基于无人机倾斜摄影测量的矿产储量动态监测
2022-02-28 08:30周吕李青逊权菲何永红陈宣羽李昕韦帮定
科学技术与工程 2022年5期
周吕, 李青逊, 权菲, 何永红, 陈宣羽, 李昕, 韦帮定
(1. 桂林理工大学测绘地理信息学院, 桂林 541004; 2. 桂林理工大学广西空间信息与测绘重点实验室, 桂林 541004; 3. 湖南科技学院土木与环境工程学院, 永州 425199; 4. 广西壮族自治区自然资源信息中心, 南宁 530028; 5. 长安大学地质工程与测绘学院, 西安 710054)
目前,露天矿山的开发存在多地区小规模、管理监测手段落后和缺乏基础数据支持等问题,针对此类管理问题,一种基于高新技术手段的矿产资源储量管理制度应运而生[1-2]。其依据统一规定的技术、标准和要求,定期对矿区的资源占用量进行监测、核算和管理,主要目的是监测正在开采的矿区资源变化,实时了解其资源储量变化因素,对矿产资源的合理保护与开发提供科学的数据支持,实现资源的最有效利用。此外,矿区储量管理对象是在矿产资源开发阶段的开采量和资源储量,对二者的监测管理是矿政管理的重要组成部分[3]。矿区的资源储量作为露天矿生产和管理的基础组成部分,利用测绘技术对其进行动态监测是实时、快速地掌握矿山开采、盈利和资源储量状况重要手段。
当前,矿产资源储量动态监测的方法主要有全球定位系统-实时动态定位(global positioning system-real time kinematic,GPS-RTK)结合全站仪测量系统、三维激光扫描技术、遥感(remote sensing,RS)技术和数字化三维模型储量计算4种方法。
(1)GPS-RTK结合全站仪测量系统。此技术通过测定矿山界址点的具体位置,综合考虑矿山的具体形状采用等高线法、开采块段法和断面法对矿产资源储量进行估算分析,此方法作业精度高,但内业处理繁杂,易受地形因素影响,存在成本投入高、缺乏安全保障和效率低等难以弥补的劣势[4]。
(2)三维激光扫描技术。其通过大面积的激光扫描获取地表三维坐标数据,经过内业处理可快速建立地表三维模型。但由于其大面积获取地表数据,导致其数据量较大而引起数据冗余。
(3)RS技术。该技术基于遥感影像提取矿区信息用于矿产资源储量的动态监测。遥感图像所带来全面性在矿产资源储量监测方面有着不可替代的作用,但由于遥感影像成本较高、影像精度较低和时效性较差等,目前该技术在矿产资源储量的监测应用较少。
(4)数字化三维模型储量计算。其一般基于数据库,采用数字化、可视化等空间信息技术完成矿产资源储量监测[5],伴随的无人机技术的广泛应用,目前该技术主要通过无人机为搭载平台,搭载多个传感器获取研究区域倾斜影像,进而建立矿区三维模型、生成数字高程模型(digital elevation model, DEM)和数字表面模型(digital surface model, DSM),经过空间分析计算矿产储量,最终得出矿区动用储量[6]。
矿山的开发通常伴随着地形复杂、环境恶劣等情况,传统的GPS-RTK结合全站仪测量系统难以在此类环境下完成监测,而三维激光扫描技术和RS技术由于其自身的限制因素,在实际的项目中难以得到有效的应用。无人机技术依据其低成本、灵活和效率高等优点,可克服矿区开采的各类复杂环境,且可以非接触的手段高精度地构建矿区三维模型并生产DSM,为数字化三维模型储量计算提供新的应用前景。
基于矿产资源储量监测的必要性,综合考虑各储量估算方法的优劣性,现以广西东兴市江平镇和马路镇两处露天矿作为研究区域,采用低空无人机倾斜摄影测量技术,以数字化三维模型储量计算方法为主要研究方法,实现基于无人机倾斜摄影测量技术的矿产资源储量动态监测。首先分别获取马路镇1 070张和江平镇918张无人机影像作为数据源;其次借助Context Capture无人机专业软件处理影像,分别获得两处露天矿区三维模型和DSM,对精度符合规范要求的三维模型利用Context Capture Viewer进行下一步的矿区动用储量计算,对DSM利用ArcGIS提取高程点,采用数字地面模型(digital terrain model,DTM)法进行矿产储量计算,最后对两种方法所获得的结果进行精度对比分析为矿政管理和矿产资源的有效开发利用提供科学的数据支撑。
1 无人机倾斜摄影技术
1.1 无人机倾斜摄影测量原理
无人机倾斜摄影是基于传统倾斜摄影的基本原理,结合计算机技术、影像密集匹配和特征提取等技术构建研究区域三维模型等成果[7]。其由无人机为主体的航测系统搭载高空拍摄、遥控遥测、视频影像微波传输等不同形式与功能的传感器组成[8],目前大多数搭载垂直正摄、前视、后视、左视、右视5个方位的航测相机进行数据采集工作。航测系统按照所设定的航线,依据不同倾斜角度的航摄像机获取研究区域地表地物完整的位置和姿态信息,同时根据GPS和惯导系统自动记录影像的POS信息。航向重叠和旁向重叠达到66.7%以上、POS信息完整的情况下便可借助无人机专业处理软件进行处理分析[9],构建实景三维模型、DSM等成果,可直接提取研究区域地表信息,结合外业测量的地表数据,合理地控制误差以便用于实际的生产。其关键技术如下。
(1)多视影像联合平差。多视影像联合平差是基于无人机倾斜摄影测量技术所获取的多视角影像所提出的一种平差方法,通过此技术最终解算每张影像的外方位元素以及加密点的物方坐标。通过航测系统获取的倾斜影像,解决了由于相机倾角问题存在的遮挡、尺度变形和几何变形等问题,如另一张影像上不存在同名点或者一个点对应多个点等[10-11],极大地减少了影像盲区特征构建。
(2)多视影像密集匹配。作为倾斜摄影测量技术的核心问题之一,多视影像密集匹配技术以多视影像联合平差得到的精确的外方位元素等作为基础数据进行影像密集匹配,其所提取特征点的综合平差结果将直接影响空中三角测量精度[12]。当前通常会采用多基元等技术,尽可能地利用多幅影像上的冗余信息进行多视影像密集匹配,避免遮挡对影像密集匹配的影响,纠正错误匹配信息;同时采用并行算法来提高运算速度,以此来获取多视影像上的同名点坐标。
(3)构建不规则三角网与地物纹理映射。理论上,每一个地物都可以通过三角网来构建其模型,三角网中三角形的大小、密集程度与影像的重叠度、地物复杂程度相关,重叠度越高,生成的三角网越复杂越密集;反之则简单稀疏。地物越复杂,则需要越复杂越密集的三角网来构建。目前主要利用多视影像密集匹配所获取的点云数据构建不规则三角网,生产时三角网格的内部规格需要调整为相同的分辨率,以更好地匹配影像的数据,同时需优化地物简单区域,以减少不必要的数据,提高三维建模的效率,最后生成不规则三角网模型矢量架构[13],最后将影像上的点对应的颜色值或灰度值等纹理信息映射到三维模型表面,得到符合真实色彩视觉效果的三维模型。
1.2 技术流程
无人机倾斜摄影测量技术在矿产资源储量动态监测中的技术流程主要分为采集数据源、数据整理、数据处理构建三维模型和矿区储量监测4个部分。
(1)采集数据源主要分为采集研究区域无人机倾斜影像和地面像控点。
(2)数据整理包括无人机影像和POS数据的整理。外业作业结束时,需及时导出数据源并检查影像和POS的完整性。
(3)数据处理由空中三角测量、构建不规则三角网、纹理映射等组成,最后生产DSM、三维模型等产品。
(4)矿区储量动态监测主要由ArcGIS基于DSM提取高程点和采用Context Capture Viewer基于三维模型自定义标高进行矿区的矿产储量计算,如图1所示。
2 研究区概况与数据源获取
2.1 研究区概况
选取了广西东兴江平镇(简称江平矿)和马路镇(简称马路矿)两处露天矿区作为研究区域,采用低空无人机倾斜摄影测量技术获取研究区域数据源生产矿区三维模型、DSM等成果,进行矿区动用储量估算。
2.1.1 江平矿
江平矿位于江平江以南1 000 m左右,矿区地理坐标为东经:108°05′18″~108°05′36″,北纬:21°37′55″~21°38′12″;矿区属于露天开采,矿区总面积约为124 797 m2,矿区总范围周长约为1 200 m;矿区资源分布均匀,地貌简单,通过计算矿区地表体积变化进行矿区动用储量估算。
2.1.2 马路矿
马路矿位于马路镇以南750 m左右,矿区地理坐标为东经:107°56′58″~107°57′08″,北纬:21°39′29″~21°39′34″;矿区属于露天开采,矿区总面积约为43 048 m2,总范围周长约为727 m;矿产资源在该区域分布均匀,地貌简单适宜采用低空无人机倾斜摄影技术计算其地表体积变化从而估算其储量动态变化。
2.2 数据源获取
数据源的获取分为无人机平台采集影像和GPS-RTK量测地面像控点两方面工作。前者获取自带坐标信息的影像用于后续生产DSM、三维模型等相关产品,后者获取地面像控的三维点位信息用于数据处理的空中三角测量,提高空中三角测量通过率的同时可以提高模型精度。外业工作依据预设方案进行数据源采集,根据数据成果对地面分辨率的要求确定航高,进而完成数据源采集的航线规划设计等任务。其中,相对航高计算公式为

(1)
式(1)中:H为飞行相对航高;GSD为地面分辨率;a为像元大小;f为传感器焦距。由于模型精度与GSD存在反比关系,而根据式(1)可知,GSD越大则航高越高,从而可以得到航高越低所获得的模型精度越高[10]。
综合飞行所需时间、研究区域地表起伏和设计规范,借助大疆无人机获取分辨率范围为0.7~9.1 cm的江平矿影像和分辨率范围为1.0~7.4 cm的马路矿影像;此外采用GPS-RTK对研究区域采集像控点数据;精度要求为:点位误差±3.0 cm,高程中误差±5.0 cm,获取江平矿和马路矿像控点的点位位置如图2所示。基于上述,对江平矿获取918张倾斜影像和5个地面像控点;对马路矿获取1 070张倾斜影像和4个地面像控点作为数据源。

图2 像控点位置图Fig.2 Location diagram of image control points
3 数据处理和结果分析
3.1 数据处理方法
矿产资源储量的动态监测关键在于能否准确表达矿区的储量与开采量,而无人机数据源的处理主要目的为得到矿区DSM、三维模型等成果[14]。选取自动化程度较高、无需人工干预,并且能高精度和高效率地生产相应成果的Context Capture无人机专业处理软件作为数据处理工具,基于同一服务器生产江平矿和马路矿DSM、三维模型等成果。此外, 采用Context Capture Viewer作为三维模型预览工具和计算载体,计算研究区域资源储量变化,相关研究表明方格网大小为4.5 m和5.0 m时,所计算得出的矿产储量误差最小[15]; 采用ArcGIS基于DSM,经过重采样、栅格转点、导出高程点,最后使用南方CASS进行DTM矿产储量计算。综上所述,基于江平矿和马路矿三维模型和DSM,结合精度分析结果,采用Context Capture Viewer计算矿产资源储量和ArcGIS提取高程点计算矿区动用储量两种方法计算二者地表矿产储量变化,最后得出研究区域的储量变化。
3.1.1 导入数据
数据处理新建工程之后,选择导入整个影像所在文件夹目录,检查影像是否能全部打开,为下一步的空中三角测量做准备。
3.1.2 空中三角测量
空中三角测量主要目的是确定影像之间的相对位置关系并生成地面加密点,数据处理需要进行自动和手动空中三角测量。其中自动指的是软件在空中三角测量时自动计算影像之间的相对位置并生成地面加密点;手动指的是需要进行像控点的刺点操作,以提高空中三角测量的精度和通过率。
对江平矿和马路矿分别进行空中三角测量,在第一次空中三角测量之后,软件可计算影像的位置信息,便于下一步的刺点工作;利用影像的位置信息可进行精细刺点并提交第二次空中三角测量[16]。空中三角测量结束后,需在3D视图中检查加密点的位置是否出现偏移、影像位置是否分层和结果有无错乱等情况。经检查,江平矿和马路矿的空中三角测量中影像均参与重建并且影像信息完整,结果符合原始地形地貌情况,且未出现错乱分层等情况,基于上述结果,可进行下一步的三维重建、DSM生产等操作。
3.1.3 生产数字产品
经空中三角测量生成地面加密点之后,即可构建矿区的实景三维模型。Context Capture在此过程中首先会根据空中三角测量结果对地面加密点进行运算得到不规则的三角网,进而生成初步无纹理信息的三维三角网表面模型,然后通过无人机影像中的纹理信息映射于无纹理信息的三维三角网表面模型,最后生成高可视化的实景三维模型。根据矿区地形地貌结合服务器性能将江平矿和马路矿分为若干个瓦片进行生产,经Context Capture自动对矿区进行纹理映射之后,分别得到江平矿和马路矿高精度DSM、真实视觉效果的三维模型,如图3所示。

图3 三维模型图Fig.3 3D model diagram
3.2 成果精度评价
基于江平矿和马路矿的DSM、实景三维模型,采用GPS-RTK实测像控点坐标近似作为精度评价的真值,与此次成果中的像控点坐标对比求差,最后
计算中误差对此次的数字产品进行精度评价。误差公式为

(2)
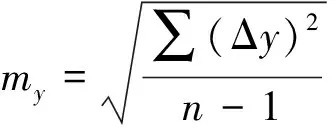
(3)
(4)
式中:n为像控点个数;mx为x方向的中误差;my为y方向的中误差;m为平面中误差;Δx和Δy分别为x方向的真误差和y方向的真误差。其中式(2)和式(3)利用所有像控点的真误差进行平方求和计算,最终可代表此次像控点精度可靠性。至此,分别选取江平矿5个像控点和马路矿4个像控点作为精度评价检查点,利用中误差的特性,可得如表1所示的三维模型检查点精度统计。
基于表1检查点统计结果,结合中误差的特性分析江平矿和马路矿平面精度、高程精度。江平矿精度分析结果:x方向最大误差为2.3 cm,中误差为1.8 cm;y方向最大误差为1.9 cm,中误差为1.3 cm;平面最大误差为3.0 cm,最小误差为0.2 cm,中误差为2.2 cm;z方向最大误差为3.3 cm,中误差为3.0 cm。
马路矿精度分析结果:x方向最大误差为2.1 cm,中误差为2.1 cm;y方向最大误差为1.6 cm,中误差为1.3 cm;平面最大误差为2.4 cm,最小误差为1.9 cm,中误差为2.5 cm;z方向最大误差为3.7 cm,中误差为3.5 cm。至此表明,江平矿与马路矿所生产的相关产品完全符合规范要求,可用于矿区矿产储量计算。
4 矿区矿产储量计算与分析
4.1 Context Capture Viewer矿区动用储量计算
经数据处理与精度评价获取江平矿和马路矿的三维模型,基于此结果采用Context Capture Viewer选取研究区域进行计算。由于矿区处于开采中,矿产动用储量所计算的净填方量即为动用储量。

表1 三维模型检查点精度统计Table 1 3D model checkpoint accuracy statistics
选取江平矿和马路矿已开采范围周长分别为1 200.8 m和727.4 m,平场面积分别为95 605.9 m2、37 467.0 m2,分别设定自定义标高75.0 m和105.0 m,采样距离均为5.0 m,计算结果如图4所示。通过计算可知江平矿和马路矿测区填方量分别为2 215 342.1 m3和927 026.7 m3,挖方量分别为824 898.0 m3和69 715.8 m3,此时可得净填方量分别为1 390 444.1 m3和857 310.9 m3,即以此方法计算江平矿和马路矿的开采量分别为1 390 444.1 m3和857 310.9 m3。

图4 矿区动用储量计算图Fig.4 Calculation diagram of working reserves in mining area
4.2 DTM矿产储量计算
基于3.2节的精度评价与分析,对研究区域所进行生产的DSM精度符合规范要求,以此提取高程点用于矿区矿产储量的估算符合规范要求。首先通过ArcGIS的数据管理工具对所生产的DSM进行重采样设置高程点密度为:x方向8.9 m,y方向8.3 m;其次利用转换工具将数据格式由栅格输出为点;最后添加属性表字段,输出为CAD格式即可进行下一步的矿产储量估算。由于DTM法计算矿产储量可以在很大程度上忽略地形的限制,结合此次研究区域为露天矿区,故采用DTM法对研究区域提取的高程点进行矿产储量计算,其根据已有的坐标和高程点数据,根据所设定的标高和范围,通过构建范围线内的三角网模型,其次对每一个三角网区域进行矿区动用储量的计算,最后将每一个三角网内的填挖方进行叠加即可得到最终的填挖方结果。
通过设置与Context Capture Viewer矿区动用储量计算一致的参数,采样间隔设置为5.0 m,江平矿和马路矿的设计标高分别为75.0 m和105.0 m,计算结果如图5所示。经计算可知,江平矿和马路矿的平场面积分别为95 605.9 m2和37 467.0 m2,填方量分别为2 184 451.5 m3和906 621.9 m3,挖方量分别为702 641.1 m3和48 897.6 m3,可得其净填方量分别为1 481 810.4 m3和857 724.3 m3,表明以此方法计算可知江平矿和马路矿在各自阶段性的开采量分别为1 481 810.4 m3和857 724.3 m3。
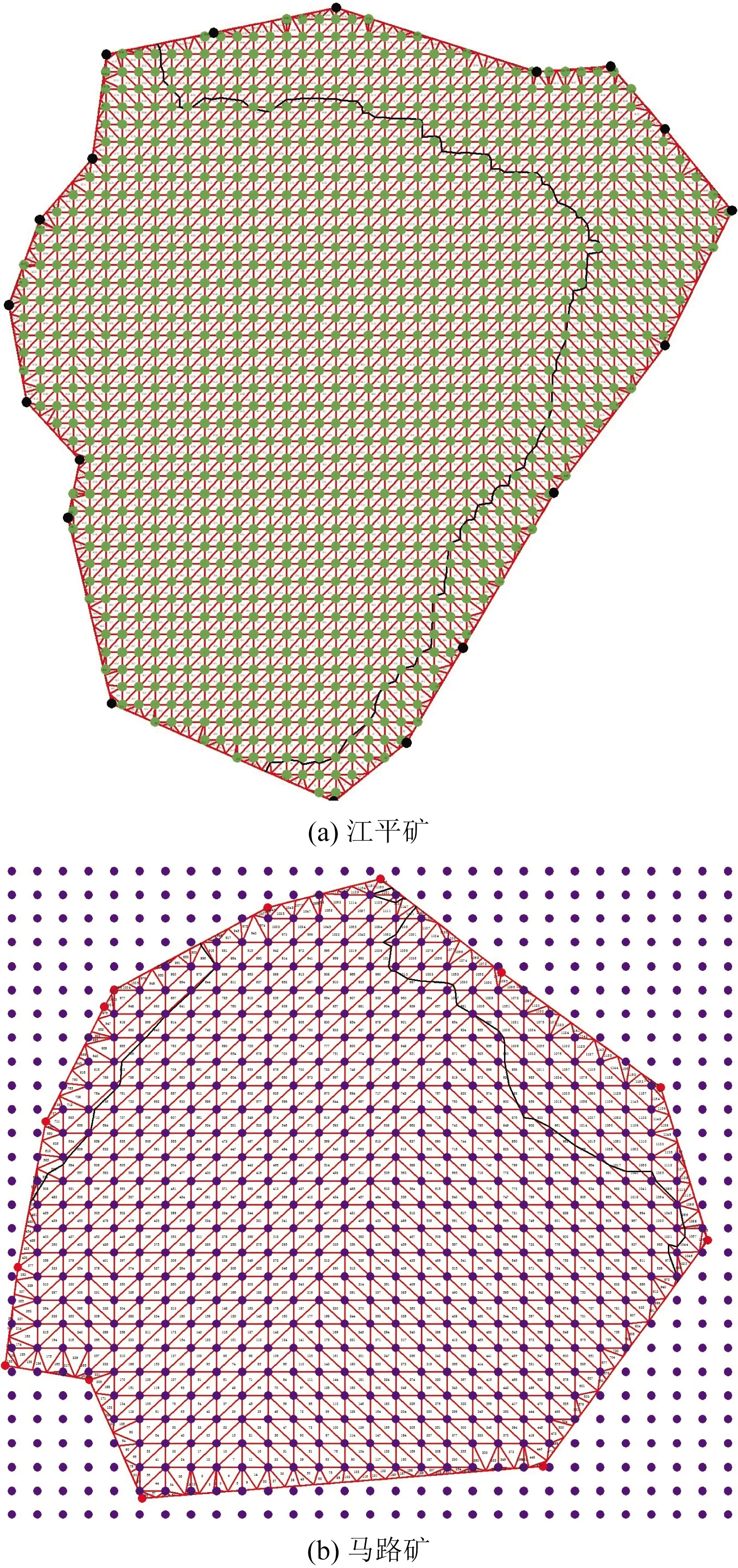
图5 DTM法矿区动用储量计算图Fig.5 Calculation diagram of DTM mining production reserves
4.3 矿产储量计算精度分析
为验证基于三维模型采用Context Capture Viewer直接量测露天矿的开采量的精度,实现低空无人机倾斜摄影测量技术在矿产资源储量动态监测中的应用,对比分析了DTM法和Context Capture Viewer直接量测两种方法的计算结果。表2为江平矿和马路矿以此两种方法计算结果的精度统计分析表,以DTM法计算结果为真值,差值为DTM法计算结果减去Context Capture Viewer直接量测的结果,差值百分比为差值除以真值。由表2可以得出,江平矿和马路矿的误差差值百分比分别为6.17%、0.05%,相对误差均满足要求,尤其是马路矿的相对误差更是优于1%。经实验分析,江平矿范围大,垂直落差达146 m,在高程点的提取应设置更小的间距,提取较为密集的高程点以便更好地反映矿区的地形地貌获得更加精确的结果。
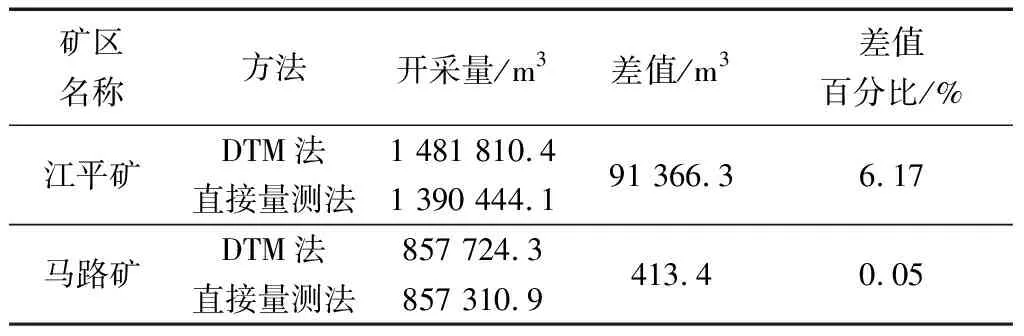
表2 矿产监测结果统计分析表Table 2 Statistical analysis of mineral monitoring results
5 结论
通过对江平矿和马路矿两处露天矿山采用低空无人机倾斜摄影测量技术,借助Context Capture进行数据处理获取两处矿区的DSM和三维模型,其中利用DSM提取的高程点进行DTM矿区动用储量计算和利用三维模型直接量测矿区的开采量两种方法,运用新兴技术与传统成熟技术结合的方法,实现对露天矿区的储量监测,得出以下结论。
(1)研究区域江平矿、马路矿三维模型x方向最大误差为2.3 cm和2.1 cm,中误差为1.8 cm和2.1 cm;y方向最大误差为1.9 cm和1.6 cm,中误差为1.3 cm和1.3 cm;平面最大误差为3.0 cm和2.4 cm,最小误差为0.2 cm和1.9 cm,中误差为2.2 cm和2.5 cm;z方向最大误差为3.3 cm和3.7 cm,中误差为3.0 cm和3.5 cm;至此可知,所选取的两处露天矿所构建的三维模型和DSM空间精度符合规范要求,此成果可用于矿产储量的动态监测。
(2)基本三维模型精度符合规范要求的情况下,经选取开采范围计算得到江平露天矿区动用储量为1 481 810.4 m3;马路露天矿区动用储量为857 724.3 m3。同时验证了基于三维模型可直接量测露天矿的开采量,其差值百分比均可满足生产需求,进一步实现了低空无人机倾斜摄影技术在露天矿山储量的动态监测,且该技术以低成本、快速、实时的优势,为有关部门的矿政管理提供科学的数据支撑。
猜你喜欢
湖北教育·综合资讯(2022年4期)2022-05-06
矿产勘查(2020年4期)2020-12-28
矿产勘查(2020年2期)2020-12-28
石油与天然气地质(2020年4期)2020-08-14
少儿美术(2019年2期)2019-12-14
中国矿业(2019年8期)2019-08-16
军事文摘·科学少年(2017年2期)2017-04-26
作文周刊·小学一年级版(2016年31期)2017-03-02
阅读与作文(小学低年级版)(2016年2期)2016-03-12
中国卫生(2014年6期)2014-11-10