MicroCT图像中周围神经束轮廓的建模
2022-03-01 01:03孙思语钟映春郑海阳
计算机仿真 2022年1期
孙思语,钟映春,郑海阳,戚 剑
(1. 广东工业大学自动化学院,广东 广州 510006;2. 中山大学附属第一医院显微外科,广东 广州 510080)
1 引言
周围神经的损伤是外科临床上的常见疾病[1][2]。在进行周围神经损伤的修复手术过程中,准确对接具有相同功能性质的神经束将在很大程度上恢复神经的传导和控制功能。神经束轮廓的建模可为对接具有相同功能性质的神经束提供关键的基准数据。这些数据可为周围神经修复手术提供定位基准,因此非常有必要构建神经束轮廓模型。
当前,对生物体组织进行建模的相关研究主要集中在肿瘤[3][4]、心脏结构[5][6]和对图像的识别配准等相关领域[7]。在生物体组织轮廓的拟合研究方面,Mangayarkarasi Ramaiah等人[8]用直线段逼近数字平面曲线(CCA)的方法,但是没有构建数学模型,尚不能达到建模的要求。HuiLi等人[9]提出一种适合于密集连通轮廓的多重椭圆框架,具有较好的精度和效率。但该方法受到两个因素的限制:首先,由于滑动窗口的尺寸固定,导致轮廓中椭圆尺寸变化较大时不适用;其次,该框架不能区分内部椭圆和外部椭圆。Rajiv Kapoor等人[10]使用多项式曲线模型拟合虹膜轮廓,有效地实现了虹膜在任意距离和方向上的定位,但对虹膜轮廓的拟合效果没有作出说明。Miao Liao等人[11]使用瓶颈检测和椭圆模型,对显微图像中重叠细胞进行有效分割,但对单个细胞轮廓图像的拟合精度不高。
B样条模型是对目标物外形轮廓进行拟合的常用建模方法。Myungsoo Bae等人[12]基于三次B样条模型提出一种半自动检测牙弓形状的方法,该方法对逼近上、下颌牙弓形态具有较好的准确性。Yongchuan Liu等人[13]提出基于B样条模型的轮廓推衍方法,模拟肿瘤轮廓线在单个目标时相中的形变,极大地提高了肿瘤轮廓推衍精度和推衍速度。Zarrar Javaid等人[14]引入了一种新的融合方法,将一种轮廓插值和径向基函数融合,提出一种样条边界校正方法用于股骨、胫骨和髌骨软骨重建。目前,关于神经束轮廓建模的相关研究尚未见诸报道。
使用上述生物体组织轮廓建模方法对周围神经束轮廓建模将存在以下问题:
1)直线段逼近轮廓曲线和多项式曲线模型逼近轮廓曲线都不能明确构建周围神经束轮廓数学模型;
2)在周围神经中含有多个功能性质不同、直径不等的神经束。为了降低模型复杂度及后续的参数研究,需要使得每个周围神经束轮廓模型具有统一数量的阶数和参数。
为了能够构建周围神经MicroCT图像中非分裂/合并阶段的神经束轮廓的模型,本文将对B样条曲线模型改进,得到保证模型精度的情况下模型复杂度低的神经束轮廓模型。
2 神经束轮廓离散点数据集的构建
针对采集的周围神经标本,使用超高精度MicroCT扫描这些标本,获得DICOM图像。以第二个标本第10张扫描图像为例,如图1(a)所示。为了得到图像中神经束轮廓离散点数据集,采用前期研究的神经束区域自动获取算法[15][16],得到周围神经二值图像,再根据边界轮廓跟踪算法[17],遍历每个像素坐标,删除8个相邻方位全为255(白色)的像素点坐标,只保留每个神经束最外层轮廓像素坐标。如图1(b)所示,即为神经束轮廓图。将每个神经束轮廓像素坐标按照逆时针旋转一周的方向排序,得到18个维数不同的矩阵。每个矩阵的维数与对应神经束轮廓离散点的数量有关。


图1 神经束轮廓离散点数据集构建过程
3 神经束轮廓建模方法与评价指标
从图1(b)可见,神经束轮廓是一系列类圆封闭曲线。在探索对比诸多生物组织建模方法的基础上,本文采用3阶准均匀B样条曲线模型对神经束轮廓曲线进行建模。
3.1 神经束轮廓建模方法
B样条曲线的基函数次数与控制点数目无关,不仅具有模型简单的特点,而且可解决在描述复杂形状时的连接问题。k次B样条模型为

(1)
其中,Pi为控制点坐标,Ni,k(u)为k次规范B样条基函数。该基函数是一个k次分段多项式。通常采用cox-deboor的递推公式表示B样条基函数,定义如下
(2)

为了得到封闭曲线建模的结果,需要在每个轮廓数据集的末端添加两个控制点Pn+1=P1,Pn+2=P2使得曲线首尾相连。由于均匀B样条曲线模型在首末两端处形状难以控制,因此本文采用3阶准均匀B样条模型:
1)阶数的选取
当k=0时,0次B样条模型为控制点自身;当k=1时,1次B样条模型为多边形;当k取值越小,B样条模型越接近于控制点构成的多边形;当k越大时,B样条模型具备更好的连续性。因此取k=3,满足重复度为1(r=1)的节点处是C2连续的。
2)节点矢量的选取
为了满足节点处重复度为1(r=1),节点矢量ui必须取严格递增序列,在首末端点处取重复度k+1,此时有
u0=u1=…=uk;
un+1=un+2=…=un+k+1.
(3)

(4)
3)控制点数目的选取
在不限定控制点数目的情况下,选取数据集中全部的离散点作为控制点进行建模。此时,模型的参数/项数与控制点数目呈现线性相关,即控制点越多,模型的参数/项数越多。
由于神经束轮廓周长的像素不等,为了获得参数/项数的长度一致的描述模型,采用了限定控制点数目的方法,即对数据集进行等间距采样限定次数。若轮廓离散点数目不足可等距增加控制点,使增加的控制点坐标与前一个控制点坐标相同。
3.2 评价指标
3.2.1 控制点数目选取的指标:Dice系数
Dice系数是一种集合相似度度量函数[18],通常用于计算两个样本的相似度。这个指标是一个总体评价指标。因为神经束的实际轮廓与拟合的轮廓会存在一定的差异,本文从面积的角度将拟合轮廓所包围的区域B和实际轮廓所包围的区域A进行比较。其中SA表示神经束实际轮廓所包围的面积,SB表示拟合轮廓所包围的面积
(5)
从式(5)可见,Dice系数的值越大,拟合轮廓所包围的面积与神经束实际轮廓所包围的面积越相似。根据前述分析,模型会受到控制点数目的显著影响,因此在本文中,设定当Dice系数达到95%以上,认为此时的控制点数目均属于可选范围。其原因在于,当Dice系数达到95%时,也就是拟合轮廓所包围的面积与实际轮廓所包围的面积接近程度达到95%,已经达到高度近似,可在此条件下选取合适的控制点数目。
3.2.2 误差评价指标
豪斯多夫距离(Hausdorff Distance)是描述两组点集之间相似程度的一种度量指标[19]。
假设有两组点集DA={a1,a2,…,ap}和DB={b1,b2,…,bp},则这两个点集之间的豪斯多夫距离为
H(DA,DB)=max(h(DA,DB),h(DA,DB))
(6)

(7)

根据豪斯多夫距离,DB中的点br(r∈1,2,…,q)分别与DA中所有点(a1,a2,…,ap)求欧氏距离再取最小值,得到点br与原轮廓间的最短垂直距离即边界误差
(8)
再取这些边界误差里的最大值作为豪斯多夫距离
(9)
取平均值作为平均误差

(10)
令神经束轮廓离散点的数目为p,则相对误差为

(11)
此外,不同于算法复杂度的评价方式,评价模型的复杂度的依据是模型的阶数和参数/项数规模[20]。阶数高、参数/项数多的模型复杂度高,对实际情况的拟合程度自然就高,但是模型复杂度过高,很容易出现过拟合情况。反之,容易出现欠拟合情况。因此,在实践中通常是在满足拟合精度的情况下,选择尽量低的阶数、参数少的参数/项数,达到降低模型复杂度的目的。
4 实验结果与分析
4.1 实验环境配置
在本文中,构建神经束轮廓离散点数据集的软件平台为JetBrains PyCharm Community Edition 2018.2.4 x64,神经束轮廓建模研究处理软件平台为MATLAB(R2015b)。硬件平台为:CPU Inter Core i5,16G内存,500G硬盘。操作系统:Win10-64Bit。
4.2 实验结果与分析
在本文中,随机选取图1(b)中编号为6的神经束为例展示神经束轮廓的建模结果。从数据集中选取一张MicroCT扫描图像,再从其中分离得到编号为6的神经束轮廓数据共计253个。
4.2.1 实验一的结果与分析
采用3阶准均匀B样条模型拟合神经束轮廓。所有神经束轮廓的实际轮廓离散点数量不等,平均为167个离散点。将所有的神经束实际轮廓离散点作为控制点,拟合结果如图2所示。

图2 实验一的结果
从图2所示的实验结果来看,使用全部离散点作控制点的拟合轮廓与神经束实际轮廓几乎完全重叠。该方法的不足在于,由于每个神经束实际轮廓的离散点数量并不相同,使得模型的控制点数量不同,进而导致无法采用统一数量的控制点拟合众多的神经束轮廓。如果每个神经束轮廓都用一个独立的模型拟合,将导致模型的参数/项数显著增加,使得模型的复杂度显著上升。
4.2.2 实验二的结果与分析
在实验一的基础上,限定控制点数目(N)分别为15、25等两种情况,采用等距采样法对神经束轮廓离散点数据集进行采样,并采用3阶准均匀B样条模型拟合神经束轮廓,结果如图3所示。

图3 实验二的结果
从图3所示的实验结果来看,建模的结果与神经束实际轮廓存在一定的误差,并且随着限定的控制点数目的增加,这种差异会逐步减小。这说明,该方法是完全可行的。另外,控制点数目会显著影响描述的精度,可以通过改变控制点数目来获得所需要的建模精度。
4.2.3 实验三的结果与分析
在实验二的基础上,为了探索控制点数目与建模效果的相关性,本文以Dice系数作为因变量,以控制点数目为自变量,进行相关性实验。随机选取编号为6、11、16、17等4根神经束为例进行相关性实验结果展示,如图4所示。

图4 实验三的结果
从图4所示的实验结果来看,以Dice系数为因变量、以控制点数目为自变量作出的曲线,与图3中展示的结果相互印证。这说明本文选择Dice系数作为建模效果的评价准则是合理的。其次,当控制点数目少于15时,Dice系数跟随控制点数目单调递增。当控制点数目超过21时,所有的神经束轮廓模型的Dice系数都同时大于95%。因此,可以选定控制点数目为21个作为合适的控制点数目,以便在保证建模精度的情况下降低模型的复杂度。第三,控制点数目在少于20时,可以通过控制点数目影响建模精度。当控制点数目多于20时,模型精度进入稳态,几乎不受控制点数目影响。
4.2.4 实验四的结果与分析
根据实验三的结果,选择控制点数目为21个,可使所有神经束轮廓建模的Dice系数达到95%以上,给出所有神经束实际轮廓的建模效果情况,结果如图5所示。为了准确度量模型的误差,以豪斯多夫距离为误差评价指标,以连续10张扫描图像中的神经束轮廓为基数,求取了每个神经束轮廓模型误差最大值、平均值和相对误差,结果如表1所示。
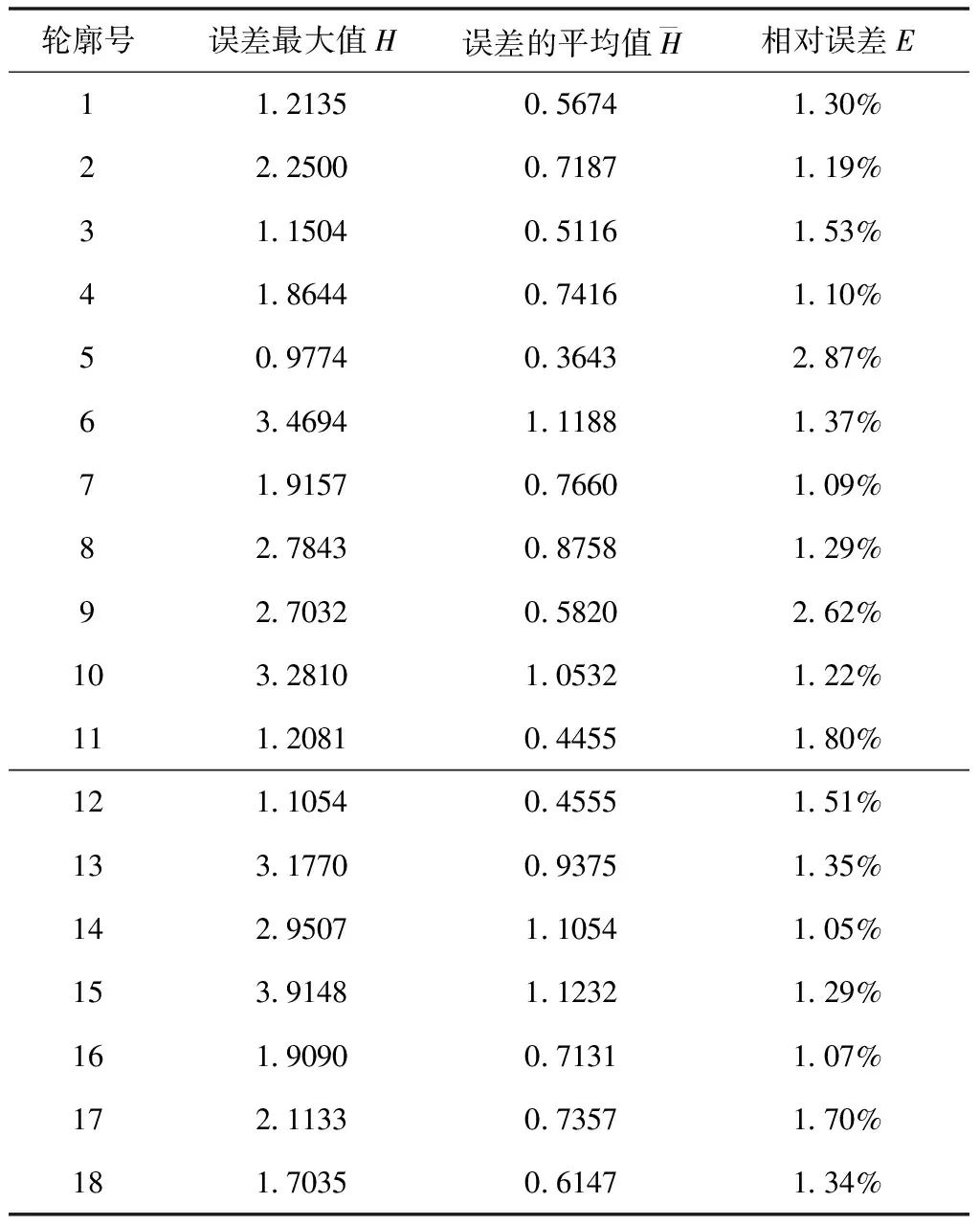
表1 实验四的结果误差(单位:像素)

图5 实验四的结果
从图5和表1所示的实验四结果来看,在神经扫描的单位长度内,模型的豪斯多夫距离误差最大值少于4个像素,相对误差均低于3%,即从神经束轮廓的模型误差角度来看,本文方法的建模结果令人满意。
5 结论
定量描述神经束轮廓可以为精确度量神经束间距、对接具有相同功能性质的神经束提供核心数据。这些数据可为周围神经修复手术提供定位基准。为此,在构建神经束轮廓离散点数据集的基础上,本文提出采用等间距采样与3阶准均匀B样条方法相结合的方法,对周围神经MicroCT图像中非分裂/合并阶段的神经束轮廓进行建模。并以Dice系数为准则,探索合适的模型控制点数目;以豪斯多夫距离作为误差评价指标,评价建模的精度。
实验结果表明:1)以本文方法对神经束轮廓建模,可在具有较高模型精度的情况下具有较低的模型复杂度。相比于实验一模型,模型复杂度下降了87%;2)当控制点数目较少时,控制点数目可显著影响模型精度。当控制点数目达到一定数值后,模型精度会进入稳态,Dice系数始终大于95%。
接下来,将探索模型参数的统计规律。
猜你喜欢
华文教学与研究(2022年1期)2022-04-27
社会科学战线(2022年2期)2022-03-16
科技信息·学术版(2022年3期)2022-02-21
小猕猴智力画刊(2021年6期)2021-08-05
思维与智慧·下半月(2021年3期)2021-03-25
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
华东师范大学学报(自然科学版)(2019年2期)2019-06-11
科学与财富(2016年26期)2016-12-01
企业导报(2016年20期)2016-11-05
作文大王·低年级(2016年3期)2016-03-11