
物联网机器人核心课程体系探索
2022-03-16 07:16赵学良郭迎九刘亚军
物联网技术 2022年3期
赵学良,郭迎九,刘亚军,周 波
(北京城市学院 信息学部,北京 100083)
0 引 言
物联网工程专业具有非常鲜明的新工科特征,属于前沿技术引领下多学科交融的新兴产业型专业。物联网工程专业融合了计算机、电子信息、自动化等多学科下的专业理论知识和实践技能,是现代社会泛在互联的必然产物。2010年教育部批准设置物联网工程本科专业之初就定位于服务国家战略和发展新兴产业需求,北京理工大学、北京科技大学等一大批“985工程”和“211工程”的学校开始了各具特色的创新性探索。根据已有资料和课题组长期的实地调查,各高校物联网专业培养学生的基本思路都是在已有的相关特色专业基础上,特别是在实践教学平台和师资方面,有所侧重地从物联网感知层、网络层或应用层的其中一层或两层出发的。
目前,物联网工程专业还在快速发展阶段,多学科交叉既是本专业的优势也是劣势。优势在于:学生几乎可以接触工程实现过程中所有云-边-端的技术和理论问题,能够极大地提升系统集成能力,具备“宽基础、厚口径”的特点;劣势在于:知识面过于宽泛,对师资、固定投资和学生的专业深度发展都提出了更高挑战。因此,及时总结物联网工程应用新领域对学科发展至关重要。近年来,智能机器人的快速发展为物联网工程的本地智能化带来了契机。物联网工程适应低成本和海量连接下的多传感器感知和传输,同时移动机器人可作为移动决策和判决的多任务中心,物联网机器人就是满足这两种需求而出现的新兴专业融合方向。
北京城市学院的物联网工程专业在经历了学科方向建设(2012年)、专业申报(2016年)、本科审核性评估(2019)、专业学位评估(2020年)等多轮论证、专业特色凝练、师资建设和实践教学设施建设之后,围绕智慧城市建设指导形成了智能服务机器人设计与维护和智能传感网规划与实施两大专业方向,逐渐形成了物联网机器人教学体系的完备基础。
1 物联网机器人的研究现状
在中国知网以关键词为“物联网机器人”进行检索,检索的结果如图1所示,可见物联网与机器人方向的融合报告整体呈上升趋势。王跃虎等利用物联网泛在网络和机器人可移动执行的特点对图书管理进行了早期探索。谭华等考虑到物联网的快速发展,认为物联网的WiFi、BLE等短距离通信技术将与智能机器人深度融合。秦松亭等通过ZigBee、WiFi构建了远近距离结合的消防机器人。胡琦瑶等提出了一种基于ZigBee数传和UWB定位的室内送水机器人,实现了低功耗的自动送水功能。张东涛等基于物联网定位技术提出一种具有割草机路径规划功能的物联网机器人,可实现全目标覆盖。张思源等建议利用物联网强大的感知和通信能力提升智能机器人的应用场景和性能,在微信小程序、WiFi、本地传感器模式基础上的扫地机器人被证明在远程监控时能保持较好的实时性和精度。
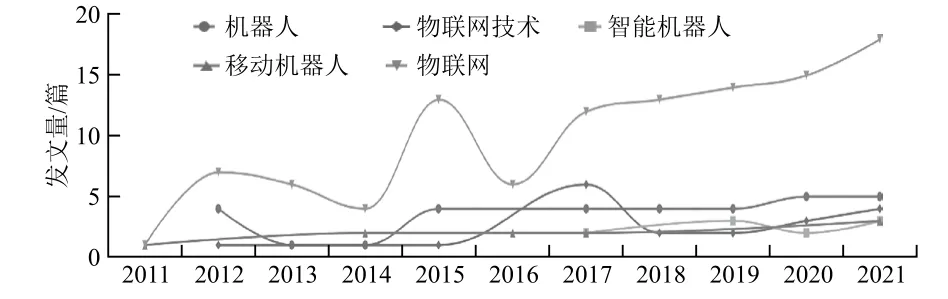
图1 物联网机器人主要研究主题发展趋势
关于物联网机器人的研究热点是把物联网的智能感知和强大的通信组网能力与机器人技术的感知定位和决策中心相结合,如图2所示。物联网常用短距离通信技术ZigBee、BLE和WiFi以及长距离通信技术LoRa和NB-IoT,组成泛在网络把数据通过网关上传至移动机器人,在机器人平台上进行融合处理和控制。
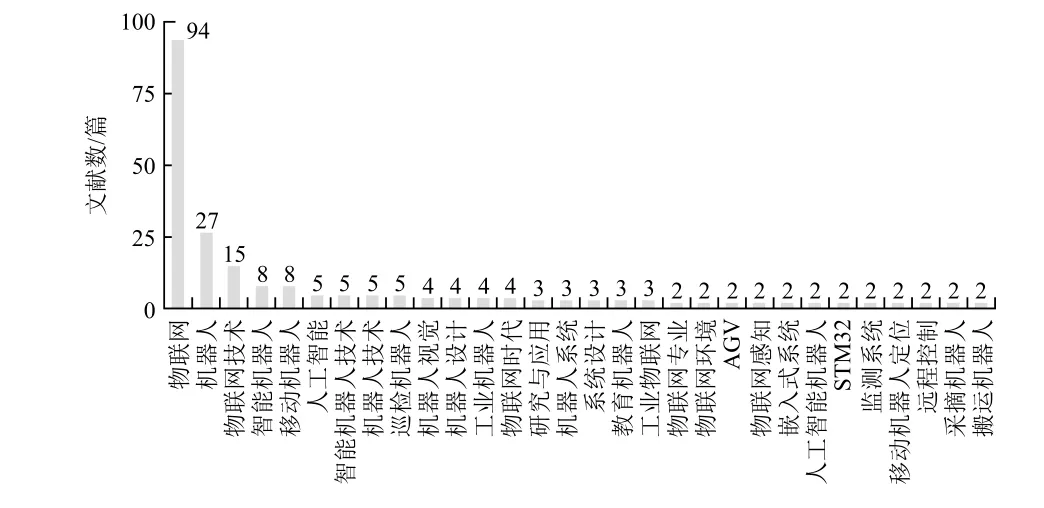
图2 物联网机器人研究和应用方向分布
2 物联网机器人核心课程体系探索
2.1 物联网专业核心课程体系
物联网专业核心课程按体系层次分为感知层、网络层、应用层。感知层包括RFID原理及应用、传感器原理与应用等相关课程,旨在培养学生的环境信号感知、变换的硬件设计与信息处理能力。网络层是关键层,包括无线网络原理、物联网通信技术、短距离和长距离通信技术等相关课程,旨在培养学生信号/信息传输、异构组网的能力。物联网专业的典型特征是多节点管理,因此本层节点应包含ZStack、Contiki等嵌入式操作系统。应用层包括定位技术、智能终端操作系统等相关课程,旨在培养学生应用系统方案设计能力。
2.2 机器人专业核心课程体系
机器人专业本身也涉及机电、计算机、自动化类课程的多学科交叉。机电类课程提供机器人本体及驱动,是机理建模的依据,此类课程包含机械设计原理、电机拖动等。计算机类课程包含嵌入式系统设计、单片机原理及应用、ROS、自然语言处理、计算机图像处理等,此类课程是让学生能够处理环境感知信息等。自动化类课程主要包含自动控制原理、计算机控制技术和智能控制等,主要使学生能够使用离散PID等基本控制算法及智能控制算法实现控制或决策。
2.3 物联网机器人核心课程体系
物联网机器人结合了物联网技术中的智能感知和机器人可移动可决策能力,因此专业培养需要在物联网多传感器感知、长短距通信技术、多节点管理的基础上,融合机器人所需的移动定位、智能判决能力。构建的核心课程体系如图3所示。在整个课程体系的配置上,物联网的感知、异构组网能力仍然处于核心位置,同时需要突出物联网机器人移动定位、控制与决策需求,其本质仍然是把机器人作为物联网技术的应用对象进行建设,机器人的地位等同于大数据、人工智能等新兴应用对象。
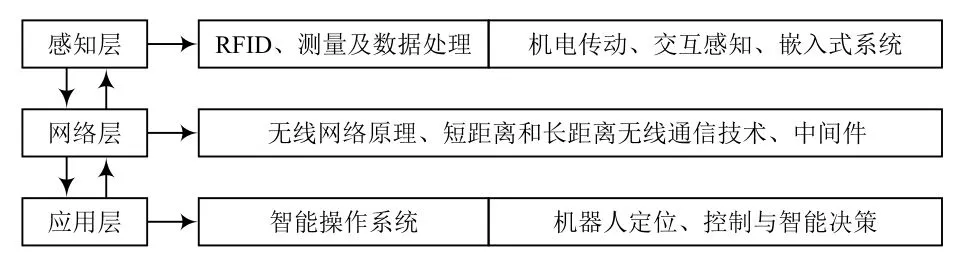
图3 物联网机器人核心课程体系
3 核心课程设置需权衡内容
3.1 云端智能和本地智能
云端智能的优点在于云端有近乎无限的算力,因此在云端使用人工智能得到的结果精度高;缺点在于有使用费、需要高速网络支持。本地智能的优点在于可根据需求降低算力、几乎无延迟;缺点在于算力一般较弱、一次性投资较高。因此云端智能适合网络条件好、对计算结果要求高、对时延要求不苛刻的场景;本地智能适合初期投资充裕、结果精度要求不高但对时延要求苛刻的场景,可考虑加入边缘网关。
3.2 定位技术
物联网机器人可移动,但机器人的移动控制比较复杂,包含了感知、建图、路径规划、导航、避障等。物联网机器人的移动一般为特定有限区域的移动,大多数是为确定感知区域内物品的位置或收发特定位置的数据,因此不必把机器人本体的绝对定位设置为重点,而应把重点放在RFID、BLE、ZigBee以及WiFi等短距离定位上。
3.3 功耗和成本控制
物联网机器人的控制和决策需求是根据物联网终端算力弱、功耗低的实际情况提出的,用于实现物联网多终端节点数据融合、智能判断、智能控制、智能决策和智能交互,优先考虑的是功能的稳定实现,功耗和成本控制次之。物联网机器人可进一步与人工智能融合,构成不同层次的嵌入式人工智能移动终端。当然,物联网机器人也可以按需求接入云端,实现云端训练与本地应用模式相结合的智能控制。
4 结 语
物联网机器人专业核心课程的精简必须充分考虑物联网智能感知和机器人能移动决策的特点,课程设置建议围绕检测技术、无线短/长距离通信技术、异构组网、移动定位和智能判决这五个方向进行。物联网行业正在快速发展和变革中,其本身有强大的包容和数据驱动能力,物联网机器人核心课程设置也应根据专业发展实际情况进行微调。
猜你喜欢
党的生活(黑龙江)(2022年4期)2022-04-25
导航定位与授时(2020年5期)2020-09-23
铁道通信信号(2020年9期)2020-02-06
通信世界(2018年27期)2018-10-16
知识经济·中国直销(2018年3期)2018-04-12
辅导员(2017年18期)2017-10-16
中国法学教育研究(2017年2期)2017-05-30
学习月刊(2015年1期)2015-07-11
浙江理工大学学报(自然科学版)(2015年8期)2015-03-01
风能(2015年10期)2015-02-27
