
利用磁传感器阵列磁场差值的舰船磁场反演建模方法
2022-03-14 02:58郭成豹胡松王文井殷琦琦
兵工学报 2022年1期
郭成豹, 胡松, 王文井, 殷琦琦
(海军工程大学 电气工程学院, 湖北 武汉 430033)
0 引言
舰船磁隐身对于各国海军都是非常重要的关注点,舰船磁场的空间特性及其变化是舰船磁隐身技术研究中的重要内容。舰船磁场测量过程中,所测得的磁场不但包含舰船本身的磁场,还包括地磁背景场、涌浪感应磁场等。舰船磁场随着距离快速衰减,在几百米之外,会几乎淹没于环境磁场噪声或低于磁传感器分辨力。因此,舰船测磁所用的水下磁传感器阵列测量值中,舰船磁场具有较低的相关性,可采用等效源法等进行精确反演建模,例如等效为若干磁偶极子、磁单极子等。
地磁背景场主要包括:稳态的地球基本磁场、缓慢变化的长期变化场、快速变化的短期变化场(例如磁暴、地磁脉动等);人工设施造成的干扰磁场(例如地铁、用电设施等);海洋浪涌造成的涌浪感应磁场等。地球基本磁场、长期变化场可作为背景场从水下磁传感器阵列测量值中直接减去;地磁短期变化场在大尺度空间上具有完全的相关性,可在数百米之外设置地磁参考传感器进行消除;涌浪磁场可采用滤波手段抑制,也可通过在浪涌较小情况下测磁来消除。
传统的舰船磁场反演建模方法是将舰船磁源模型直接拟合到磁传感器阵列测量的磁场值上。在舰船磁场测量设施中,恶劣的磁场环境噪声会造成舰船磁场检测效能的显著降低,甚至会导致其无法工作。设置地磁参考传感器可对磁场环境噪声进行很大程度的消减。但是设置地磁参考传感器存在安装地点难选的问题,既要远离水下磁传感器阵列(不受被测舰船磁场的影响),又要避开其他磁干扰源(例如地铁、航行舰船、车辆、大型铁磁设施等),在港口或航道周边很难找到这种合适地点。人工设施干扰磁场在水下磁传感器阵列的空间尺度范围内(数十至上百米)具有较高的相关性(可消除),而对于设置地磁参考传感器所在的数百米尺度空间则仅具有较低的相关性,是无法直接消除的。Davidson等描述采用磁场差值来消除相关噪声的干扰,但是只对舰船磁场反演建模结果进行了叙述,并没有进行理论方法上的说明。因此,舰船磁场测量实践中,急需一种不设置地磁参考传感器,利用水下磁传感器阵列测量数据中的相关性分量(地磁干扰)和不相关分量(舰船磁场)特性进行地磁噪声抑制的技术方法,实现舰船磁场的高精度检测分析。
本文提出一种利用水下磁传感器阵列磁场差值进行舰船磁场反演的新方法,能够直接消除地磁噪声、人工设施干扰磁场等的作用,因为阵列中磁传感器间的磁场差值不受相关磁场噪声的影响。该方法将舰船磁源模型拟合到水下磁传感器阵列中磁传感器间磁场测量值的差值(而不是磁场值本身),采用正则化技术进行舰船磁场反演建模,实现舰船磁场的高精度建模。利用典型虚拟舰船的磁场值进行验证实验,验证了所提出方法的有效性。
1 利用磁场差值的磁单极子阵列法
1.1 舰船磁单极子阵列模型的建立
磁单极子模型具有复杂度小、建模简单、计算量小的优点,而且能方便地按照舰船铁磁结构精确分布,非常适用于舰船磁场反演建模。
根据磁性理论,坐标原点存在一个磁单极子强度的磁单极子,则有

(1)
式中:为每个磁单极子在空间中特定点处所产生磁场的磁感应强度,可通过经典的磁单极子模型计算:

(2)
为真空磁导率,为磁单极子与场点之间的距离,向量从磁单极子指向场点(见图1)。图1中,为空间直角坐标系,、、分别为磁场的轴、轴、轴分量。

图1 磁单极子模型Fig.1 Magnetic monopole model
舰船铁磁结构可以划分为一定数目的点单元,建立舰船磁单极子阵列模型,以完整体现舰船磁性信息(见图2)。

图2 舰船磁单极子阵列Fig.2 Magnetic monopole array of ship
1.2 直接利用磁场值的舰船磁单极子阵列反演模型
作为舰船磁源的舰船磁单极子阵列含个磁单极子,设磁单极子(=1,2,…,)的坐标为(,,),强度为舰船周围包含个传感器测量点(场点),设场点(=1,2,…,)的坐标为(,,)所有磁单极子在场点处产生的磁感应强度=[,,]可根据(3)式、(4)式和(5)式计算:

(3)

(4)

(5)
式中:

(6)

(7)

(8)
考虑所有场点,得到线性方程组:
=,
(9)
式中:
=[,,,…,,,];
(10)
=[,,…,];
(11)

(12)
根据舰船磁源模型和磁特征测量数据,采用正则化方法,可反演得到磁单极子强度.舰船下方的测磁传感器阵列测量的磁场数据可作为反演问题的目标磁场。问题的目标函数在数学上可定义为

(-o),
(13)
式中:、、为测量点上的磁感应强度三分量的预测值,其是基于计算过程获得的磁单极子分布;o、o、o为测量点上的舰船磁场三分量测量值。研究结果表明,磁单极子阵列法具有很高反演建模精度、可靠性和速度。
1.3 利用磁场差值的舰船磁单极子阵列反演模型
假设舰船从一个水下磁传感器线阵上方通过(见图3),每隔一定时间间隔磁场采样一次,相当于在舰船下方构成一个虚拟的长方形水下磁传感器阵列(见图4)。

图3 舰船航行通过一个磁传感器线阵Fig.3 Ship passing over a line array of magnetic sensors

图4 舰船及其下方的虚拟磁传感器阵列Fig.4 Ship and a virtual array of magnetic sensors below it
对于一艘舰船,配置个磁单极子,序号为=1,2,3,…,,第个磁单极子的坐标为(,,)。舰船磁场测量过程共有个测量时刻(=1,2,…,)。磁传感器线阵共有个磁传感器,序号=1,2,3,…,,时刻时第个磁传感器的坐标为(,,)。每个采样时刻,磁传感器线阵中的所有磁传感器同步采集磁场数据。所有磁单极子在时刻时第个磁传感器处所产生的磁感应强度=[,,]可根据(14)式、(15)式、(16)式计算:

(14)

(15)

(16)
式中:

(17)

(18)

(19)
在时刻时,磁传感器阵列中第个磁传感器与第个磁传感器测量值之间的差值=[,,],其中:

(20)

(21)

(22)
≠∈{1,2,3,…,}(见图5)。每个测量时刻所产生的磁场差值数目为3(-1)2

图5 磁传感器阵列的磁场数据差值Fig.5 Magnetic field difference values of an array of magnetic sensors
(20)式、(21)式和(22)式写为矩阵形式为
=,
(23)
式中:
=[-,-,-];
(24)

(25)
在时刻时,对于磁传感器阵列中磁传感器之间差值的所有组合,得到
=,
(26)
式中:
=[12,…,1,23,…,2,…,(-1)];
(27)
=[12,…,1,23,…,2,…,(-1)]
(28)
为了符合磁单极子阵列磁荷总和为0 A·m的物理实际,需要增加一个限制条件:
=0,
(29)
(30)

(31)
对于整个舰船磁场测量过程的个测量时刻和限制条件,可得
=[,…,,],
(32)

(33)
=[,…,],
(34)
从而得到整个测量过程的方程组:
=.
(35)
按照船体结构优化布置磁单极子阵列,构建舰船磁源模型。根据磁特征测量数据,可反演得到磁单极强度.舰船下方测磁阵列测量得到的磁场数据差值作为反演问题的目标磁场。问题的目标函数在数学上可定义为

(-o)+(-o),
(36)
式中:、、为时刻磁传感器和处磁场数据之间差值的预测值,其是基于计算过程中获得的磁单极子分布,o、o、o为相应的测量值。
2 正则化反演技术
在实践中,测量系统存在误差,磁源模型决定于磁性目标的位置、尺度和结构。将误差引入线性方程组可得到:
(+Δ)=(+Δ),
(37)
式中:Δ和Δ分别表示模型和测量数据的误差。
病态问题求解主要的困难涉及到下述最小二乘问题,是求解最优化问题:

(38)
本文研究的问题是超定问题,并且是病态问题,问题的解是不唯一的,通常采用正则化技术来限制解空间。已知矩阵和舰船磁场测量值差值的情况下,可采用Tikhonov正则化方法求解方程组=,得到所有磁源的正则化解。从而可得舰船磁场的拟合计算值,进而得出拟合误差。采用L曲线法选择正则化参数(见图6)。

图6 用L曲线法确定正则化参数Fig.6 Regularization parameter by L-curve method
3 数值仿真验证实验
3.1 磁单极子阵列设置
数值实验的目标为按照实际舰船结构抽象出来的一艘虚拟典型舰船,其中船长为,船宽为,船高为按照船体铁磁结构布置包含347个磁单极子的三维船体阵列(见图7)。

图7 按照舰船铁磁结构布置磁单极子阵列Fig.7 Magnetic monopole array on the ferromagnetic structure of ship
3.2 磁场测量点的配置
设磁传感器阵列宽度为2,横向间隔025,三轴磁传感器数目=9测磁时刻数目=81,展布范围长2,纵向测磁间隔为40形成的虚拟磁传感器阵列配置为2×2=×= 81×9 =729的点阵,被测舰船处于点阵的几何中心位置(见图8)。取3个测量深度平面:吃水线下方1、2、5共3个深度(见图9和图10)。设轴正向为船首方向,轴正向为右舷方向,轴正向为垂直向下。

图8 磁场测量点俯视图Fig.8 Top view of magnetic field measurement points

图9 磁场测量点侧视图Fig.9 Side view of magnetic field measurement points

图10 磁场测量点后视图Fig.10 Rear view of magnetic field measurement points
3.3 舰船磁场的产生
采用自编的舰船磁场综合分析软件MagShip产生舰船磁场,该软件联合采用磁矩量法和多层自适应交叉近似法,适用于计算复杂结构舰船的磁性磁场,近场和远场计算均能保持高精度。对于典型舰船,其铁磁结构划分数万个单元就可计算得到精确可靠的舰船磁特征,且易于处理远场(例如上述5测量深度平面磁场)。
采用10万个单元剖分虚拟典型舰船的完整铁磁结构,包含船体、上层建筑、机械设备、船轴等,能代表复杂实际舰船。采取下述设置产生舰船磁场数据,包括感应磁场、永久磁场、测磁噪声:
1)感应磁场:在纵向40 000 nT、横向20 000 nT、垂向30 000 nT的均匀外磁场作用下,舰船所产生的感应磁场;
2)永久磁场:取感应磁场的30%;
3)非相关磁噪声:取[-1 nT,1 nT]范围内的随机数作为非相关测磁噪声,主要指浪涌磁场、仪器噪声等。
3.4 相关干扰磁场的设定
本文所述的磁噪声源距离磁传感器阵列足够远,例如地磁短期变化场、数百米之外的航行舰船和地铁产生的干扰磁场等。相关磁干扰噪声可认为在磁传感器阵列所处空间上均匀分布。主要包括4种类型的磁场环境噪声:随机噪声、渐变噪声、阶梯噪声和尖峰噪声,如图11所示。图11中,对磁场环境噪声的幅值进行了归一化处理,一般量级可达数纳特斯拉~数百纳特斯拉。

图11 相关磁场环境噪声Fig.11 Coherent magnetic noises
3.5 数据分析参数的定义
为了分析数据,定义下述两个变量:
1)相对误差:

(39)
式中:表示正则化解得到的磁场预测值;表示磁场精确值。实质上表示正则化解的精确程度。这一量通常是不可知的,因为在实际问题中无法得到,但是为了验证仿真结果与真实解的逼近程度,特地定义了此量。
2)相对残差:

(40)

(41)
式中:表示正则化解;和分别表示利用磁场值和磁场差值情形下的相对残差,表示正则化解对数据的拟合程度。
3.6 数值仿真实验结果
按照31节~35节中的设置,得到具有典型意义的虚拟舰船磁性分布,产生3个测磁深度平面的舰船磁场三分量数据。采用三维船体磁单极子阵列模型进行舰船磁场反演建模,根据得到的磁单极子阵列强度在3个测磁平面之间相互进行舰船磁场预测。
无相关噪声情况下,利用磁场值的三维船体磁单极子阵列反演建模计算结果如表1所示。从表1可看出,无相关噪声情况下:在1和2深度上均有较小相对残差(005~009),对磁场差值数据的拟合较好,向其他深度延拓的相对误差较小(001~065);在5深度上相对残差稍大(049),向其他深度的延拓相对误差较大(094~555)。

表1 无相关噪声情况下利用磁场值反演建模的 计算结果Tab.1 Results of validation test utilizing the magnetic field value without noises
有相关噪声情况下,利用磁场值的三维船体磁单极子阵列反演建模计算结果如表2所示。从表2可看出,无论是随机噪声、渐变噪声、阶梯噪声,还是尖峰噪声,都会对反演建模存在一定的干扰。在1深度的拟合误差较小(065~117),向其他深度延拓的相对误差较小(049~160),这是因为相关噪声的幅值远小于1深度的舰船磁场幅值,可受到反演建模过程的抑制;在2深度的拟合误差偏大(152~283),向其他深度延拓的相对误差偏大(109~719),这是因为相关噪声的幅值相对于2深度的舰船磁场来说已经不可忽视,无法得到有效抑制;在5深度上相对残差很大(670~1348),对磁场值的拟合较差,向其他深度的延拓相对误差很大(1588~3784),这是因为相关噪声的幅值相对于5深度的舰船磁场来说已经无法抑制。

表2 有相关噪声情况下利用磁场值反演建模 的计算结果Tab.2 Results of validation test utilizing the magnetic field value with noises
根据技术原理可知,利用磁场差值进行舰船磁场反演建模可滤除相关噪声干扰,无论是随机噪声、渐变噪声、阶梯噪声,还是尖峰噪声,所得到的反演建模结果是相同的,如表3所示。从表3中可看出:在1和2深度上均有较小相对残差(007~019),对磁场差值数据的拟合较好,向其他深度延拓的相对误差较小(027~082);在5深度上相对残差较大(240),对磁场差值的拟合较差,向1深度延拓的相对误差较大(776),向2深度的延拓相对误差尚可接受(258)。

表3 利用磁场差值反演建模的计算结果Tab.3 Results of validation test utilizing the magnetic field difference
4 分析与讨论
对比表1和表3可看出,有相关噪声情况下利用磁场差值的反演建模结果与无相关噪声情况下利用磁场值的反演建模结果基本接近,证明利用磁场差值进行舰船磁场反演建模可有效抑制各种类型的相关噪声干扰。
例如,对于最不利的情形,在有相关噪声干扰的情况下,根据5深度的磁场差值可延拓3个深度的磁场值。在5深度平面对磁场差值拟合的相对残差为240,在1、2、5深度平面磁场预测的相对误差分别为776、258、051。取舰船龙骨下方坐标为∈[-,]、=0 m、=1,2,5的3条典型测量点线,进行舰船三分量磁场真实值和预测值的对比,分别如图12、图13和图14所示(图中对舰船磁场幅值进行了归一化处理,一般量级可达数百纳特斯拉~数千纳特斯拉),从中可看出,从5深度平面向1、2、5深度平面延拓的预测值与真实值均吻合较好,证明利用磁场差值的三维船体磁单极子阵列模型能够实现舰船磁场高精度预测。

图12 1B深度典型测量点线上的舰船磁场预测值和 真实值对比Fig.12 Comparison of predicted and real values of ship’s magnetic field on typical measuring point line at 1B depth

图13 2B深度典型测量点线上的舰船磁场预测值和 真实值对比Fig.13 Comparison of predicted and real values of ship’s magnetic field on typical measuring point line at 2B depth

图14 5B深度典型测量点线上的舰船磁场预测值和 真实值对比Fig.14 Comparison of predicted and real values of ship’s magnetic field on typical measuring point line at 5B depth
对比表2和表3可看出,相同磁干扰下,利用磁场差值的反演建模结果明显优于直接使用阵列传感器所测磁场值的反演建模结果。其中,从5深度延拓到1深度时,直接利用磁场值反演造成的相对误差为2513~3784,而利用磁场差值造成的相对误差仅为776,差异显著。
采用本文提出的方法,使用5深度数据计算误差还是较大,可能原因为在5深度上磁场空间梯度变小,阵列传感器所测磁场差值较小,受非相关磁噪声影响较大,因此在5深度上增大磁场测量间距进行检验。扩大传感器横向间距,阵列宽度由2扩大为4,其他设置不变(见图15)。此时,从5深度延拓到1深度时,利用磁场差值造成的相对误差为622,相对于阵列宽度2时的相对误差776有一定程度改善(见表4),但是并没有显著区别。
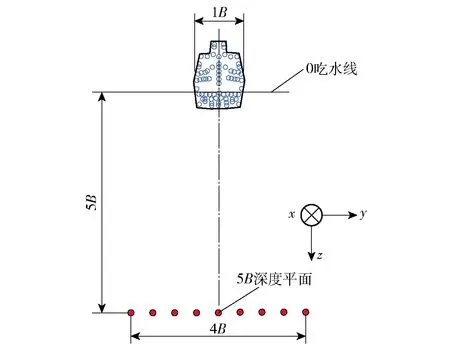
图15 间距扩大的传感器阵列Fig.15 Sensor array with enlarged spacing

表4 扩大传感器间距后利用磁场差值反演建模的计算结果
5 结论
本文提出了一种利用磁传感器阵列磁场差值的舰船磁场反演建模方法,实现了在有较大相关噪声环境中舰船磁场的精确反演建模。利用磁传感器阵列中各个磁传感器间磁场差值不受相关性环境磁场干扰影响的特性,联合采用三维舰船磁单极子阵列模型和磁场差值构建舰船磁源反演的线性方程组,并采用正则化技术进行求解。利用一艘虚拟典型舰船的磁场和相关噪声干扰,进行数值仿真验证实验,结果表明所提出的方法能够抑制和消除各种类型的相关磁噪声干扰,且不需要设置地磁参考传感器。因此,采用该技术能显著降低相应设施的建设成本,且选址和安装更加容易,具有重要的理论意义和实用价值。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
舰船科学技术(2021年12期)2021-03-29
华东师范大学学报(自然科学版)(2019年3期)2019-06-24
学校教育研究(2018年8期)2018-07-09
高中时代(2017年7期)2018-02-24
地震研究(2017年3期)2017-11-06
南方农业·下旬(2017年8期)2017-10-23
科技与创新(2014年8期)2014-07-17
环球时报(2009-09-16)2009-09-16
