
基于PS0的模糊PID与自抗扰耦合控制的调平系统仿真研究
2022-02-22 01:07徐凤乾田勇王天义
电脑知识与技术 2022年36期
关键词:优化算法
徐凤乾 田勇 王天义
关键词:载重平台;液压同步控制;联合仿真;优化算法
中图分类号:TP311 文献标识码:A
文章编号:1009-3044(2022)36-0008-04
随着我国工业化建设的不断发展,液压调平控制系统的研究得到逐步完善,广泛应用于工业、农业、畜牧业等领域[1]。随着工作对象对调平控制的要求越来越高,液压控制系统不仅需要具有较好的安全性和稳定性,还应具备高精度和高效率[2]。
截至目前,模糊PID 已经经历了半个世纪的发展,虽然被广泛应用于各行各业,但是依旧存在精度低等亟待解决的问题[3-4],尤其是当遇到单输入多输出以及多输入多输出等复杂的系统模型时,传统的模糊PID效果很不理想,具有较大的动态误差。因此,因此本文提出了一种基于PSO的模糊PID与自抗扰耦合控制,能很大程度地弥补模糊PID的控制缺陷。并采用AMESim与Simulink联合仿真的方法,对载重平台液压调平控制系统进行仿真分析,得出在不同控制策略下系统的性能对比分析,验证了基于PS0的模糊PID与自抗扰耦合控制在优化液压载重平台调平跟踪误差的有效性。
1 调平方案设计
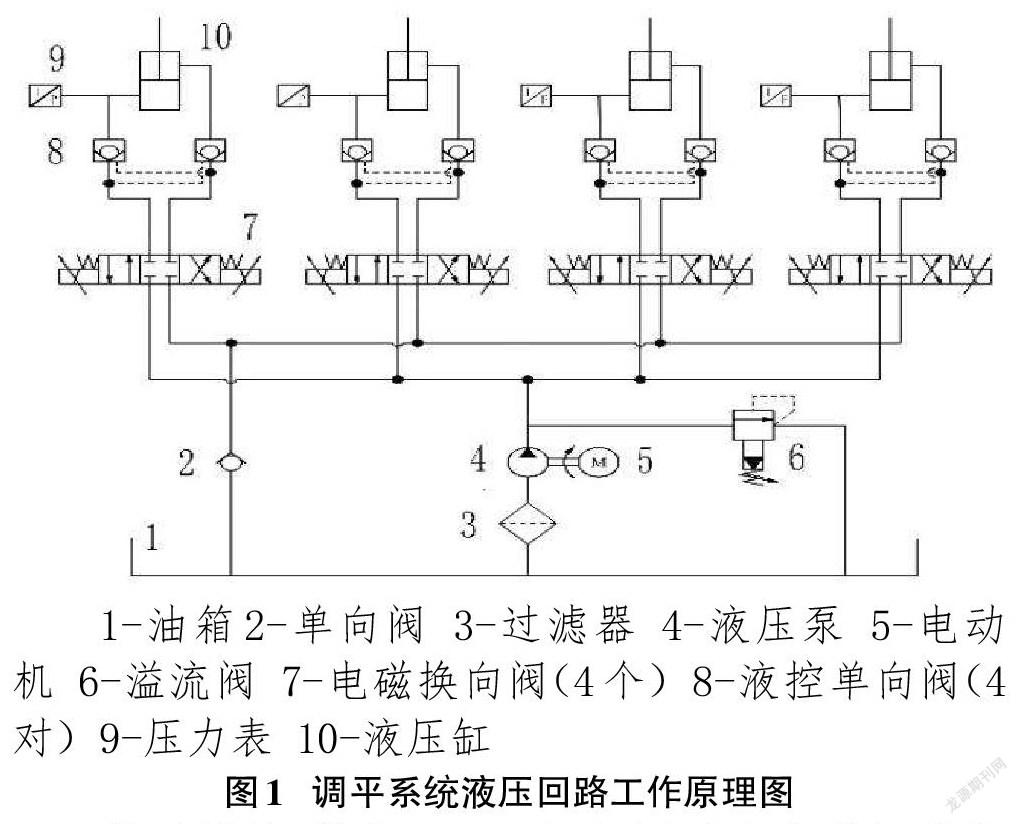
1.1 调平系统液压回路
本文采用电液伺服阀通过液控单向阀控制液压缸的方式。调平系统液压回路如图1所示。
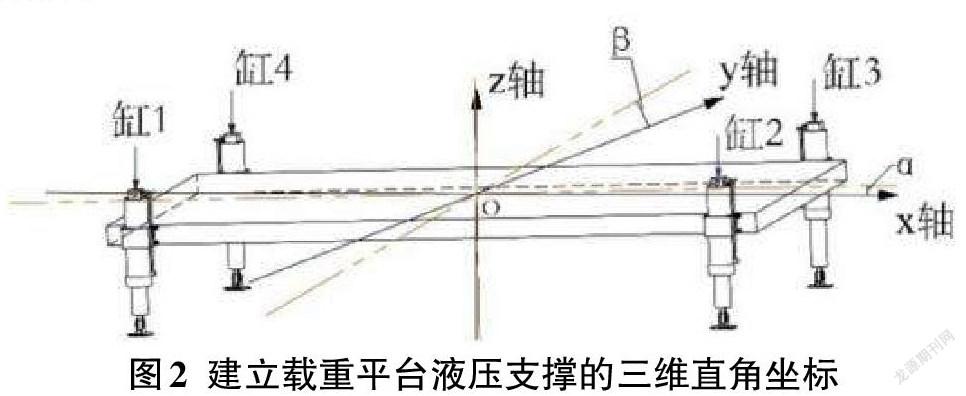
1.2 调平策略分析
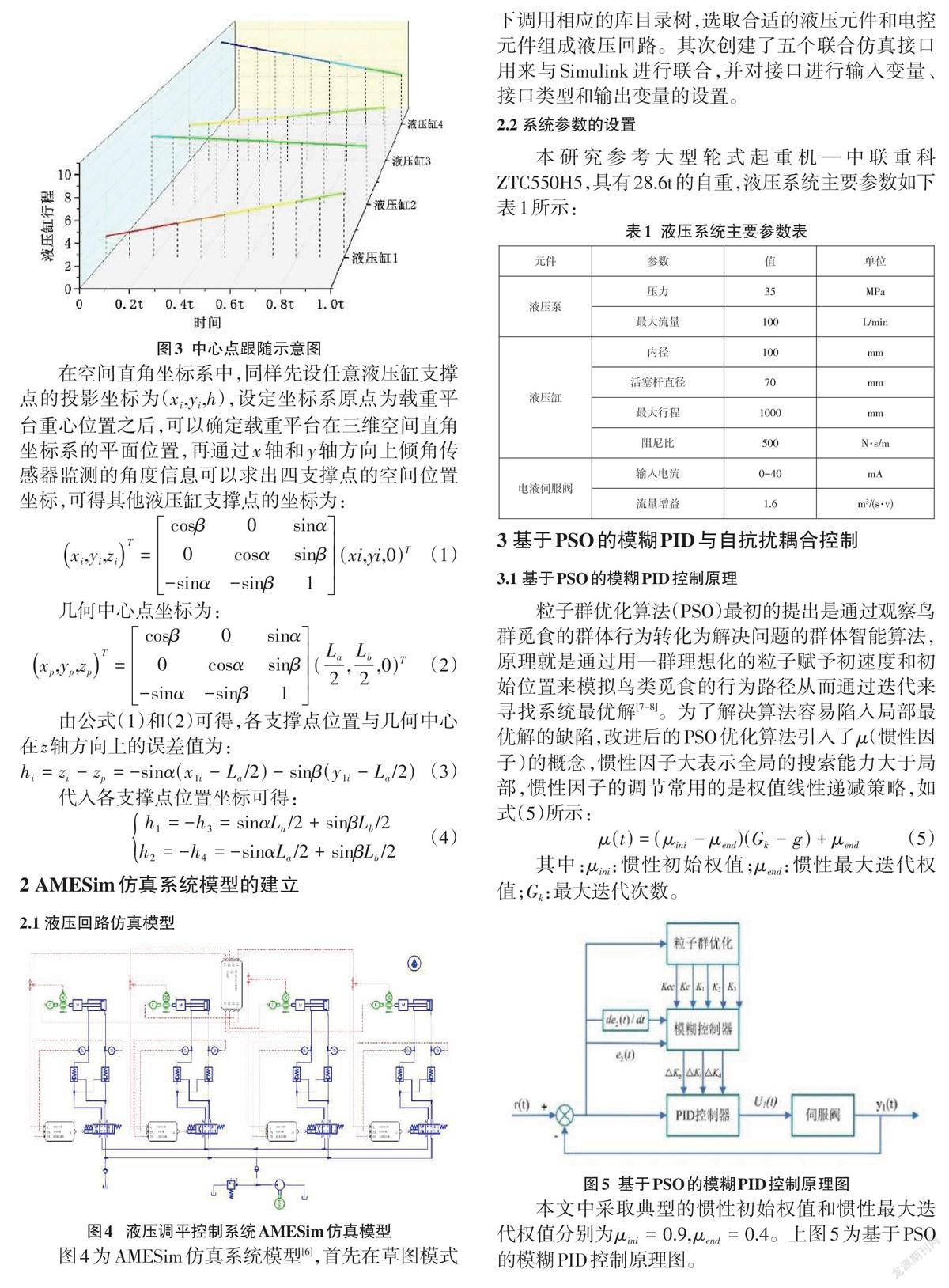
调平策略就是通过调节各个液压支撑而使载重平台达到水平或者平行于工作面的控制策略[5],为了便于分析和研究,将载重平台进行简化并建立空间直角坐标系,如图2所示。中心点跟随是目前使用最多的调平策略,它在调平过程中整体调平行程短,其原理是液压载重平台始终保持中心点位置不变,中心点位置即为载重平台的几何中心。跟随动作如图3所示:
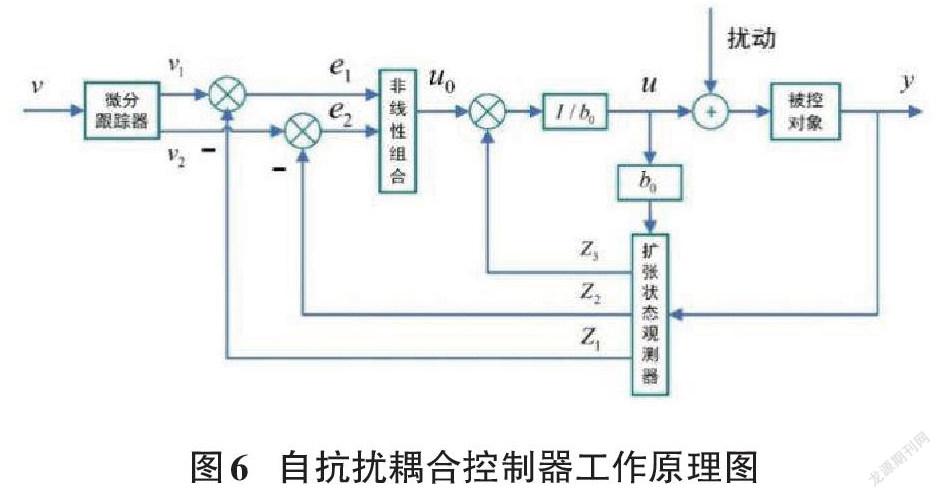
3.2 自抗扰控制原理
自抗扰控制器主要由微分跟踪器、校正反馈控制器和扩张状态观测器三个部分组成,它的工作原理图如下图6所示。其中非微分跟踪器可以提取输入信号v 并降噪,具有較强的抗干扰能力;非线性校正反馈控制器(NLSEF)可以减少系统对控制过程中产生干扰的敏感性,可以随时控制系统的动态瞬时响应,增强系统的稳定性;扩张状态观测器主要是用来监测系统未建模部分可能产生的外部未知扰动,然后提前抵消扰动,实现系统的动态实时反馈。
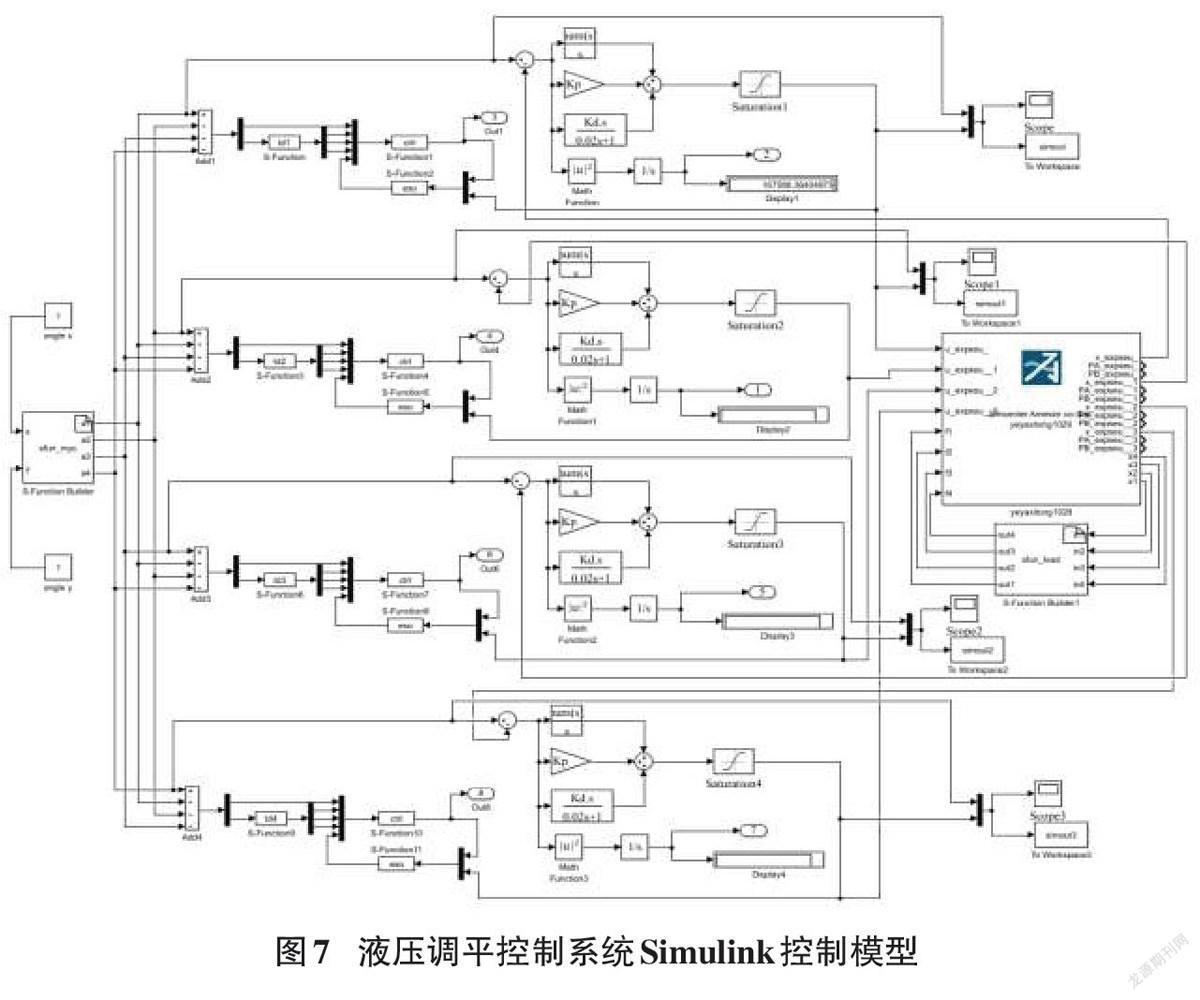
3.3 基于Simulink 搭建耦合控制模型
将基于PSO的模糊PID控制与自抗扰进行耦合控制,并在Simulink中搭建控制模型如图7所示。
4 系统联合仿真
为了探究基于PSO的模糊PID与自抗扰耦合控制与传统模糊PID控制的稳定性区别,将基于PSO的模糊PID与自抗扰耦合控制下的液压调平系统分别进行阶跃信号测试和正弦信号测试,并对传统模糊PID控制下的跟随曲线进行对比分析。
4.1 阶跃信号下控制结果对比
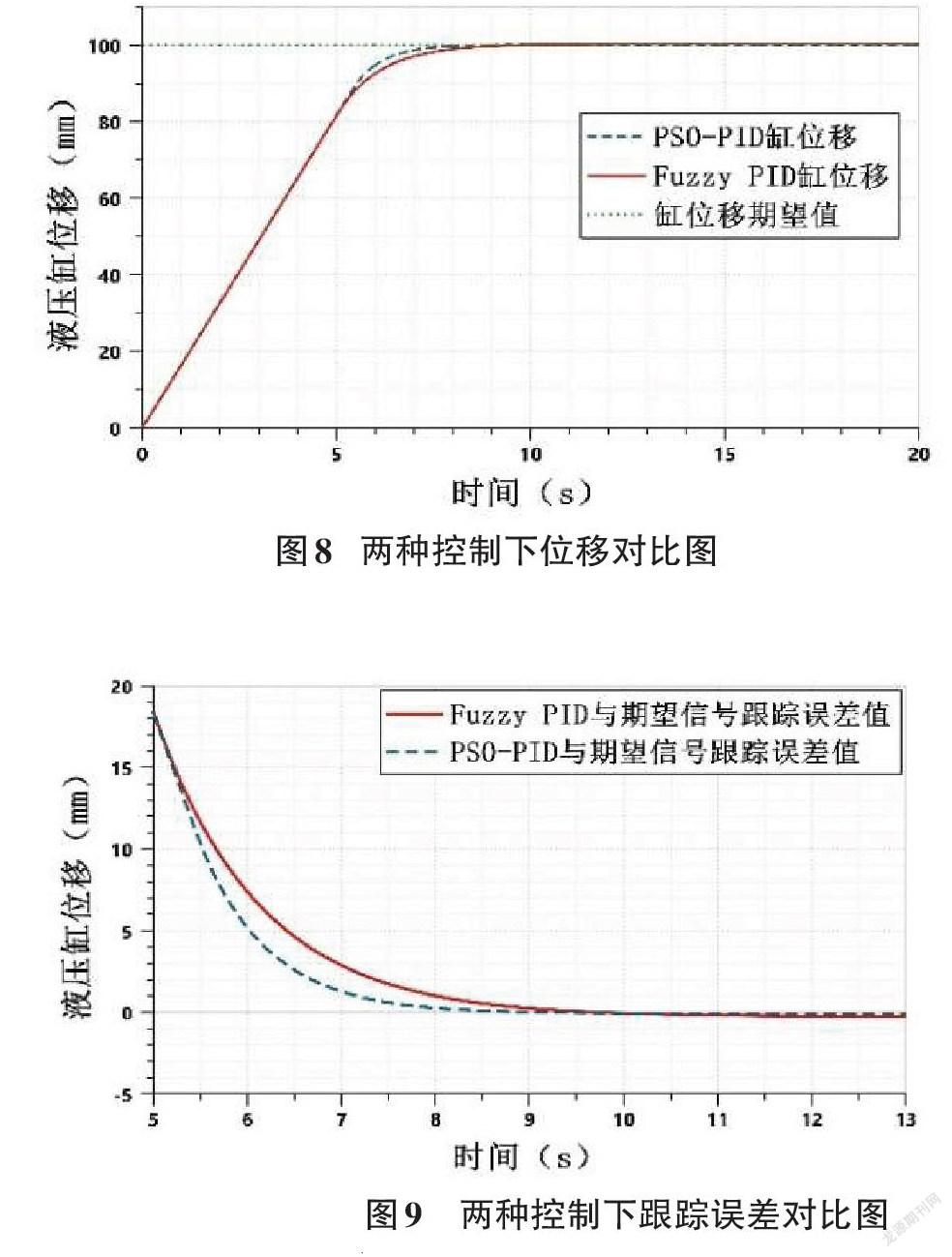
当期望信号为阶跃信号时,用传统的模糊PID控制和基于PSO的模糊PID与自抗扰耦合控制分别对液压调平系统进行控制,将两种控制下液压缸的位移曲线与期望曲线进行对比,如下图8所示,可以看出,在0s-5s左右,两种控制下的液压缸位移保持一致,接着在5s-10s,可以看出在PSO-PID的控制下,液压缸位移更加快速地接近于缸位移期望值。
为了更明显地观察两种控制下的液压缸跟踪误差,将两种控制下的液压缸位移与缸位移期望值进行比较,得出跟踪误差值,并截取有明显区别的5s-13s 区间,如图9所示。
可以看出,在PSO-PID控制下系统运行7.5s就能保证误差小于0.5mm,在Fuzzy PID控制下则需要9s,节省了1.5s 的跟踪时间。这说明当期望值为阶跃信号的情况下,基于PSO的模糊PID与自抗扰耦合控制比传统的模糊PID控制具有更小的跟踪误差和更快的响应。
4.2 正弦信号下控制结果对比
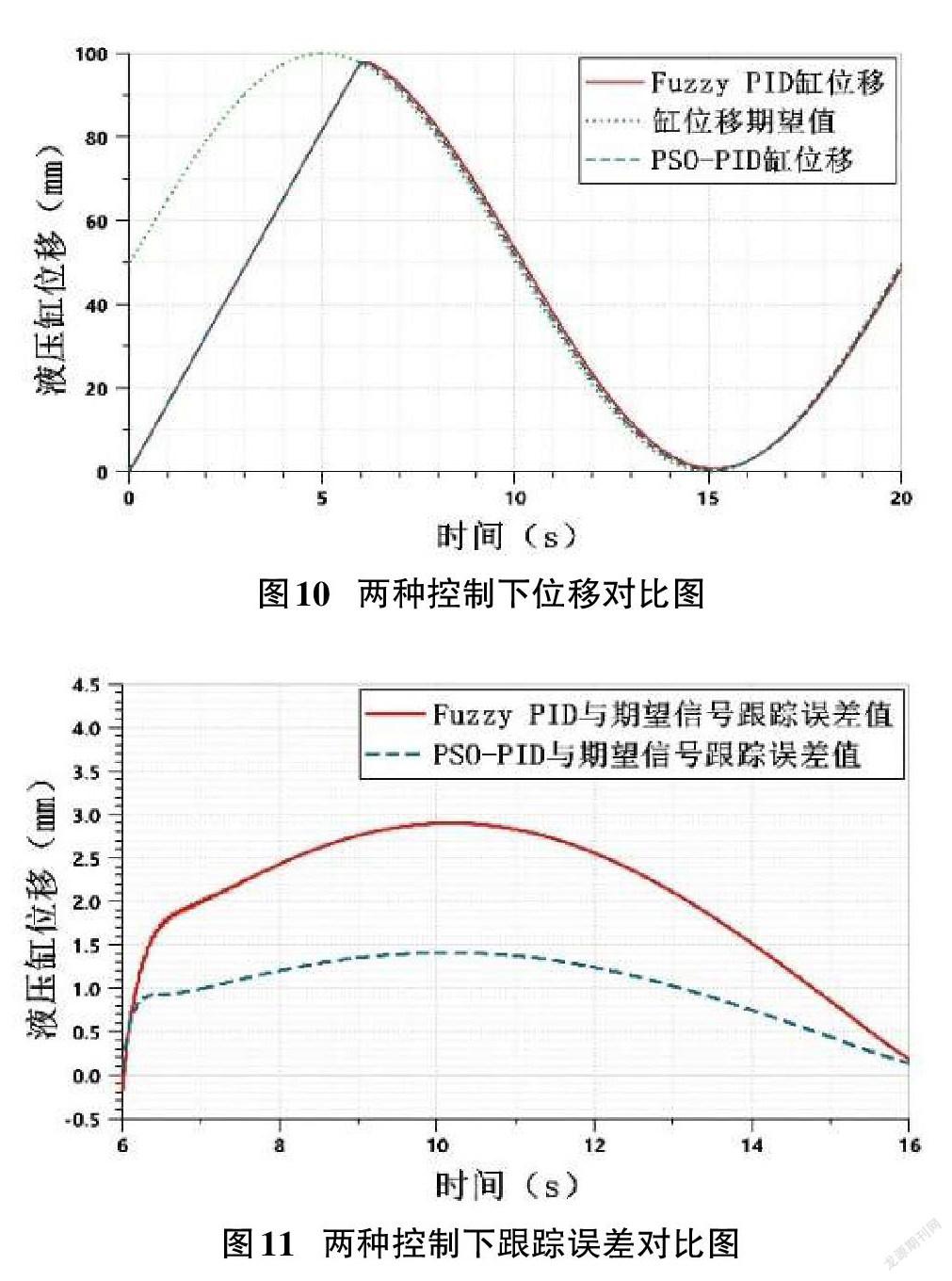
当期望信号为正弦信号时,用传统的模糊PID控制和基于PSO的模糊PID与自抗扰耦合控制分别对液压调平系统进行控制,将两种控制下液压缸的位移曲线与期望曲线进行对比,如下图10所示。可以看出在0s-6s,两种控制下的液压缸位移保持一致,接着在6s-15s,可以看出在PSO-PID的控制下,液压缸位移更加快速的接近于缸位移期望值。
为了更明显地观察两种控制下的液压缸跟踪误差,将两种控制下的液压缸位移与缸位移期望值进行比较得出跟踪误差值,并截取有明显区别的6s-16s区间,如图11所示:
可以看出,在6s-16s区间内,PSO-PID控制策略下的系统运行误差始终小于1.5mm,在Fuzzy PID控制下则达到了3mm的误差值。这说明当期望值为正弦信号的情况下,基于PSO的模糊PID与自抗扰耦合控制比传统的模糊PID控制的跟踪误差约降低了50%。
5结论
本文以液压载重平台为研究对象,对平台的调平和控制策略进行研究。随着目标对精度和效率的要求越来越高,对平台的效率、稳定性和通用性也提出了新要求。针对目前的液压调平系统存在非对称性误差、调平策略单一和控制容易陷入局部最优等问题。以AMESim与Simulink联合仿真平台为载体,通过对液压系统、调平策略和控制等多角度分析和优化,提出了一种基于PSO的模糊PID和自抗扰耦合控制的液压调平系统。从以上分析可以得出,基于PSO的模糊PID与自抗扰耦合控制比Fuzzy PID控制具有更高的系统稳定性、更快的速度响应和更小的位移跟踪误差。能够有效地降低同步误差以及速度振荡的问题,有助于推进工业现代化发展朝着精密化的方向发展,对后续的研究和生产具有一定的指导意义。
猜你喜欢
课程教育研究·新教师教学(2016年6期)2017-04-10
湖南师范大学学报·自然科学版(2017年1期)2017-03-14
科技与创新(2017年1期)2017-02-16
科技与创新(2016年7期)2016-04-20
科技传播(2016年3期)2016-03-25
现代电子技术(2014年22期)2014-11-14
