
基于Ansys的高空作业平台自振频率影响因素研究
2022-03-06 08:40夏勇
起重运输机械 2022年24期
夏 勇
南京高精齿轮集团有限公司 南京 221000
0 引言
随着我国建筑业的快速发展及城镇化进程的大力推进,高空作业平台的广泛应用大大降低了工人劳动强度,提高了工作效率,在城市电力、市政建设、港口货运、建筑维修、外墙清洗等业务中优势越来越明显,有着广阔的发展前景[1]。高空作业平台是一种用特制钢丝绳从建筑物上,由悬挂机构在提升机的作用下使悬挂平台沿立面上下移动的特殊建筑施工用工程机械[2]。随着现代化技术的发展,高空作业平台在向大型化、异形化发展的同时,其结构形式和安全性亦受到了极大的关注。若设计和制造不当,在一些情况下就有可能发生结构的失稳和材料的连接破坏,从而无法充分发挥材料的优良性能,结构也就达不到较高的承载力和延性[3]。在通常情况下,自振频率是研究瞬态动力学分析和谐响应分析等的必要参考,所以对高空作业平台结构的自振频率研究是设计工作中的重要内容。
1 高空作业平台有限元模型的构建
为了确保计算精确,减少计算量,且模型能够真实地反映高空作业平台的力学特性,在建模时需对其实际结构进行简化,根据高空作业平台的结构特点及工作情况可进行以下简化:
1)模块结构间均采用螺栓连接,且假设强度足够,简化后可视为刚性连接;
2)由于螺栓、螺孔等对高空作业平台的结构影响不大,故在建模时可忽略不计;
3)忽略焊缝材料特性的变化,视焊接处的材料特性与相邻结构的完全相同。
高空作业平台是由栏杆、底架、提升架等组成的空间桁架结构,其整体结构参数及单元选择如表1所示。
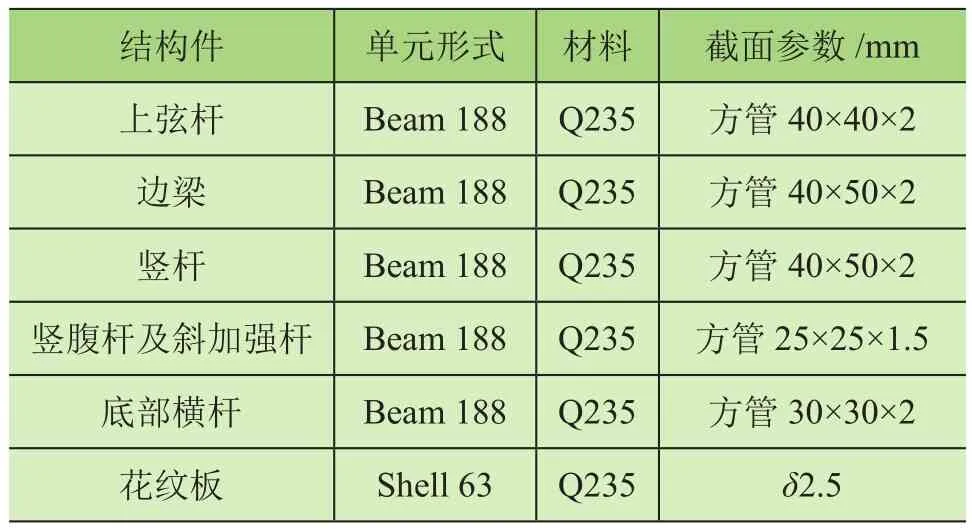
表1 平台结构整体组成
本文以ZLP630型高空作业平台为例进行有限元分析,该高空作业平台的主要结构为3×(2 000 mm×650 mm×890 mm),自重为480 kg,由6片2 m长的标准节及其底架和2片提升架组合而成,底架为2.5 mm的花纹板、边梁和底架横杆焊接而成。标准节与标准节、底板及提升架之间全部通过螺栓连接。高空作业平台的结构及花纹板均采用Q235钢,其弹性模量E=2.1×1011Pa,泊松比μ=0.3,密度ρ=7 800 kg/m3。高空作业平台的有限元模型如图1所示。
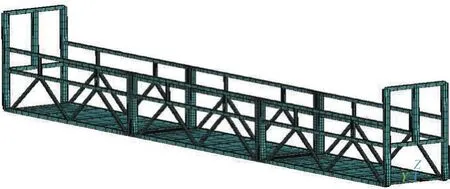
图1 高空作业平台有限元模型
2 平台模态分析
固有频率和振动特性是进行高空作业平台结构设计时必不可少的参数,故有必要对平台进行固有特性的模态分析[4]。由于结构的振动可以表达为各阶固有振型的线性组合,故其中低阶振型对结构的动力影响程度比高阶振型大[5]。
模态分析的本质是求解具有有限个自由度的无阻尼和无外载荷状态下的运动方程的模态矢量,由于结构的阻尼对其自振频率及振型影响很小,故可以忽略[6]。鉴于此,结构系统的无阻尼自由振动方程可表示为
式中:[M]为质量矩阵,[K]为刚度矩阵,δ为节点处的位移。
由此,整理可得圆频率ω与相应振型φ的方程为
这是一个广义特征值问题,也称为振型特征值问题,其方程可改写为
式(3)为关于φ的n个分量的线性齐次代数方程组,它有非零解的充要条件是左端系数矩阵的行列式为零,即有
这就是关于ω的方程,即频率方程,式(4)为n次多项式,由于n次代数方程对于n个根,即可得到与ω相应的非零解φ,亦即相应的振型。
计算分析的前4阶固有频率如表2所示,对应的各阶模态阵型图如图2所示。
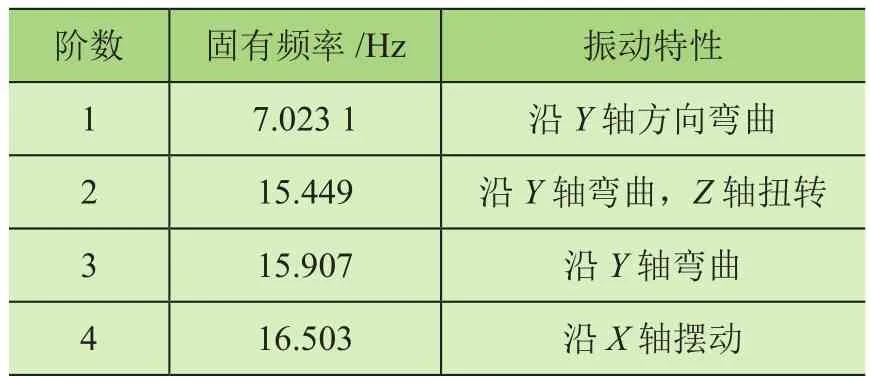
表2 平台前4阶固有频率
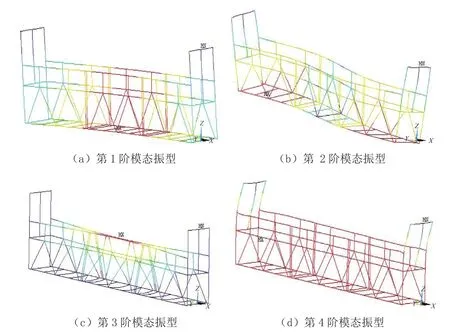
图2 高空作业平台前4阶模态阵型图
由以上分析可得,第1阶模态主要表现为沿Y轴弯曲,最大振幅出现在高空作业平台的中间位置;第2阶模态主要表现为整体的弯曲和扭转,以高空作业平台的中间位置为反对称中心扭转,最大变形出现在两端,其振幅变化最大,应避免此频率范围;第3阶模态则以Y轴方向的弯曲为主,X轴方向变形不明显,最大变形出现在梁上部的中间位置,同时也应对底部加强杆进行校核;第4阶则主要表现为X轴方向的摆动,出现在高空作业平台两端底部。
根据高空作业平台标准可知,高空作业平台的低阶频率不能与提升机的工作频率相近,经计算可知提升机工作频率为50 Hz。已知高空作业平台的低阶频率有效地避免了与其发生共振的可能,满足了整体结构的动态性能要求。
3 自振频率的影响因素计算分析
3.1 高空作业平台外形尺寸对自振频率的影响
通过研究简支桥梁可以得到,影响简支梁频率的主要因素为跨径、惯性矩、质量等,而惯性矩主要受梁高和宽度等的影响,质量则包括自重和二期恒载[7](在此未予考虑)。本文通过研究高空作业平台长L、宽W、高H的改变对其自振频率的影响,计算相应工况下高空作业平台频率的大小,分析这些因素对高空作业平台的反应灵敏度。
1)由表3所示数据可知,随着高空作业平台长度的增加,其自振频率明显有大幅度降低,所以自振频率对长度变化的反应灵敏。

表3 高空作业平台频率随长度变化情况
2)由表4所示数据可知,随着宽度的增大,高空作业平台的频率呈线性递减,说明高空作业平台频率对其宽度的变化反应灵敏,适当减小其宽度可有效地提高自振频率。

表4 高空作业平台频率随宽度变化情况
3)由表5所示数据可知,高空作业平台的自振频率随其自身高度的增加而降低,但影响微乎其微。而且,当高度高于1.3 m时,其自振频率有上升的趋势,故在设计时应引起注意。

表5 高空作业平台频率随高度变化情况
根据上述分析可知,高空作业平台的长度、宽度是影响其频率变化的主要因素,而高度的影响极其微弱。然而,从经济、美观的角度考虑,仍应在满足作业要求的条件下尽量降低高空作业平台的长度和高度,并应在满足安全要求的前提下尽量节省材料。
3.2 固定长宽比条件下频率随长度变化的反映特性分析
高空作业平台的长度和宽度是影响其自振频率的主要因素,为了便于研究其频率随长度的变化特征,本文采用固定的长宽比进行研究,使高空作业平台的宽度随长度作相应变化,其余参数保持不变。
由表6所示数据可知,随着高空作业平台长度的增大,在固定长宽比条件下的自振频率几乎呈线性减低,说明在长度较大时选择较大的长宽比更有利于提高高空作业平台的固有频率。

表6 固定长宽比下不同长度的频率变化情况
3.3 高空作业平台不等高时一侧变化对自振频率的影响
由以上分析计算可知,高空作业平台高度的变化对自振频率的影响很小,在满足其标准高度的条件下一侧高度固定,另一侧高度作相应变化,其余参数不变。
由表7所示数据可知,高空作业平台的频率随一侧高度的增加而呈线性递减,但灵敏度极其微弱,所以,设计时在满足标准条件下可以忽略高度的因素。

表7 自振频率随一侧高度的变化影响
4 结论
1)通过对高空作业平台的分析计算,得到高空作业平台的自振频率随其长度的增加而明显降低,随其宽度的增大频率呈线性递减,而高度的增大对其自振频率影响微弱,反映极其不灵敏。
2)在定长宽比的条件下,自振频率随高空作业平台长度的增大而降低,所以当长度较大时,应该采用较大长宽比设计。
3)考虑到经济、美观等因素,应综合考虑对高空作业平台长、宽、高的设计。通过计算分析可知,一侧高度的变化对频率的影响极其微弱,在满足标准的条件下可以尽量降低一侧高度,以便节省材料。
4)根据模态分析得出高空作业平台的低阶固有频率有效地避免了提升机正常的工作频率50 Hz,避免了发生整体共振现象。
5)了解高空作业平台的振动特性,对其结构的振动故障提高依据,避免了高空作业平台结构因操作失误而产生的共振现象。
6)识别高空作业平台的模态参数,有利于其对不同外部载荷的响应分析。
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18
兰州交通大学学报(2022年2期)2022-04-26
昆明医科大学学报(2022年3期)2022-04-19
结构工程师(2020年2期)2020-06-17
特种结构(2019年2期)2019-08-19
电子制作(2018年19期)2018-11-14
同济大学学报(自然科学版)(2018年1期)2018-02-08
广西科技大学学报(2016年1期)2016-06-22
工业设计(2016年6期)2016-04-17
工业设计(2016年6期)2016-04-17
