基于T-S模糊故障树的矿井提升机可靠性分析
2022-03-08 12:15刘东儒
呼伦贝尔学院学报 2022年6期
刘东儒
(池州职业技术学院 安徽 池州 247000)
1 引言
矿井提升机在整个矿山的机械设备中堪称“咽喉”的最重要的部位,它在整个矿井中都占有着重要的战略地位,在搭乘者出入矿山以及设备搬运等方面都起到了重大作用。所以,提升机设备在矿内工作出现问题后,一旦没有及时发现,会威胁工人生命安全,同时还会延误矿内其他工作的进行。在矿井中,由于提升机是地下唯一的通向地面通道纽带,因此无论是国外还是国内,都非常重视提升机在坑道内工作的安全问题,并将其列为第一位,但是每年在矿井中作业时还是会发生大量的安全事故。为了避免事故的发生,要求定期检查。但多次实践结果表明,采用定期维护和检查的方法对改善矿井安全有效果,但是对于结构复杂和大型设备进行故障处理时,不是过度维护就是维护不足,而且检查方法欠周到,给矿井生产带来了巨大的经济损失。有些故障不能经常维修,长期拆装更容易出现故障。因此,利用故障诊断理论解决此问题也随之诞生。
故障树分析法(FTA)是由上到下,利用图形演绎来寻找故障方法的之一,例如故障的诊断方法有观察法、对比检查法等,但这些方法所需要的故障具有准确性、逻辑性之间的关联关系等条件影响着稳定性研究和诊断领域中的应用。然而仍然有很多的专家学者做过大量的科学研究,例如,张梅等提出了将模糊故障树和贝叶斯网络相结合,用在矿机提升机故障诊断方面。[1]利用三角模糊数来计算出提升机底事件的发生概率,然后得到事件的模糊概率,最后再将故障树映射到贝叶斯网络,完成了稳定性研究。此方法使用模糊数表示事件发生的概率,但仅为估计的概率,误差较大;李娟莉等提出了利用ANN的矿井提升机故障诊断方法,利用矿井提升机中主轴装置的机械结构和故障振动频率特性,并利用ANN神经网络方法为矿井提升机的主轴故障诊断方法构建模型。[2]该方法的对测量的数据要求高且数据准确,而且神经网络本身就是一个“黑箱子”模型,用它作为故障预测的概率,虽然有很好的拟合能力,但是拟合能力具有局限性,对于复杂的系统误差很大;王建军等提出了CNN神经网络的矿井提升机的诊断算法。该方法建立了基于CNN的提升机制动系统故障诊断模型,对监测数据进行编码,生成故障诊断数据集,通过梯度下降算法训练神经网络,提高了故障诊断的准确性。[3]但是梯度下降算法遍布全部样例需要大量时间,尤其当数据很大时,对参数更新起不了太大作用。本文针对矿井提升机控制系统故障树底事件发生机率不确定性的难题,提出基于T-S模糊故障树分析FFTA(Fuzzy Faul Tree AnalySis)解决了控制系统故障树事物间关联无法明确的难题,首先以T-S逻辑门代替了传统的逻辑门的方法,接着以模糊数的方式表示各事物的发生过程。通过可靠性的分析,找出事故故障的发生源,大大提高了故障诊断速度和判断的精度。
2 矿井提升机的结构系统和故障
2.1 结构模型
矿井提升系统主要由控制操作台、控制装置设备、整流拖动装置、低压配电柜、高压开关柜这几个部分组成,主井提升机在整个系统中处于“咽喉”的地位,用于输送物品,矿井提升机在平面四个象限内运动平滑,不仅满足一定的速度匀速向上运动和特殊情况下要求减速运动,又必须满足提升机运行时实际工况的可靠性规定。在整个体系中,矿井提升机是最重要的构成部分,首先提升机结构复杂、设备操作困难[4],涉及许多系统和众多元器件,分解到具体的某个部分难度很大,而矿井提升机的主体构件一般是包括制动体系、工作机构、机械制动体系等。如下图1所示:

图1 矿井提升机的结构模型
由图1可知,由于矿井提升机系统事故发生的情况不相同,可分成机械类事故和系统故障两个类别。在机械类故障出现后,由于问题点发生在各个部件上,从而机械类故障问题也被细分成了很多的子问题形式。同理每一级别又有各种故障,可以一直往下分解。
2.2 常见故障及其特点
当矿井提升机日常运行情况下,各种故障都是随机发生,因此出现异常现象时要仔细分析,结合一定的推理依据,利用排除法对可能造成故障的所有可能因素进行分析排除,直到找到故障发生源则停止。探测导致事故产生的原因,获取事故部位的故障信息,根据这些信息加以分析与解决,这便是提升机故障诊断的实现步骤。最常见的引起故障的原因包括:钢丝绳打滑、超速现象、制动力矩小、跳闸、机械传动故障。[5]钢丝绳打滑是因为超载严重;超速现象是因为给定速度偏大,速度反馈回路不工作导致;跳闸是由于电枢回路使得电流过大跳闸;机械传动故障是电动机在停止故障时,油泵吸油口进入内部导致产生油泡,或者内部漏油。
首先,矿井提升机故障的特点是内部结构具有复杂性,体现在一个故障现象可能有多个原因引起。再有故障认识不够,没有办法找出所有故障原因和现象一一对应,就会有一定的误差。在矿井提升机内部有多个子系统,一旦发生故障,就要查清故障在哪一级别发生;其次,如果提升机故障可能是多个故障共同导致,可能会有内部关系,很难分出是哪个因素导致的故障;最后,由于其内部结构复杂,工作环境比较差,很难搞清楚什么时候会发生故障。
3 T-S模糊故障树
故障树分析法(FTA)要求判断顶事件和各个底事故之间的故障发生可行性,且事故间的相互关联关系必须清楚。但由于矿井提升机的发生事故成因均具有许多不确定性,且其中不确定性因子往往具有随机性和模糊性,因而在故障诊断实践中使用的故障树分析方法往往具有较大难度,且判断的精度也比较低下。在模糊树故障研究方法中,通常使用模糊数来表示事故的可行性,由于系统可靠性的取值必须在特定的范围内,因此工程专业技术人员也可以通过实际项目案例来判断概率模糊值,这样降低了事情故障发生概率的精确度,这种方式也比较适用,应用领域也比较宽。基于T-S模型的模糊故障树研究基本思路是优先选择顶事件[6]。首先,建立T-S模糊门故障树,研究各底事件的故障可行性;接着运用专家方法建立T-S门规则表,再利用T-S计算求出中心事件与顶事件故障之间的模糊概率;最后,再通过模糊门故障树研究的结论寻找故障根源。
3.1 事件描述方法
在T-S模糊故障树中,一般情况下用[0.1]范围内的模糊数来描述事件的状态。通常情况下的三种故障状态为无故障、半故障、有故障,用模糊数0、0.5、1来分别一一对应表示。本文中使用梯形隶属函数用作模糊数的函数为方便应用并不失一般性,使用了梯形隶属函数用作故障程度的模糊数隶属函数。梯形隶属函数表现为如图2所示:

图2 模糊隶属度函数
从上图2可知,当时B1=C1=0,为三角形隶属函数;当B1=B2,C1=C2时,此时模糊数就是常数。也可以把上述隶属度函数表示成,T=(T0,B1,C1,C2,B2)此式中:T0表示模糊支撑集中心,B1和C2表示支撑半径,和表示模糊区。所以构建以下模糊隶属度函数:
(1)
由公式1可知隶属度函数是表示一个部件在其所在状态域上的函数,前面说明如果一部件xi有三种状态,那么满足此部件的三种状态无故障、半故障和有故障情况下隶属函数的和为1。即有:
u0(xi)+u0.5(xi)+u1(xi)=1
(2)
3.2 T-S模糊门算法

(3)
所以模糊事件可能性为:
(4)

(5)

(6)

4 T-S故障树矿井提升机诊断分析
构建T-S模糊故障树
由于提升机结构复杂、体积过大、工作环境条件复杂多变,导致出现故障的原因也有许多,因此需要构建基于T-S矿井提升机故障树的算法,顶事件T由拖动故障、滑动故障、液压制动故障构成。各底事件x=分别代表机油温度高,机油压力大,机油杂质多,安全阀卡阻,闸瓦间隙不稳定,闸盘过热,电动机速度过快,电动机电流大,电动机温度高。各底事件和中间事件故障程度用模糊数表示,根据李兴运等[8]在文章中选取模糊隶属函数B1=B2=0.1,C1=C2=0.3并依据专家研究经验和目前已知的测得数据,得出了T-S模糊门规则。
如图3所示T-S动态故障树,包括9个基本事件x1,x2,x3,x4,x5,x6,x7,x8,x9,3个中间事件y1,y2,y3,1个顶事件T,4个动态门为门1,门2,门3,门4。在数字电路学习过程中,与门或门不能准确描述事件的动态关系,所以学者们优先提出动态逻辑门。为了对矿井提升机系统进行定量分析,设定门 1、门 2、门 3、T-S门规则如表1至表4所示。

图3 T-S动态故障树

表1 T-S模糊门1规则

表2 T-S模糊门2规则
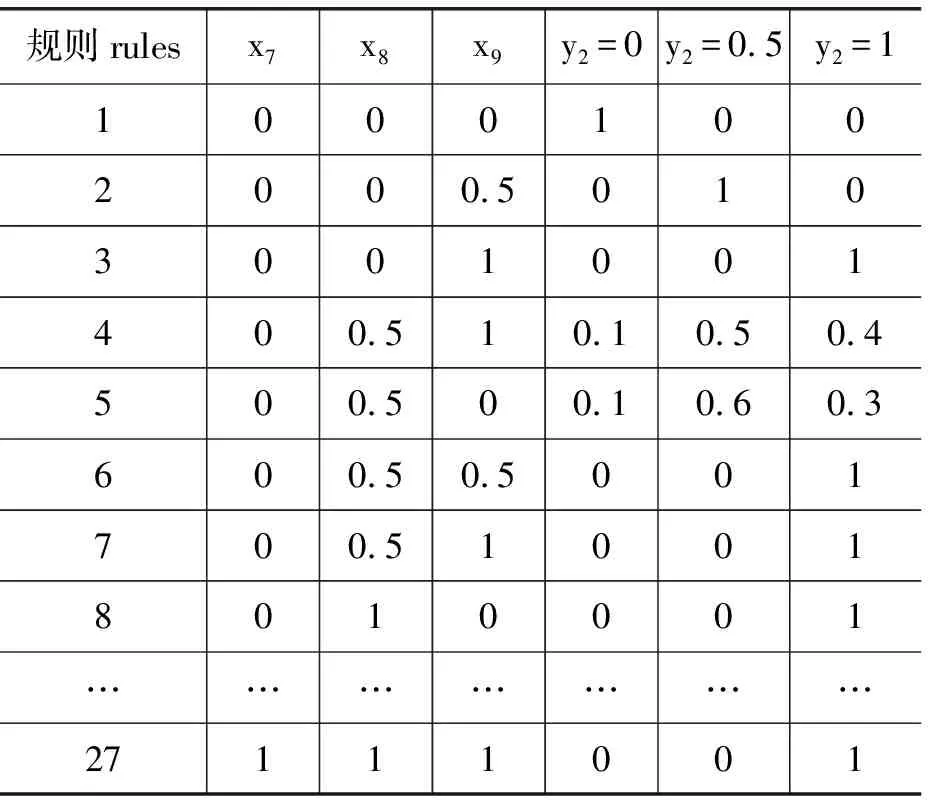
表3 T-S糊门3规则

表4 T-S模糊门4规则
表1至表4中每一行都表示一条模糊的规则,其中规则1表示为:在表一中,y1表示拖动故障、y2表示滑动故障、y3表示液压制动故障。第一行的规则为:若y1=0,y2=0,y3=0,则可以得出顶事件T=0的模糊可能性为1,T=0.5的模糊可能性为0,T=1的模糊可能性为0。由此可知,能够通过T-S模式计算出由底事件的模糊可行性测算出顶事物的模糊可行性,也能够通过由底事件的故障程度测算出顶事物的低故障程度的模糊可行性。
5 计算分析
5.1系统发生故障的模糊性的可行性计算
利用模糊故障树和T-S模糊门规则,可根据系统已知底事件中每个部件故障的概率计算出模糊性。利用专家综合评价的故障树底事件失效率方法,进行统计整理出各底事件的故障机率与模糊可能性。统计近10年来矿井提升机出现故障的可能性[9],根据经验所知,发生故障的概率大约占10%。根据下表所示,专家多年的经验,得出故障概率,见表5所示。

表5 基本事件的故障率
根据上表5的数据看出x1到x9故障程度为1的模糊可能性,若各事件故障程度为0.5数据和为1时的数据概率相同,根据1-4表中的数据得出各中间事物与顶事物之间的模糊可能性如下:
同理可以计算出
所以,顶事件矿井提升机模糊故障的可能性为:
5.2 中间事件的模糊可能性

P(y3=0)=0.05
p(y3=0.5)=0.813
p(y3=1)=0.137
结合上述计算也可以得出,在矿井提升控制系统中都是控制系统的重要环节,同时也是控制系统中最易发生问题的部分,所以在事故检测中也是需要特别注意检测,而上述的模糊度的计算也反映了最基本的事故对系统可靠性的影响范围[11],当底事件中发生故障时,中间事件出现故障较大,导致顶事件出现故障,进而引起顶事件矿井提升机故障,与实际相符。
6 结论与讨论
6.1 结论
本文针对矿井提升机故障的诊断成功率低、复杂性大、复杂度大,对矿井提升机系统进行了可靠性评估,找出矿井提升机的薄弱环节。得出结论如下:
(1)T-S模糊故障树分析法与模糊数学理论紧密结合,估算出底事件模糊可能性,进而知道整个系统的脆弱环节,此可靠性分析方法有效解决了传统故障树分析法的局限性,有效解决了在传统FTA方案中必须了解事件间的逻辑关系才能实现建立故障树,解决了复杂控制系统中的模糊输入问题和模糊逻辑的关系问题。
(2)针对某些较新的设备和系统复杂性较高的故障以及数据缺乏的可靠性评价问题给出了方案指引,进而实现安全可靠的优化方案设计与维修决策制定。充分考虑到了矿井提升机在整个寿命期的工作状况,用无故障、半故障、故障三个阶段工作状况对整个控制系统的运营状况作出说明,比较贴合现实工程。
6.2 讨论
两点值得探讨:
(1)底事件的发生故障概率和可能造成的经济损失,利用T-S模糊故障树,给出了此方法的可行性分析。根据计算模糊可能性的结果,找出系统的薄弱环节,结果表明安全阀卡阻、闸瓦间隙不稳定、闸盘过热为系统的薄弱环节,为矿井提升机今后的经济性及可靠性提高了理论依据。
(2)通过对结果的研究,发现结论与实际工况相符合。证明了T-S模糊故障树的故障诊断是有效的。考虑到底事件引起故障的可能性及其故障发生之后带来的损失,通过故障的模糊性计算研究,可以研究故障树的可靠性问题而不能研究其工作性能方面,须在今后的工作中继续深入地探讨。
猜你喜欢
山东冶金(2022年4期)2022-09-14
电子乐园·上旬刊(2022年5期)2022-04-09
一重技术(2021年5期)2022-01-18
中国煤炭工业(2019年3期)2019-08-27
中国煤炭工业(2019年1期)2019-06-17
电子制作(2018年10期)2018-08-04
当代矿工(2017年1期)2017-03-03
重庆工商大学学报(自然科学版)(2015年10期)2015-12-28
同煤科技(2015年4期)2015-08-21
中国高新技术企业(2015年13期)2015-04-30