
考虑混合约束的柔顺机构拓扑优化设计
2022-02-28 12:55占金青王云涛朱本亮
振动与冲击 2022年4期
占金青, 王云涛, 刘 敏, 朱本亮
(1.华东交通大学 机电与车辆工程学院,南昌 330013;2.华南理工大学 广东省精密装备与制造技术重点实验室,广州 510641)
柔顺机构是通过其柔性组件的变形来实现运动、力传递或能量转换的一种整体式机构[1-2]。柔顺机构对装配过程的需求降至最低,同时它能够减少摩擦、磨损及润滑,具有高精度和高适应性优点。因此,柔顺机构在精密加工、微纳操作及微机电系统等许多领域应用广泛[3-5]。
基于拓扑优化方法设计的柔顺机构构型的特征尺寸有时太小,难以加工制造,并且容易引起应力集中现象,导致疲劳寿命降低。因此,考虑最小尺寸控制进行柔顺机构拓扑优化设计是非常有必要的。Guest等[6-7]采用Heaviside函数的映射方法进行实相材料最小尺寸控制的结构拓扑优化设计;在此基础上,提出了一种多相映射拓扑优化方法,能够实现实相和空相两相材料结构最小尺寸控制。荣见华等[8]采用两种不同的Heaviside映射分布过滤实相和空相设计变量,进行考虑最小尺寸控制的结构拓扑优化设计,获得的拓扑结构清晰。Sigmund[9]引入基于图形学中侵蚀和扩张算子的映射方法,实现了结构的实相和空相最小尺寸控制。Wang等[10]提出了一种基于侵蚀、中间和扩张映射的拓扑优化鲁棒性列式,可以同时控制实相和空相的最小尺寸,但是每次迭代需要进行多次有限元分析,导致计算成本增加。Zhou等[11]提出了一种基于几何约束的最小尺寸控制拓扑优化设计方法。
为了满足机构的静强度要求,需要考虑应力约束进行柔顺机构拓扑优化设计。Saxena等[12]采用基结构法进行基于局部应力约束的柔顺机构拓扑优化设计,计算成本高。Chu等[13]采用参数化水平集方法进行多相材料柔顺机构应力约束拓扑优化设计。Lopes等[14]采用拓扑导数方法进行柔顺机构应力约束拓扑优化设计。Leon等[15]考虑全局应力约束进行柔顺机构拓扑优化设计,以满足机构的静强度要求。占金青等[16]采用P范数方法进行柔顺机构应力约束拓扑优化设计。Pereira等[17]研究了不同应力极限约束值及灵敏度过滤半径对柔顺机构拓扑优化结果的影响规律。
目前,现有研究仅仅单独考虑制造约束或应力约束进行柔顺机构拓扑优化设计,没有综合考虑制造约束和应力约束进行柔顺机构混合约束拓扑优化设计。本文提出一种综合考虑最小尺寸控制和应力约束的柔顺机构混合约束拓扑优化设计方法。采用改进的固体各向同性材料插值模型描述材料分布,利用多相映射方法同时控制实相和空相材料结构的最小尺寸,采用最大近似函数P范数求解机构的最大应力,以柔顺机构的输出位移最大化作为优化目标,建立综合考虑最小尺寸控制和应力约束的柔顺机构混合约束拓扑优化模型,利用移动渐近优化算法进行混合约束拓扑优化问题求解,通过数值算例对本文提出的方法的有效性进行验证。
1 柔顺机构混合约束拓扑优化模型
1.1 材料插值模型
对于柔顺机构混合约束拓扑优化问题,采用改进的SIMP(solid isotropic material with penalization)材料插值模型[18]描述结构的材料分布,其表示为
(1)
式中:Ee为单元e的材料弹性模量;φi为单元设计变量;k为惩罚系数,取值为3;E0和Emin分别为实体材料和空洞材料的弹性模量;φmax和φmin分别为设计变量的最大值和最小值。
1.2 最小尺寸控制
多相映射方法[19]采用Heaviside函数将设计变量场映射到物理变量场,无需添加额外的约束条件,能够实现实相和空相材料结构的最小特征尺寸控制;因此采用多相映射方法进行柔顺机构构型的最小制造尺寸控制。

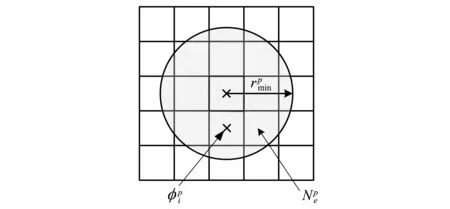
图1 多相映射示意图Fig.1 Schematic of multiple phase projection
(2)
式中,xi为单元i的中心坐标。
(3)
式中:ωp为双曲线正切的非线性函数;ω为常数权重函数,表示为
(4)
对于实相和空相材料,非线性函数ωp分别取为
(5)
(6)
式中,αs和αv为可调参数,分别取为2×10-3和5×
10-4。
定义φrange=φmax-φmin,用来计算np
(7)
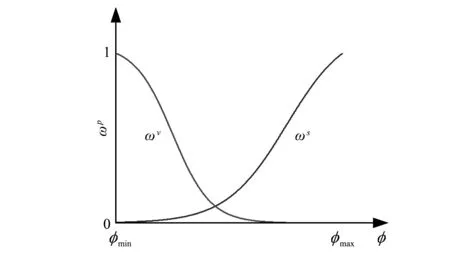
图2 非线性函数ωp曲线图Fig.2 The nonlinear weighting function ωp

(8)
式中,β为控制近似程度的参数,当β=0时,映射函数相当于线性映射,当β趋近于∞时,映射函数趋近于Heaviside阶跃函数。
(9)
1.3 应力约束
结构有限元分析中,任一单元e的应力可表示为
σe=DBue=[σ11,σ22,σ12]T
(10)
式中:σe为单元的应力列阵;D为材料的弹性矩阵;B为应变位移矩阵;ue为单元节点位移列阵;σ11和σ22分别为单元x和y方向的主应力;σ12为单元的剪切应力。
为了避免应力约束引起的奇异解问题,采用应力松弛方法[22]进行单元应力惩罚,因此,任一单元e的von Mises等效应力表示为
(11)
式中:q为松弛系数,取值为0.5;σvM为未松弛的e单元的von Mises等效应力;V为辅助矩阵,其表示为
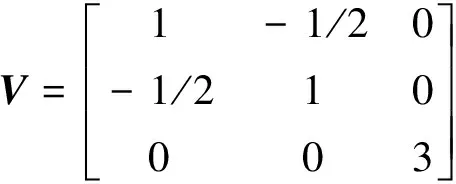
(12)
将机构的设计区域离散成有限个单元,每个单元对应一个局部应力约束,引起总的约束数太大,使灵敏度分析计算量巨大。为了提高计算效率,采用P范数方法[23]将所有单元的局部应力约束进行最大近似处理,转变为全局的应力约束问题。P范数应力σPN可表示为
(13)
式中:P为P范数参数;ve为单元体积。
当P的值趋近于∞,P范数应力值趋近最大的应力值,但是,P的取值过大,容易引起非线性程度越明显,甚至导致优化迭代求解困难。然而,P取值过小,引起P范数应力与最大应力在数值上的差异较大。因此,为了减少两者在数值上的差异,采用自适应约束缩放方法[24]修正P范数应力
σmax≈γσPN
(14)
式中,γ为自适应约束缩放系数。
当迭代步数n≥1,γn可表示为
(15)
式中:ζn为控制参数,取值为ζn=0.5;γ0=1。
1.4 拓扑优化模型
采用多相映射方法进行拓扑优化实体和空相材料结构的最小尺寸控制;将柔顺机构输出端的位移最大化作为优化目标函数,以满足机构的运动需求;以机构的应力作为约束,以满足静强度指标;综合考虑最小尺寸控制和应力约束,建立柔顺机构混合约束拓扑优化数学模型为
(16)

2 灵敏度分析及优化算法
采由式(16),机构的输出位移对设计变量的灵敏度可求得为
(17)

(18)
由式(9)对设计变量求导,式(18)中的∂ρe/∂φi项可求得为
(19)
(20)
(21)
式(21)右端的∂ωp/∂φi项可由式(5)和式(6)分别对设计变量求导得到
(22)
(23)
由式(16),体积约束的灵敏度可求得
(24)
由式(14),最大应力σmax对设计变量的灵敏度可求得
(25)
对式(25)等号右边的各项进行求解,则有
(26)
(27)
由式(11)和式(12),式(27)右边的∂σvM/∂σe项可求得为
(28)
单元应力矢量σe对单元密度ρe的灵敏度可由式(10)求得
(29)
将式(28)和式(29)代入式(27)可得
(30)
令有
(31)
将式(26)、式(30)及式(31)代入式(25)中,可得最大应力对设计变量的灵敏度为
(32)
令有伴随矢量λ满足
(33)
式中,Ke为单元的刚度矩阵。
由式(33),式(32)改写为
(34)
移动渐近线优化算法[25](method of moving asymptotes,MMA)适用于复杂的多约束优化问题求解,具有较好的鲁棒性。因此,采用MMA算法求解基于混合约束的柔顺机构拓扑优化设计问题。
3 数值算例
本章通过反向器和咬合机构两个数值算例来验证本文提出的柔顺机构混合约束拓扑优化设计方法的有效性。所有算例中,实体材料选用Al7075,材料的弹性模量E0为68.9 GPa,空洞材料的弹性模量Emin为10-4;屈服强度为275 MPa,泊松比为0.33。单元设计变量的初始值均取值为-0.3;控制参数β的初始值取为1,每间隔50迭代步增大1倍,最大值为16;P范数参数P取值为8。
3.1 反向器

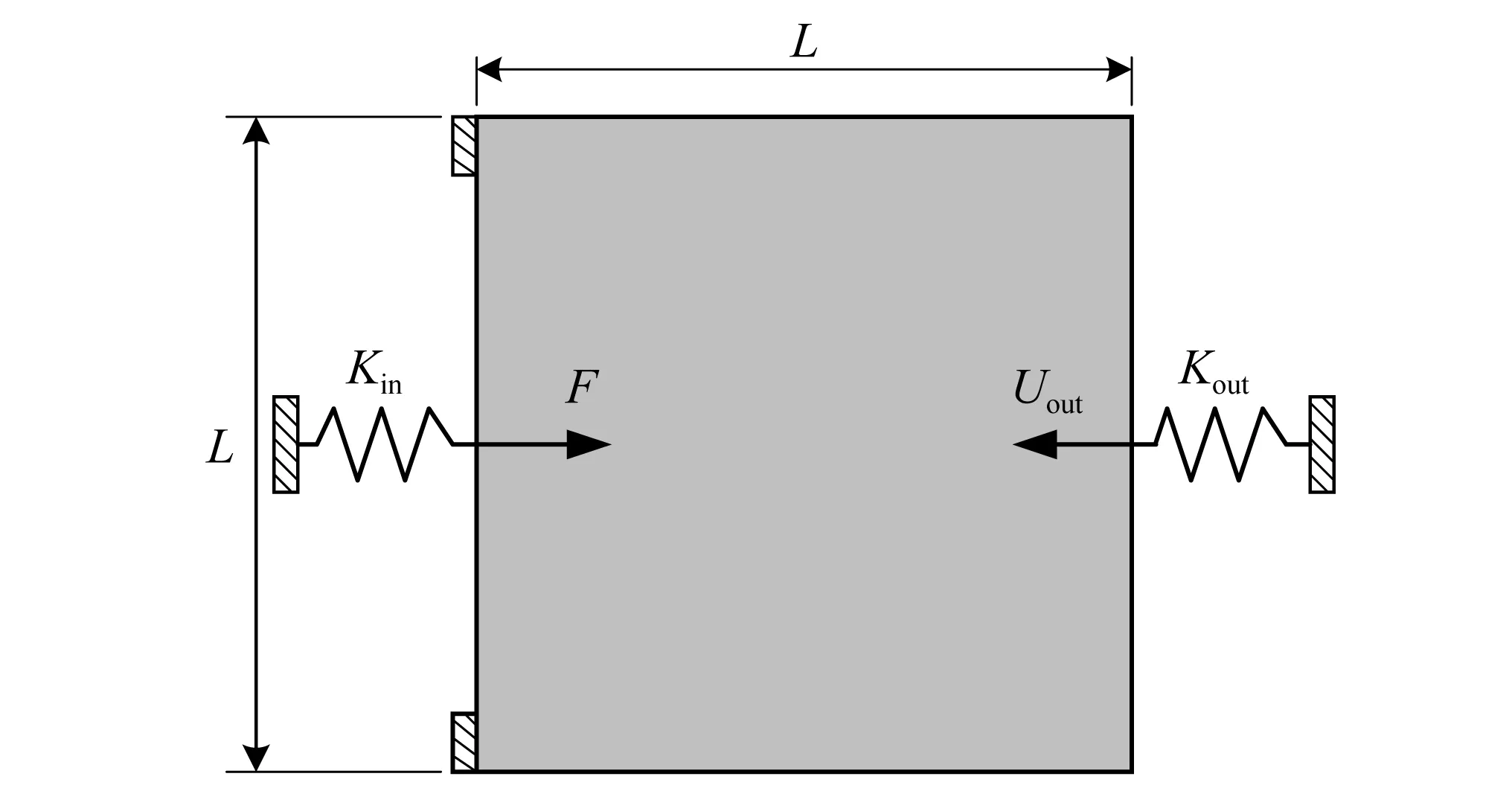
图3 柔性反向器设计域Fig.3 Design domain for compliant inverter mechanism
为了验证提出的方法有效性,在相同设计参数条件下,采用无最小尺寸控制、无应力约束,有最小尺寸控制、无应力约束,无最小尺寸控制、有应力约束,有最小尺寸控制、有应力约束四种拓扑优化模型进行柔性反向器设计,反向器的拓扑优化结果分别如图4~图7所示。
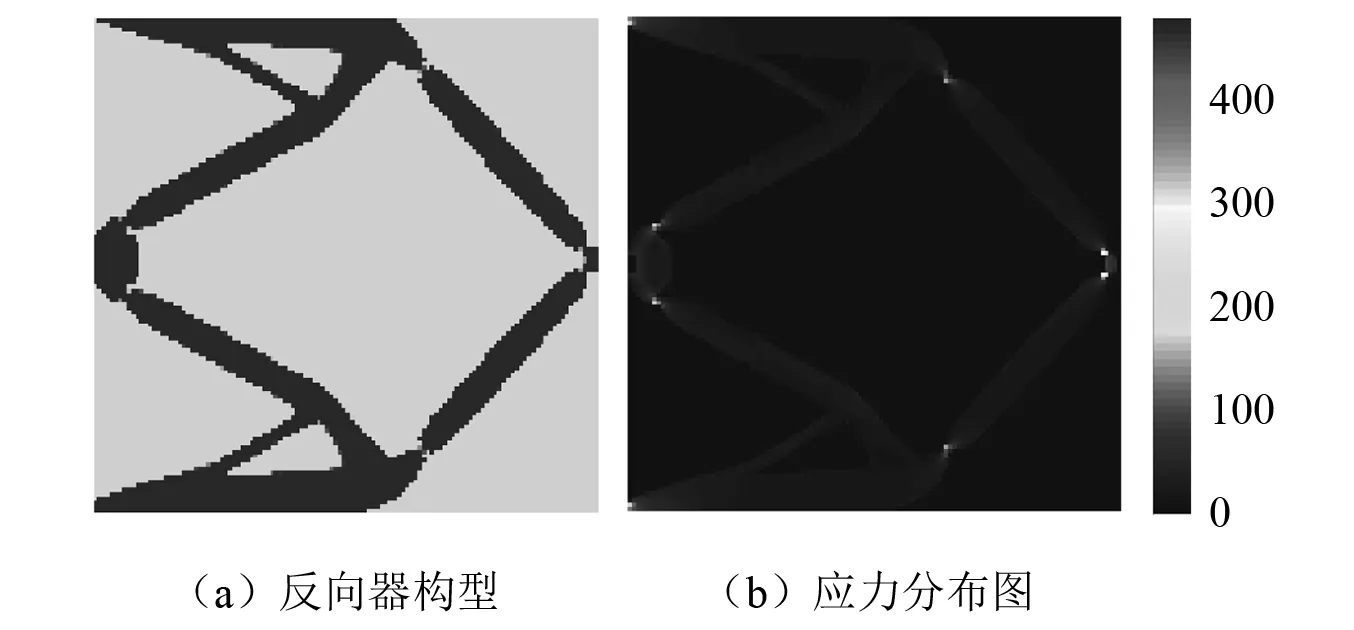
图4 无最小尺寸控制、无应力约束的反向器拓扑优化Fig.4 Topological design of inverter mechanism without minimum length scale control and without stress constraints
无最小尺寸控制、无应力约束拓扑优化获得的柔性反向器拓扑构型存在实相和空相细小尺寸特征,最大应力值(480.123 MPa)出现在变形较大的单节点连接铰链区域,结构的应力集中现象非常明显。有最小尺寸控制、无应力约束拓扑优化获得的反向器构型的实相和空相材料结构能够满足最小尺寸要求;最大的应力值为425.598 MPa,表明添加最小尺寸控制可以在一定程度减少机构的应力水平,但是应力集中现象仍然明显。
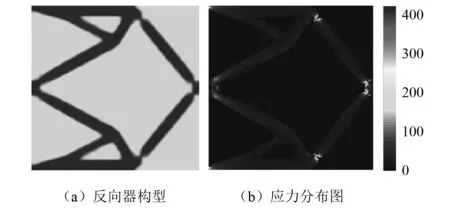
图5 有最小尺寸控制、无应力约束的反向器拓扑优化Fig.5 Topological design of inverter mechanism with minimum length scale control and without stress constraints
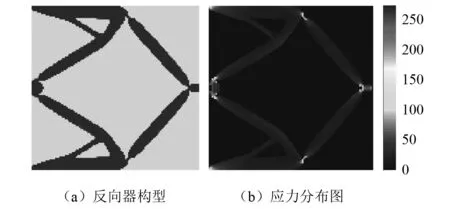
图6 无最小尺寸控制、有应力约束的反向器拓扑优化Fig.6 Topological design of inverter mechanism without minimum length scale control and with stress constraints
与无最小尺寸控制、无应力约束拓扑优化结果相比,无最小尺寸控制、有应力约束拓扑优化获得的反向器构型的最小特征尺寸有所变大,但是实相和空相的最小特征尺寸仍然过小,不易加工制造。机构的最大应力值为274.995 MPa,小于材料的屈服极限值,因此能够满足机构的静强度要求,并且应力分布更加均匀。
考虑最小尺寸控制和应力约束的混合约束拓扑优化获得的反向器构型的实相和空相材料结构能够满足最小尺寸要求,有效地避免细小几何特征的出现,有利于加工制造;结构的应力最大值为275.025 MPa,很好地满足应力约束,结构应力分布相对均匀,因此能够同时满足最小制造尺寸约束和静强度要求。由表1可知,与其他的三种拓扑优化模型优化结果相比,混合约束拓扑优化获得的柔性反向器的输出位移最小,由于最小尺寸控制和应力约束的混合约束在一定程度上限制了输出位移的最大化。反向器混合约束拓扑优化迭代过程中,初始阶段会出现应力约束违反现象,造成一些波动,总体迭代过程平稳,如图8所示。
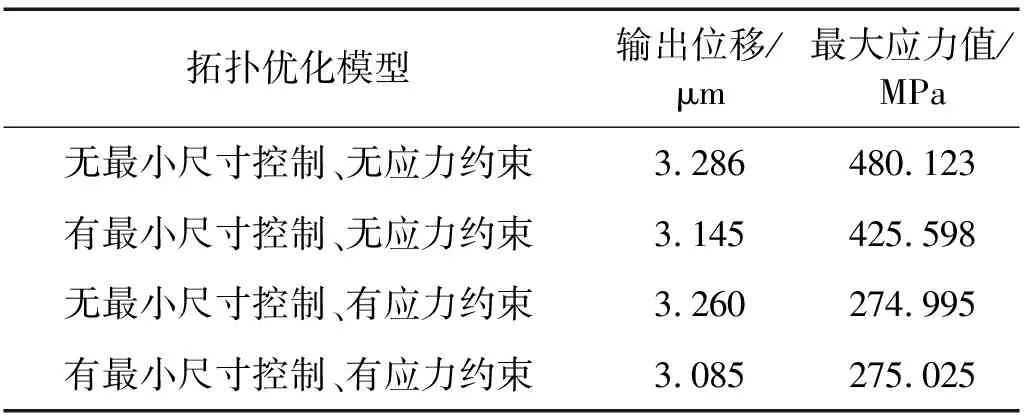
表1 不同优化模型的反向器拓扑优化结果
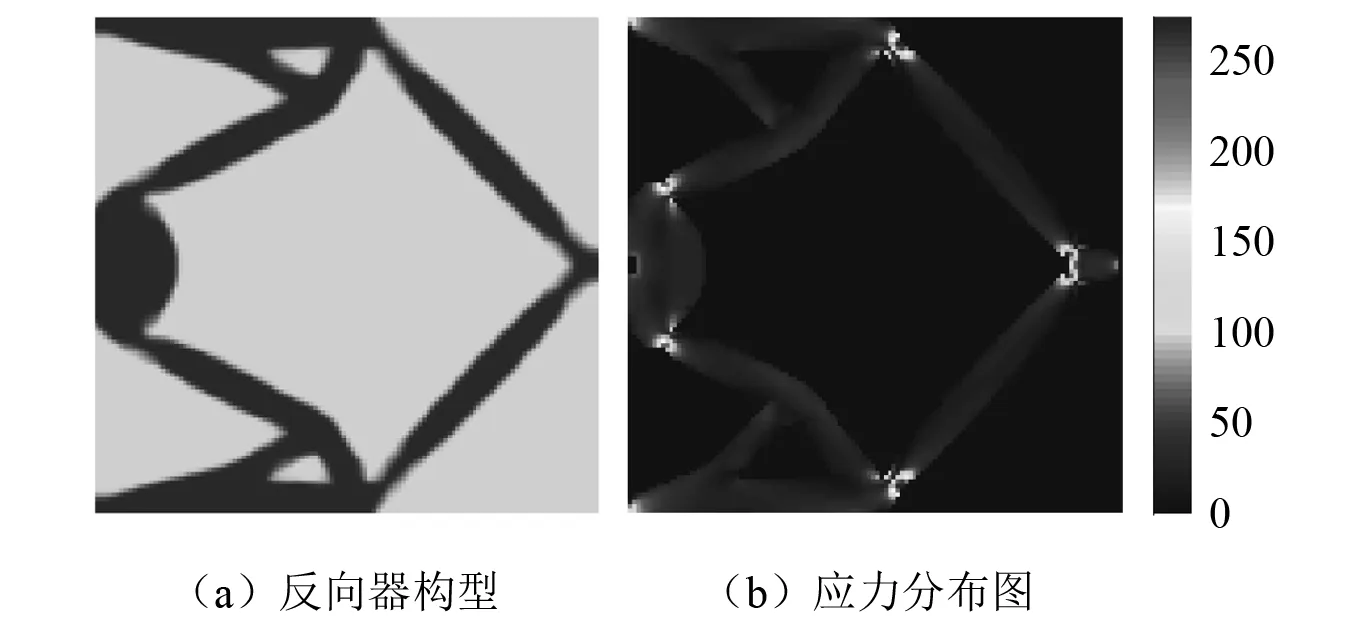
图7 有最小尺寸控制、有应力约束的反向器拓扑优化Fig.7 Topological design of inverter mechanism with minimum length scale control and with stress constraints
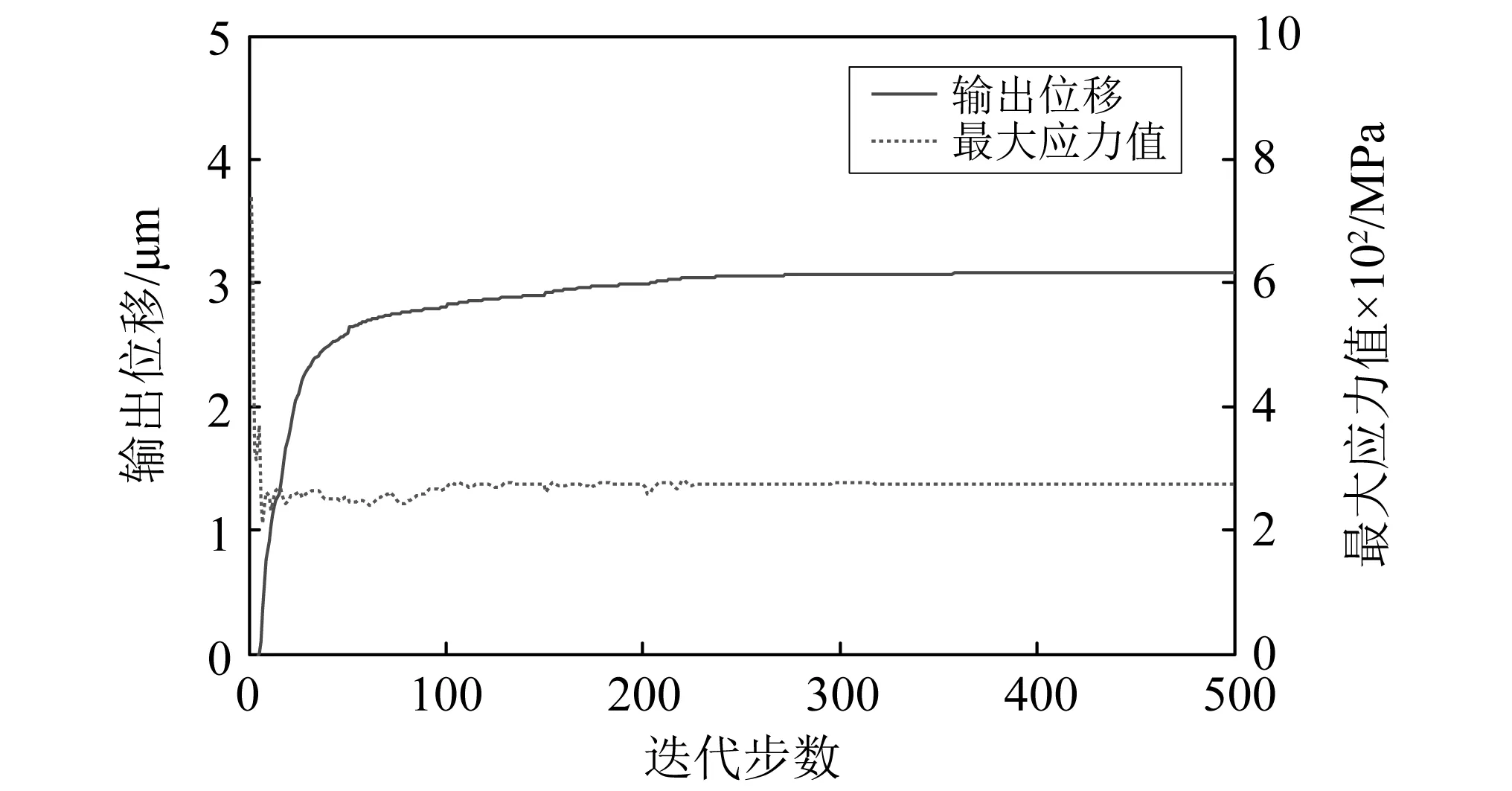
图8 考虑混合约束的反向器拓扑优化迭代过程Fig.8 Iteration history for topology optimization of inverter mechanism with hybrid constraints
3.2 柔性咬合机构
图9表示柔性咬合机构的设计域、固定边界、输入作用载荷以及输出位移方向。设计域尺寸L×L为120 μm×120 μm,左上端和左下端为固定边界,作用载荷F的大小为1.2×103μN,施加在右上端和右下端,左端中点为输出端。输入端刚度系数Kin和输出端刚度系数Kout分别为2.5×103N/m和1.5×102N/m,允许的体积份数f*=0.20。同样,由于咬合机构结构具有对称性,取其一半进行设计,将设计域离散成120×60个四节点单元。
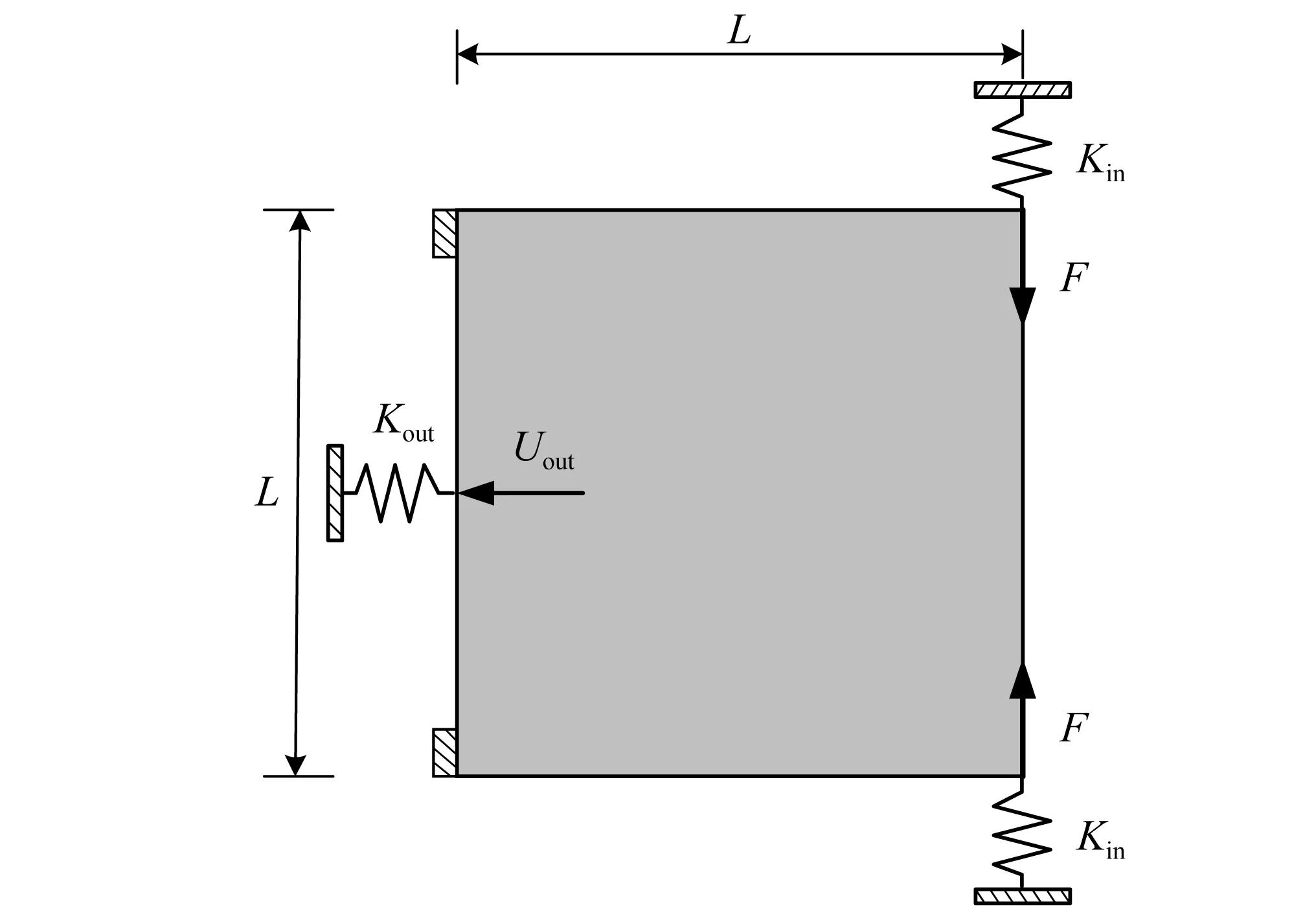
图9 咬合机构设计域Fig.9 Design domain for crunching mechanism

图10 无最小尺寸控制、无应力约束的咬合机构拓扑优化Fig.10 Topological design of crunching mechanism without minimum length scale control and without stress constraints
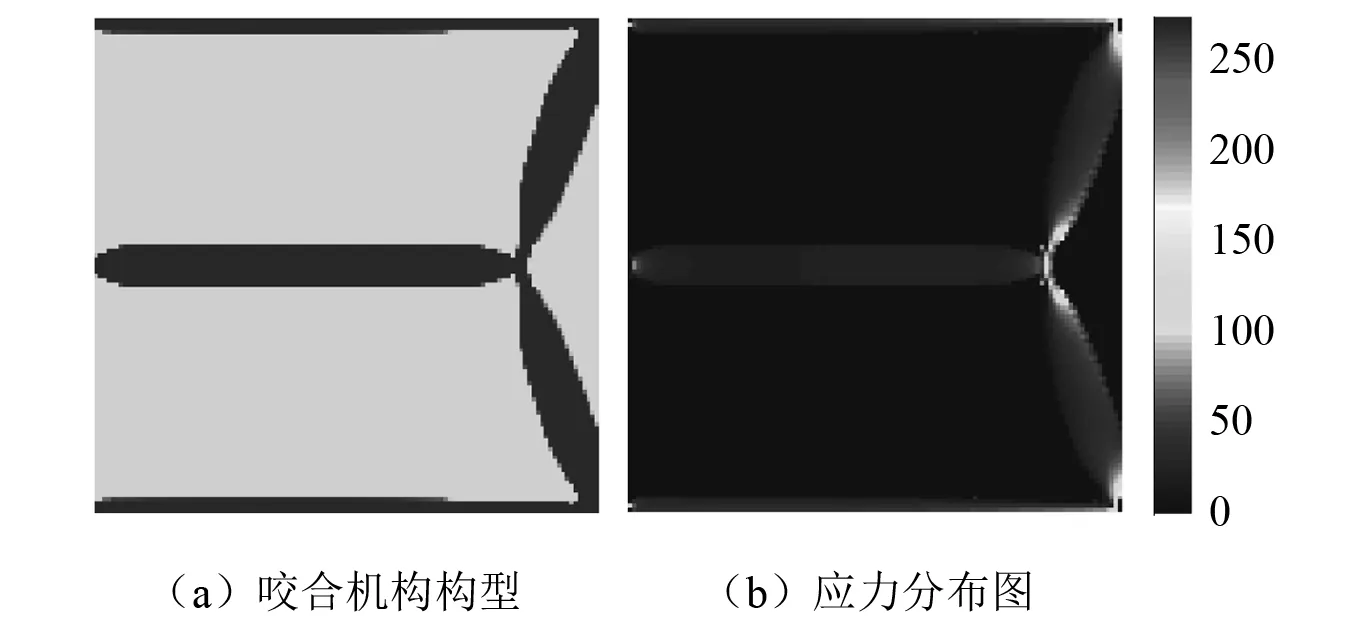
图12 无最小尺寸控制、有应力约束的咬合机构拓扑优化Fig.12 Topological design of crunching mechanism without minimum length scale control and with stress constraints
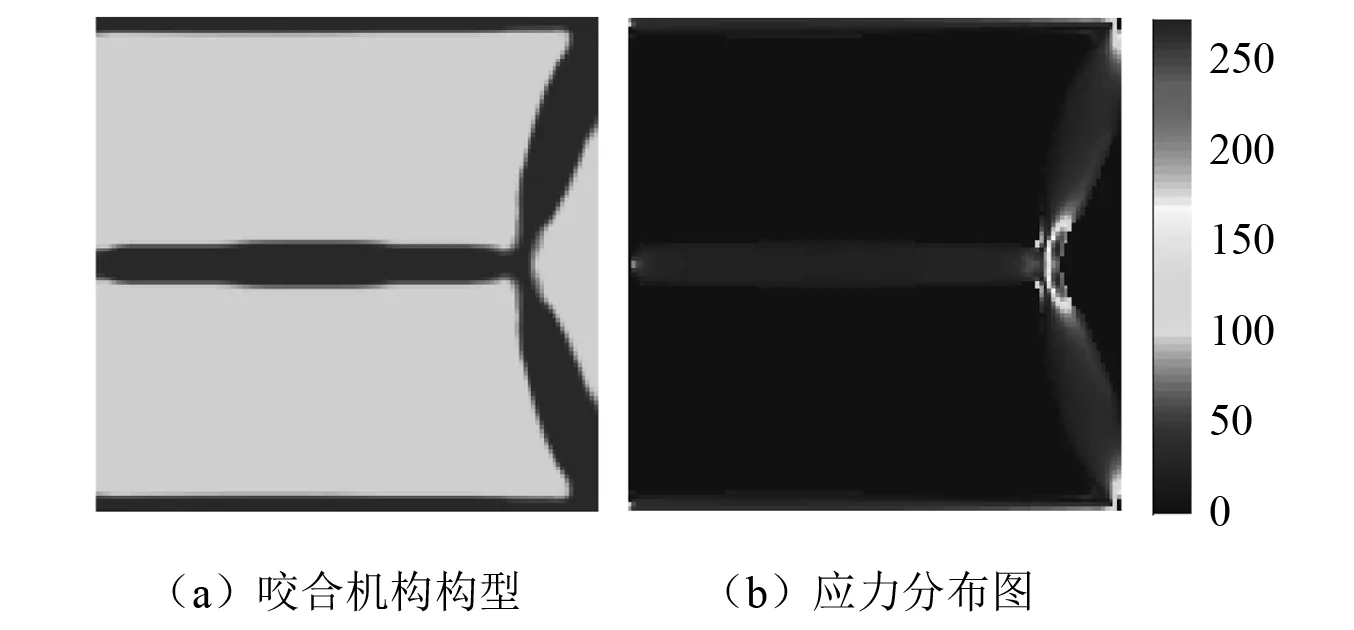
图13 有最小尺寸控制、有应力约束的咬合机构拓扑优化Fig.13 Topological design of crunching mechanism with minimum length scale control and with stress constraints
混合约束拓扑优化获得的咬合机构构型的实相和空相材料结构能够满足最小尺寸要求,有利于加工制造;最大值的应力为274.961 MPa,能够很好地满足应力约束,结构的应力分布相对均匀,因此机构构型能够同时满足最小尺寸制造约束和静强度要求。由表2可知,与其他的三种拓扑优化模型优化结果相比,混合约束拓扑优化获得的柔性咬合机构的输出位移最小,由于混合约束在一定程度上限制了输出位移的最大化。咬合机构混合约束拓扑优化设计迭代过程中,同样初始阶段会出现应力约束违反现象,造成一些波动,总体迭代过程平稳,如图14所示。
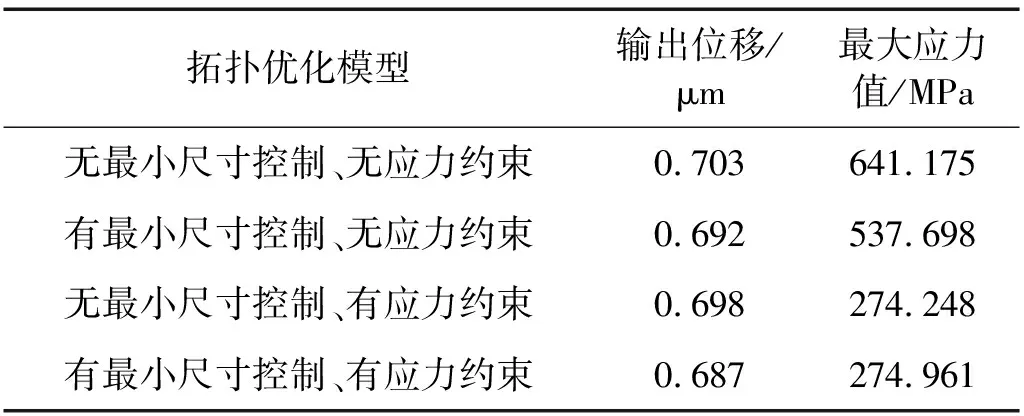
表2 不同优化模型的咬合机构拓扑优化结果
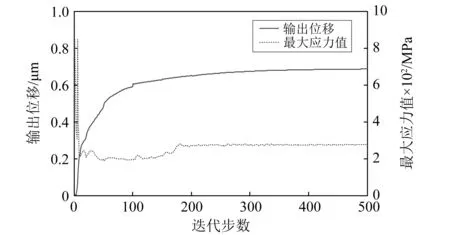
图14 考虑混合约束的咬合机构拓扑优化迭代过程Fig.14 Iteration history for topology optimization of crunching mechanism with hybrid constraints
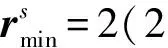
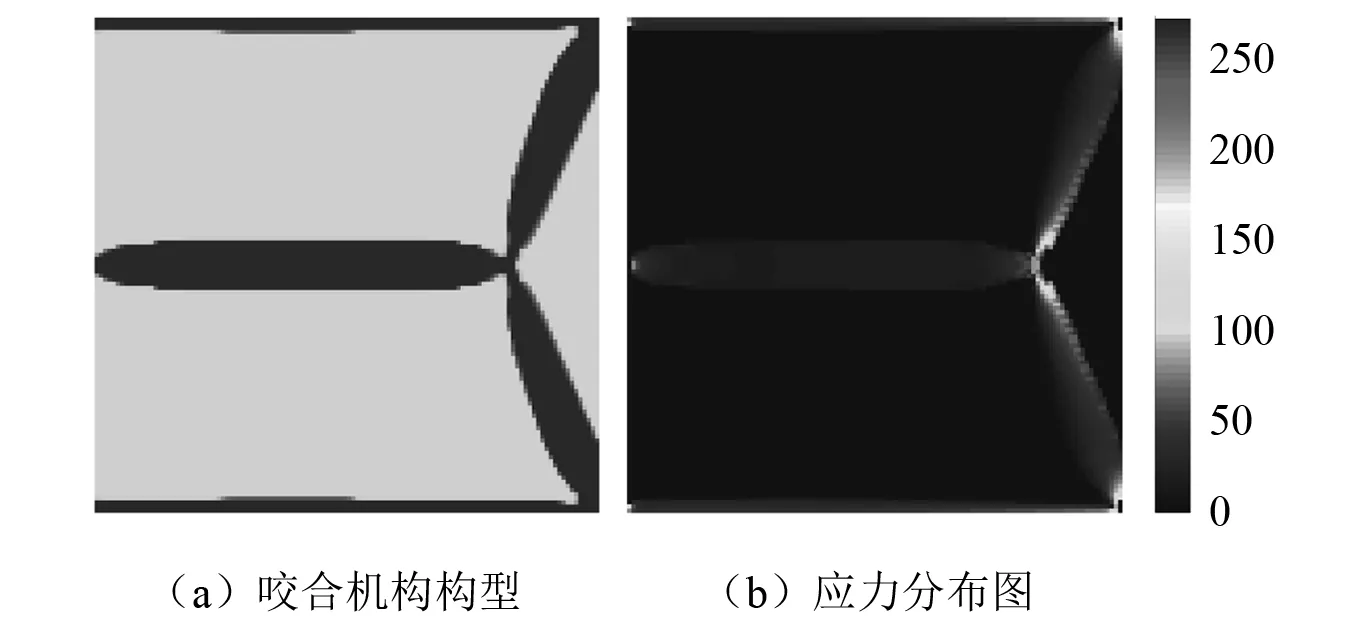
图15 咬合机构混合约束拓扑优化设计Fig.15 Topological design of crunching mechanism with hybrid
图16 咬合机构混合约束拓扑优化设计Fig.16 Topological design of crunching mechanism with hybrid
4 结 论
(1)采用多相映射方法控制实体相和空洞相材料结构的最小尺寸,将P范数对所有单元局部应力约束进行最大近似处理,转化为全局的应力约束,实现了综合考虑最小尺寸空和应力约束的柔顺机构混合约束拓扑优化设计。
(2)比较无应力约束条件下的有、无最小尺寸控制拓扑优化结果,最小尺寸控制拓扑优化获得的柔顺机构构型的实相和空相材料结构能够满足最小尺寸要求,并且可以在一定程度减少机构结构的应力水平。
(3)比较无最小尺寸控制条件下的有、无应力约束拓扑优化结果,有应力约束拓扑优化获得的柔顺机构构型的最小特征尺寸有所变大,但最小尺寸仍然过小,不易加工制造;能够满足静强度要求。
(4)与其他的三种拓扑优化模型优化结果相比,混合约束拓扑优化获得的柔顺机构能够同时满足最小尺寸制造约束和静强度要求,机构的von Mises等效应力分布更加均匀,但是混合约束使柔顺机构的输出位移有所减小。
猜你喜欢
波谱学杂志(2022年1期)2022-03-15
China’s foreign Trade(2021年6期)2021-12-26
安阳工学院学报(2020年4期)2020-09-11
中国校外教育(下旬)(2017年8期)2017-10-30
汽车与新动力(2017年3期)2017-06-29
小学阅读指南·低年级版(2017年1期)2017-03-13
中华奇石(2015年7期)2015-07-09
中华奇石(2015年5期)2015-07-09
人生十六七(2015年6期)2015-02-28
计算机辅助工程(2012年5期)2012-11-21
