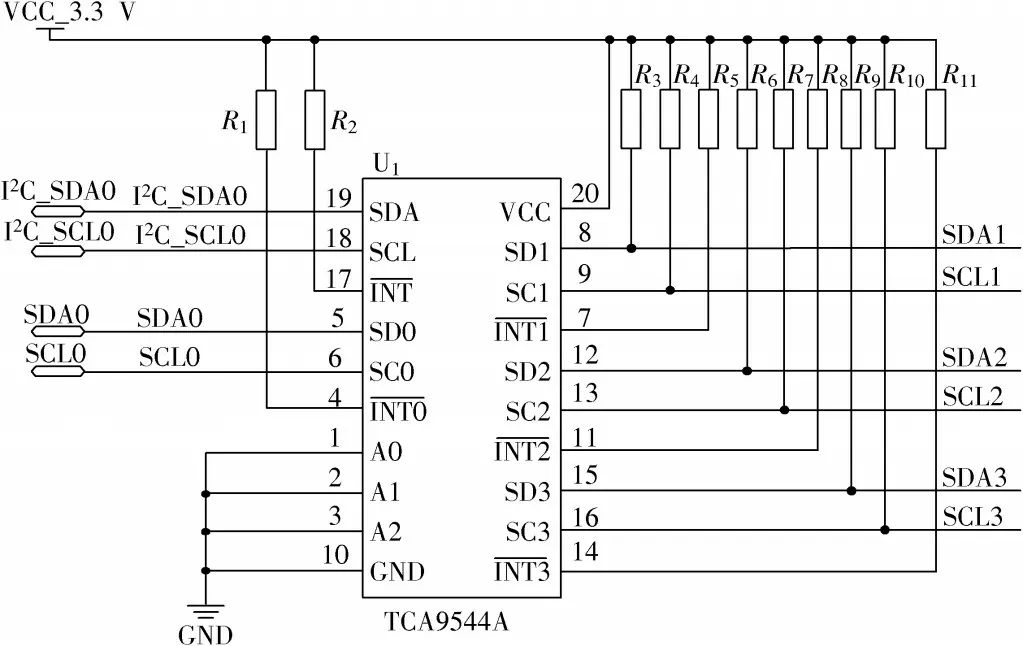
图7 I2C 扩展电路
2.3.4 陀螺仪接口电路
2.3.5 星敏感器接口电路
本文选用的星敏感器是天银星际(TY⁃SPACE)的纳型星敏感器NST⁃4,该型星敏感器体积小、质量轻(<200 g)、功耗低(<0.6 W)、精度高(5″,3)、具有高动态性能(2(°)/s)、高抗杂光性能,通信接口是RS 422。主芯片STM32F407 片内没有集成RS 422 通信接口,因此需要选用转换芯片将1 路串口转换成RS 422 电平供星敏感器通信。MAX3488 是用于RS 485 和RS 422 通信的低功率收发器,工作电压3.3 V。这款芯片的特点是它的slew⁃rate 限制驱动器能最大限度地减少电磁干扰和减少由不正确的电缆端引起的反射,允许无错误的数据传输速率高达250 Kb/s,满足本文需求。因此,本文选用MAX3488 完成RS 422 的电平转换。
2.3.6 GPS 接口电路
GPS 模块是基于STM32F205 设计的,与姿控计算机通过UART 进行通信,STM32F205和主芯片STM32F407都有UART 通信接口,本文使用STM32F205 的USART1(PA9,PA10)和STM32F407 的UART4(PC10,PC11)进行通信。
3 硬件实现与测试
3.1 硬件实现
根据上述的总体设计方案和硬件电路的设计,姿控计算机的最终实物如图8 所示,与星上其他部组件之间通过PC104 连接,与姿控各部组件的硬件接口通过Molex 连接器连接。姿控计算机的各项性能指标如表1所示,满足姿控系统对姿控计算机的要求。

图8 姿控计算机实物图
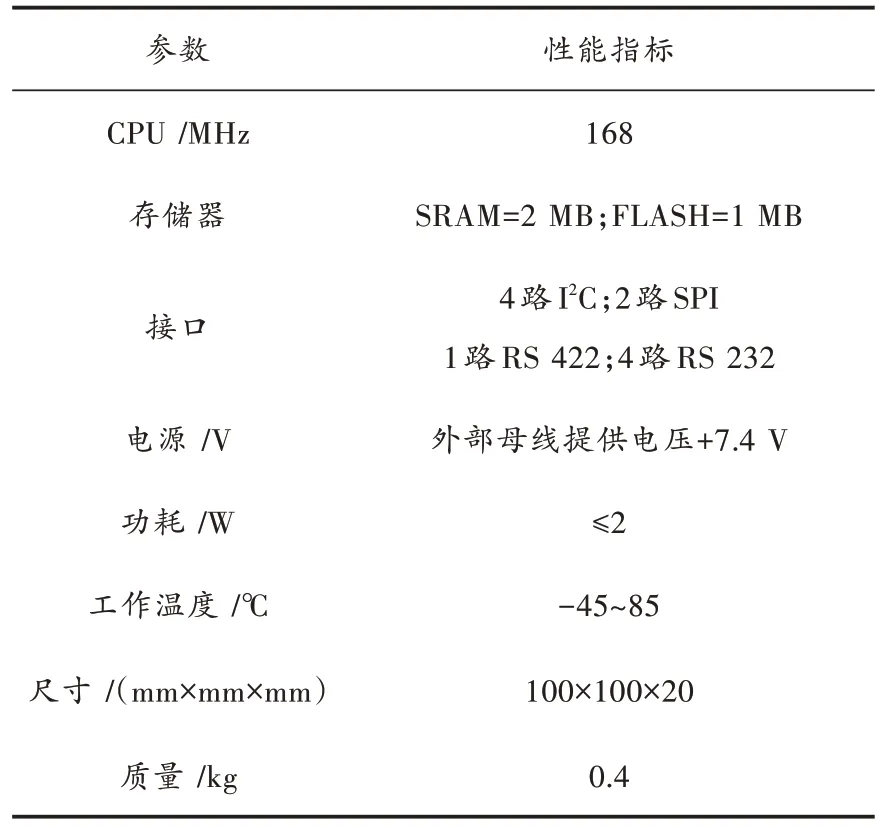
表1 主要性能指标
3.2 测试结果与分析
将姿控计算机接入卫星总体进行系统测试,如图9所示。
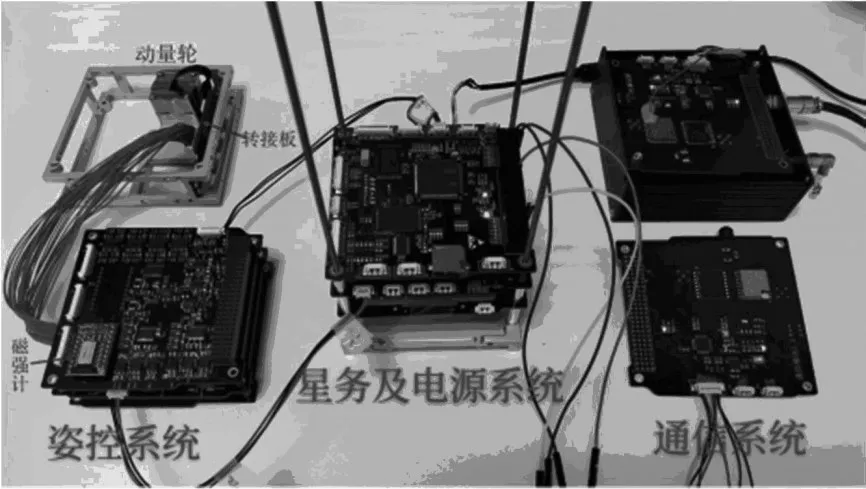
图9 测试实物图
图中左侧部分为姿控系统,包括磁棒板、姿控计算机和磁强计板,动量轮通过转接板引出;中间部分为电源系统和星务计算机,分别负责星上供电和星上任务管理;右侧是通信模块,负责遥控遥测信息的收发。测试结果如图10 所示。
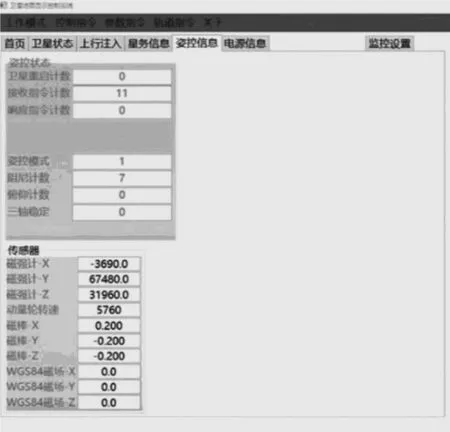
图10 测试结果显示
由测试结果可知,姿控系统各敏感器读数正常,执行机构工作正常,姿控计算机工作状态良好,满足设计要求。
4 结语
本文基于STM32F407 芯片设计了立方体卫星姿控计算机,主要包括主芯片的一些基础的外围电路和姿控计算机与姿控部组件之间的接口设计。设计方案考虑了立方体卫星上常用的多种姿态敏感器和执行机构,使之可以适应多种姿控配置模式的要求;主芯片的超强运算能力和控制能力能够满足复杂的姿控算法实时性需求以及系统多任务处理能力。经过实际测试应用表明,本方案所设计的姿控计算机具有很强的实用性、可靠性和稳定性,低成本、低功耗,可作为立方体卫星姿控系统的标准组件。
猜你喜欢
科普童话·学霸日记(2023年7期)2023-08-21
中学生数理化(高中版.高考理化)(2020年9期)2020-10-27
中学生数理化(高中版.高考理化)(2020年9期)2020-10-27
无人机(2020年4期)2020-10-12
中学生数理化(高中版.高考数学)(2020年1期)2020-02-20
中小企业管理与科技(2019年9期)2019-05-28
中学生天地(A版)(2017年6期)2017-06-23
系统工程与电子技术(2016年11期)2016-11-11
太空探索(2016年9期)2016-07-12
小学生导刊(低年级)(2016年6期)2016-07-02