
基于UWB的地下车库智慧导航系统设计
2022-03-09 13:31王晨源杨惠茹
河南科技 2022年2期
王晨源 杨惠茹
摘 要:为解决目前国内地下车库导航信号差、停车难、找车难的问题,实现车库管理的智能化和高效化,设计了基于UWB的高精度室内智能导航系统。本系统利用UWB高精度室内定位技术,收集精度极高且准确的定位数据,提供预约车位服务,并智能导航指引用户驱车前往空车位,同时给车主提供一条最佳取车路线,方便车主反向寻车。
关键词:UWB;智能导航;智慧车库;TOF算法
中图分类号:N945.23 文献标志码:A 文章编号:1003-5168(2022)2-0006-04
DOI:10.19968/j.cnki.hnkj.1003-5168.2022.02.001
Design of Intelligent Navigation System for Underground Garage Based on UWB
WANG Chenyuan YANG Huiru
(Henan University,Kaifeng 475001,China)
Abstract: In order to solve the problems of poor navigation signal, difficult parking, and difficult car finding in domestic underground garages, and realize the intelligent and efficient garage management, a high-precision indoor intelligent navigation system based on uwb is designed. This system uses UWB (Ultra-Wideband) high-precision indoor positioning technology to collect extremely accurate and accurate positioning data, provide reserved parking spaces, and intelligent navigation guides users to drive to empty parking spaces, while providing car owners with an optimal pick-up route. It is convenient for car owners to find the car in reverse.
Keywords: UWB;intelligent navigation;smart garage;TOF algorithm
1 需求分析
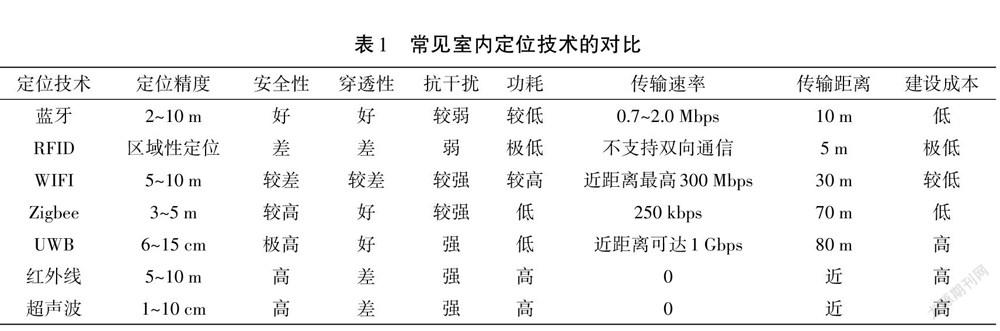
目前室內环境日益复杂,单一的定位系统已经不能满足人们对定位准确的需求。由于GPS信号在室内环境中衰减得很严重,甚至有时候会出现搜索不到信号的情况,导致室内定位不能直接采用室外定位的方法。常见的室内定位技术有蓝牙定位技术、WIFI定位技术和超声波定位技术,这三种技术存在不同程度的缺点,这些定位技术的比较如表1所示[1-2]。如何结合以上定位技术的优点,做到定位精确、功耗低和信号强,对室内导航技术的发展有深远意义[3]。随着科技的快速发展,家庭私有车辆数目不断增加,高交互性的车库系统逐渐融入人们的生活中,使停车、取车更加方便快捷。而现有的车库车位识别装置大多采用IC卡的方式对车位进行管理,车主通过刷卡的方式进行车位使用,后台系统根据刷卡结果仅能反映车位数量的使用情况,却无法指示具体的空余车位位置,管理不便。再者,现有的车库均需要车主自主寻找空余车位、记忆车辆所停位置,时常发生车主忘记给停车标示码拍照而不能快速找到自家车所在位置的问题[4]。
2 概要设计
基于超宽带通信技术(UWB)高精度地下车库导航系统是一套完整的智能导航系统。本系统根据UWB技术,获取标签相对精确的位置信息,并能实时把定位到的坐标值通过无线数传模块传送到计算机上,然后在上位机软件中对标签进行实时定位和轨迹绘制,通过观察PC端就能准确知道标签在什么位置。该系统包括UWB基站和贴有UWB定位标签的车辆入场卡,用户进入停车场后通过用户端APP可以查看车辆相关信息,如入场时间、当前位置、空余车位数量及位置,用户可在APP中选择空闲车位并在导航指引下前往,UWB基站设置在车库的停车区内。通过智能路径规划算法,系统不仅可以为用户提供可选择的空余车位导航,还能在用户端APP实时显示车辆所在位置,便于用户停车后查看车辆位置。
3 详细设计
3.1 UWB室内精确定位
在定位技术方面,本系统选用的是UWB高精度室内定位技术。UWB是一种以低功率在短距离内高速传输数据的无线技术,原本专属于美国军方,2002年2月美国联邦通信委员会(FCC)才正式批准民用,UWB自可民用以来便备受关注,因其具有一系列优良的技术特性,成为极具竞争力的短距高速无线传输技术,在众多领域发挥出巨大作用。
3.1.1 UWB通信技术的优点。第一,UWB的精确度极高。UWB是一种无线载波通信技术,它不采用常见的正弦载波,而是利用纳秒级的非正弦波窄脉冲传输数据,利用在短时间内产生脉冲序列,使得脉冲开始和结束的时间更容易被测量,通过使用两个无线电设备通信所花费的时间来计算出两个设备之间的距离,所以它比WIFI和蓝牙定位技术通过信号强度来估算距离更加精确。
第二,UWB的发射功率低,更容易做低功耗的设备。因为UWB不采用载波形式,仅在发射窄脉冲的时候产生一定的能量,因此节省了在连续发射载波时的大量能耗,使得UWB的带宽高,但是功耗并不增加。
按照FCC的规定,UWB的带宽频率为3.1~10.6 GHz,因此在日常使用UWB时要根据规定合理合法使用。
UWB定位方法因其高带宽、高传输速率、穿透性好、高安全性、低功耗以及高定位精度等优势,已成为室内定位中最有前景的技术之一。UWB通常采用以下两种定位算法。一种是TOF(Time of Flight)定位算法,TOF测距不依赖基站与标签的时间同步,因此不存在因时钟同步偏差而带来的误差,但TOF的误差来源于时钟精度,时钟偏移的误差会影响到最后的精度[5]。另一种是TDOA(Time Difference of Arrival)定位算法,通过测量从UWB标签到两个UWB基站之间传播时间的差值,得到UWB标签到两个UWB基站之间的固定距离差,以此来确定标签的位置。
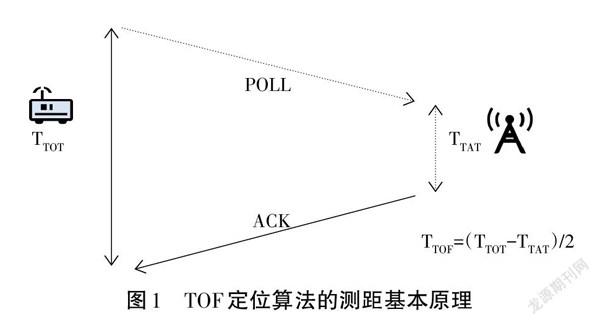
3.1.2 TOF定位算法的基本原理。本系统采用TOF定位算法(见图1),在硬件间时钟不同步的前提下,采用单边双向测距,可以分别测量出标签与3个基站的距离,以此确定标签的位置。
移动状态的标签首先向基站发送请求测距的数据包,基站收到数据包后开始处理信息,一段时间后将信息传回移动的基站。规定发送端(移动标签)从发出信号到接收回应的时间间隔记为TTOT,接收端(基站)收到测距请求和发出回应的时间间隔记为TTAT,因此可推导出信号在空中的单向时间TTOF为:
TTOF=(TTOT-TTAT)/2 (1)
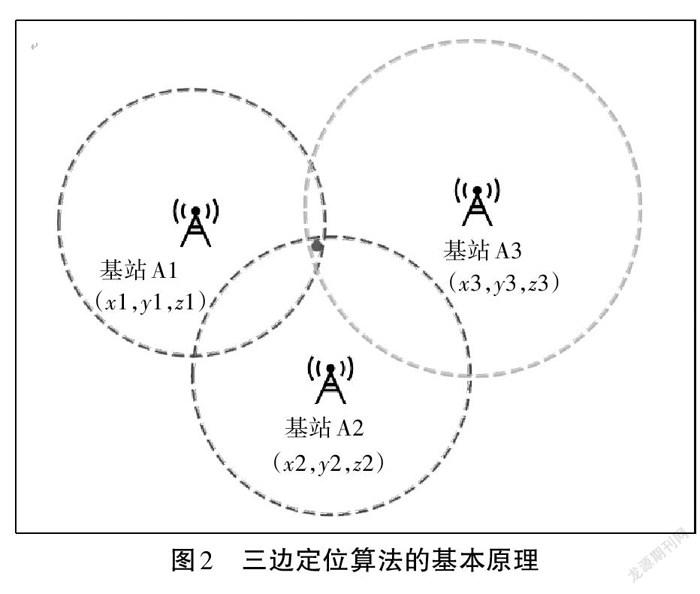
根据TOF算法可以较精确地计算出标签和1个基站之间的距离,要确定标签的具体位置至少需要知道其和3个基站的距离,依据三边定位算法(见图2),以基站为圆心,以标签与基站之间的距离为半径作圆,3个圆相交的地点即标签的位置。
在本系统中,用户进入车库时会收到车辆入场卡,该卡内置UWB定位标签,根据停车场布置的基站可定位车辆所在位置。根据智能导航引导车主驱车前往推荐的空余车位,也可自行寻找车位停车。自车辆进入地下停车场起到车主驾车离开,用户可根据手机上的服务端APP看到车辆所在位置,便于取车时寻找车辆。
3.2 路径规划
3.2.1 车位推荐。带有标签的车辆进入车库后,后台系统会根据剩余车位所在位置与车辆当前定位做比对,智能规划出最优车位的位置并指引用户驱车前往。进入车位后,车内的标签会定位该车辆位置,在管理员服务端的上位机中会显示此处已有车辆停放,后来车辆将无法选择停在此处。在车辆入场时被车牌识别仪获取的车牌号,用户手机上的APP会显示自家车辆的停车信息,方便后续找车取车,达到车库与用户的良好交互。
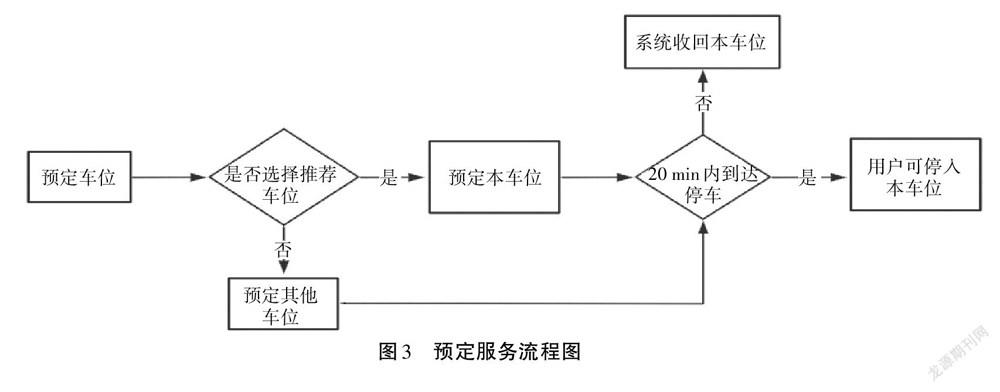
3.2.2 预订服务。用户可以选择系统推荐的最优车位,也可自由选择空闲车位。如若选择自助停车,用户在还未到达停车场时便可在系统上提前预定本车位,系统会显示本车位已预定,为用户预留20 min的车位,提供最便捷的停车方式。若超过20 min用户还未到达停车场,系统将自动收回,并显示此处为空余车位,如图3所示。
3.2.3 智能导航。根据数据结构相关知识,Dijkstra(迪杰斯特拉)算法是典型的单源最短路径算法,将各节点的相邻距离组成二维矩阵,可以计算出节点间的最短距离以及看出各节点是否存在通路。
本智能导航系统使用广度优先遍历(BFS)算法,定义startpoint为路径遍历点,endpoint为路径遍历端点,在进行路径智能导航时,运用广度优先遍历算法找出关键路径[6]。根据地下停车场车位的位置画出基本图,每个车位都是一个节点,从图的一个未遍历的节点出发,先遍历这个节点的相邻节点(假设为A0),再依次遍历每个相邻节点(A0)的相邻节点(假设为A1),即可找到关键路径,其上的各节点都是关键点,将关键路径显示在地图上,实现路径导航功能。
3.3 人机交互设置
本系统采用 Arduino IDE V1.8.6 制作上位机软件,用Android等语言设计系统APP,用户通过下载APP并注册登录绑定车辆信息,联网成功后即可在APP中看到人机交互的相关信息,进行预定车位、查找空车位、停车导航等。
4 创新突出
现有地下停车场主要有以下4种:遥控停车场、立体停车庫、机械式停车场、IC卡停车场。本系统(基于UWB的高精度智库系统)相较现有地下停车场系统而言,有着更丰富且智能的创新点。
4.1 市面已有停车场存在的问题
4.1.1 智能化不高。我国现有地下停车场智能化不高。现有停车场系统没有智能导航这一功能用来引领用户前往空余车位,用户需要进入停车场后自行寻找空余车位,费时费力。在进入不熟悉的停车场后,用户可能无法轻松找到自己的车和离开的路线。
4.1.2 多为人工管理,成本高。随着城市车辆的保有量逐年增加,停车场规模也日益大型化,加之其服务的车辆繁杂,人工管理的效率和可靠性已难以满足其在管理上提出的要求,从长远来看,人工管理成本高,管理商需要花费大量人力、物力定时巡视和管理停车场。
4.1.3 地下定位精度低。目前市面上并未出现室内定位导航系统,已存在的较为成熟的导航系统,如百度地图、高德地图等,并不适用于室内定位和导航,尤其是对存在遮盖的地下车库而言,已有的系统会出现信号差、定位精度低等问题,不能满足用户的需求。
4.2 创新点
4.2.1 智能管理。将先进的人工智能技术引入车库,实现车库管理的无人化、智能化。基于云计算大数据,帮助交通数据运转起来,大数据实现了数据共享,让以前闲置的数据运作起来,为智慧停车提供数据的支持。
4.2.2 系统新颖。针对上述情况,在不熟悉且地形复杂的地下车库,人们对导航寻找空闲车位的需求日益强烈,同时针对停车后找不到车这种情况,车主可以通过室内定位进行查询,屏幕上会显示出车主目前的位置以及该车停放的位置,并提供一条最佳的取车路线,引导车主快速取车。
4.2.3 减少人工停车诱导,实现反向寻车。面对地形复杂的地下车库,用户也无须在停车场员工的指引下找到空余车位,凭借APP中的指引即可轻松解决这个问题,降低了停车场员工的需求量,在很大程度上节省了管理商的人工成本和管理成本。
4.2.4 采用UWB高精度定位技术。目前主流的室内定位技术存在不同程度缺点,如蓝牙定位精度较低且抗干扰性较弱,传输距离较近;WIFI定位精度极低、穿透性的安全性较差;红外线定位技术的传输距离较近、穿透性差。UWB定位技术最突出的特点是其具有高精度室内定位能力,在地下车库信号差的情况下,可以高精度地定位到标签的位置,满足用户室内定位的需求。
5 结语
本系统有着巨大的市场应用前景,通过多次试验收集数据,分析其结果发现符合预期要求,能够有效解决地下车库导航信号差、车主停车难、取车难的问题,减少车库管理人员的雇佣,降低车库管理成本,提高管理效率,从而实现智慧车库的设计。
参考文献:
[1] 丁亚男,张旭,徐露.基于UWB的室内定位技术综述[J].智能计算机与应用,2019(5):91-94.
[2] 谢恩德,洪毅.室内定位方法综述[J].电脑知识与技术,2021(11):231-234,244.
[3] 臧利国,唐一鸣,沈业辉,等.基于UWB的智能召车导航定位系统研究[J].重庆理工大学学报(自然科学),2021(7):45-52.
[4] 冯九发,黎宇恒,黄建泉,等.基于UWB的车库交互系统研究[J].机电信息,2020(6):25-26.
[5] 郝晴晴.基于UWB的超高精度室内定位系统[J].无线互联科技,2021(16):120-122.
[6] 谢宏兰.室内停车场车辆定位及导航系统的设计[J].电脑知识与技术,2020(12):219-220,224.
