
一种严密的高精度自由设站方法研究
2022-03-16 12:33郑子天王国祥陈海军倪先桃
高速铁路技术 2022年1期
郑子天 刘 畅 王国祥 陈海军 倪先桃
(1.中铁二院工程集团有限责任公司, 成都 610031;2.四川铁拓科技有限公司, 成都 610031)
随着智能型全站仪在铁路工程测量中的广泛使用,自由设站法[1]以其便捷、快速、高效、灵活性好[2]等特点,在底座板施工、道床板精调、长钢轨精调等铁路线施工测量中得到了大量应用[3]。赖鸿斌[4]等通过分析,发现全站仪加常数对CPⅢ平面平差精度影响显著;郑子天[5]等提出了一种全站仪加常数测定方法;中铁二院工程集团有限责任公司[6]、四川拓绘科技有限公司[7]研究了乘常数对全站仪自由设站的影响,发现乘常数主要影响平面距离改正数;罗刊等对高程设站模型进行了研究,提出了一种提高高程设站精度的模型[8];四川拓绘科技有限公司对自由设站进行了深入研究,提出了一种基于双盘位的自由设站方法[9];马洪磊等对自由设站进行了研究,主要讨论了其在平面控制网测量中的应用[10];胡菊英等对自由设站法及其精度进行分析[11],肯定了全站仪自由设站法的可行性及优越性;王洪斌等介绍了自由设站在铁路测量控制网中的应用[12],分析了自由设站所获得的数据质量;王磊[13]和罗远刚[14]等研究了三维平差在高速铁路测量中的应用,实现了自由设站由二维到三维的转变。
虽然已有众多学者对自由设站进行了研究,但研究全站仪各类误差来源及其对自由设站精度影响成果却鲜有见到,基于此,笔者深入研究了全站仪各类误差及其相应的提高自由设站精度的方法,以提高设站精度和效率。TB 10601-2009《高速铁路工程测量规范》[15]规定,当自由设站设站精度、坐标残差等指标超限时,需人工进行超限点剔除,然后重新计算直到所有指标符合规范规定。全站仪有显著的加常数、乘常数、竖盘指标差等系统差,会造成设站点的精度不良,同时引起设站坐标与理论坐标之间的差异,从而影响设站成果的正确性。本文通过对全站仪加常数、乘常数及竖盘指标差等进行分析,以不同的方法消除各种系统误差对自由设站的影响,通过定权模型实现了选点自动剔除,从而实现高精度自由设站。目前,自由设站通常采用全站仪自带程序,本文所述方法对全站仪竖盘指标差等硬件指标的要求比全站仪自带程序低,在同等情况下可获得更高精度的自由设站成果。
1 一种严密的高精度自由设站方法研究
测量平差[16]研究的主要对象是偶然误差,即总是假定剔除含粗差的观测值,适当改正含系统误差的观测值。因此,在进行自由设站前,要确认观测值是否包含系统误差、粗差等,若包含则应进行预处理。
1.1 全站仪加常数对自由设站的影响
为研究全站仪加常数对自由设站的影响,以某站未加加常数为基础网数据,对其增加2 mm的加常数常量作为对比网进行数据分析。
(1)基础网与对比网的设站平面坐标差异很小。
(2)自由网平差计算时,对比网的尺度因子[6]绝对值为17,远大于0。
(3)约束网平差后,对比网距离改正数均值为-2 mm,最大改正数已超过《高速铁路测量规范》的距离限差要求。
从以上分析可以看出,全站仪加常数对自由设站影响显著,应将其作为系统误差考虑。
1.2 全站仪乘常数对自由设站的影响
为研究乘常数对自由设站的影响,以某站未加乘常数为基础网数据,对其增加10 mm/km的乘常数作为对比网进行数据分析。
(1)基础网与对比网的设站平面坐标差异很小。
(2)自由网平差计算时,对比网的尺度因子绝对值为10,远大于0。
(3)约束网平差后,对比网距离改正数均值为-0.9 mm。
从以上分析可以看出,乘常数是一项系统误差,应在计算前对乘常数进行改化,再利用处理后的数据进行自由设站。
1.3 竖盘指标差对自由设站的影响
在自由设站中,全站仪加常数及乘常数主要影响平面设站精度。高程也是自由设站的一部分,由于自由设站通常采用单盘位设站,竖盘指标差不能消除或削弱,因此竖盘指标差对设站的高程影响显著。由文献[8]可知,竖盘指标差应控制在3″以内,以便更易满足轨道精调换站搭接限差2 mm的要求。
为获取全站仪竖盘指标差的分布规律,分析了10个项目CPⅢ数据的竖盘指标差,每个项目随机选择一台仪器,竖盘指标差分别为1.2″、3.5″、1.6″、-0.4″、-9.2″、3.1″、-0.2″、-7.8″、-6.1″和13.7″。从以上数据可知,竖盘指标差有正有负,绝对值大于3的比例占了60%,因此采用单盘位设站计算高程时,需考虑竖盘指标差。若全站仪的竖盘指标差过大,可事先测定全站仪的竖盘指标差,计算时先进行此项修正。
1.4 严密的高精度自由设站方法
全站仪系统误差对设站精度影响显著。在实际测量中,应采用各种方法消除或减弱系统误差的影响[11],使其影响达到可以忽略不计的程度。因此,应在观测方法和观测程序上采取必要的措施来限制或削弱系统误差的影响,通常利用已有公式或推算公式对观测值进行系统误差改正,即数据预处理;对不容易评价或测定的系统参数,可将系统误差当作未知参数和偶然误差纳入平差函数模型中,一并解算。基于以上原理,本文提出一种严密的高精度自由设站方法,其流程如图1所示,具体步骤如下:

图1 一种严密的高精度自由设站方法流程图
(1)选取进行设站的全站仪,并对全站仪加常数进行测定,并将其作为系统误差对后续测量数据进行预处理。
(2)利用全站仪瞄准并测量两个后视点,获取设站点的近似坐标,并采用单盘位测量方式获取所需观测的其余后视点的观测数据。
(3)构建基于竖盘指标差和乘常数为参数的严密三维平差模型。
(4)根据步骤(2)中每一个后视点的观测数据和步骤(3)中基于竖盘指标差和乘常数为参数的三维平差模型计算设站点坐标、设站点定向角和竖盘指标差。
(5)根据步骤(4)计算得到的设站点坐标和竖盘指标差进行自由设站。
在实际的生产中,关键步骤(1)可参考文献[5]的方法进行野外全站仪加常数测定,并将测定的加常数输入到全站仪中,采用既有公式对加常数进行预处理。
根据部分文献及某品牌轨检小车操作说明要求,配套全站仪竖盘指标差应小于2″或3″,因此,在步骤(3)中,降低外业测量对全站仪的要求,本文构建了基于竖盘指标差和乘常数为参数的严密的三维平差模型,如式(1)所示。
(1)
式中:XC、YC、HC——设站点的坐标;
X、Y、H——后视点的设计坐标;
S——后视点到设站点的实测斜距;
K——乘常数;
TL——设站点到后视点的天顶距;
L——设站点到后视点的水平角;
A——设站点的定向角;
k——大气折光系数;
R——地球曲率半径;
i——竖盘指标差。
将步骤(2)中获取的每一个后视点的观测数据代入三维平差模型,通过多组数据计算设站点坐标和竖盘指标差。
为进一步提高设站精度,构建定权[17]模型,如式(2)所示。根据后视点设计坐标与平差坐标之差进行定权迭代计算,直到权不再变化,得到设站点的三维平差,从而计算设站点的精度。
(2)
式中:Pi——权;
vi——后视点设计坐标与平差坐标之差,vi=abs(Ki-Ki0);
Ki——后视点的设计坐标;
Ki0——后视点的平差坐标。
在第一次平差后,将后视点设计坐标与平差后由三维平差模型计算得到的平差坐标的差值,根据定权模型重新定权。CPⅢ建网与复测的坐标较差限差[15]为±3 mm,故将较差±3 mm以上的点作为粗差点,其权重为0,从而实现削弱粗差的目的。本文通过定权模型[17]进行定权处理,能够实现自动化剔点,使所有的数据起到应有的作用,使误差越大的点贡献越小,从而使得设站点结果唯一。通过后视点设计坐标与平差坐标的差值计算设站点精度的计算如式(3)所示。
(3)
式中:σ0——设站点的精度;
n——后视点的个数;
i——后视点的序号。
为减小观测精度对单次计算竖盘指标差造成的影响,本文要求在多次计算竖盘指标差后取均值进行每天数据事后计算,以削弱竖盘指标差的波动,提高设站高程的准确性。
2 应用分析
某铁路隧道因地震引发无砟道床板上拱,给铁路运营安全带来了隐患。为获得高精度轨面高程,为隧道整治提供基础数据,轨道测量要求精度达到2 mm,因此设站成果必须准确可靠。采用全站仪测量了8个后视点观测值,如表1所示,后视点的设计坐标成果如表2所示。根据全站仪自带程序原始观测值未改化计算的设站坐标及采用本文所述方法进行附加参数计算的设站坐标不符值如表3所示。坐标不符值是指后视点设计坐标与设站坐标之差。
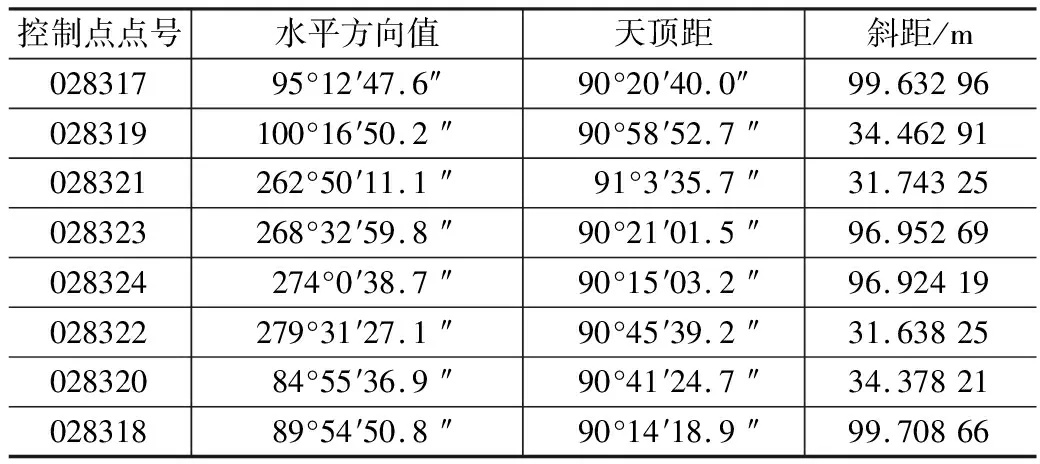
表1 后视点观测值表
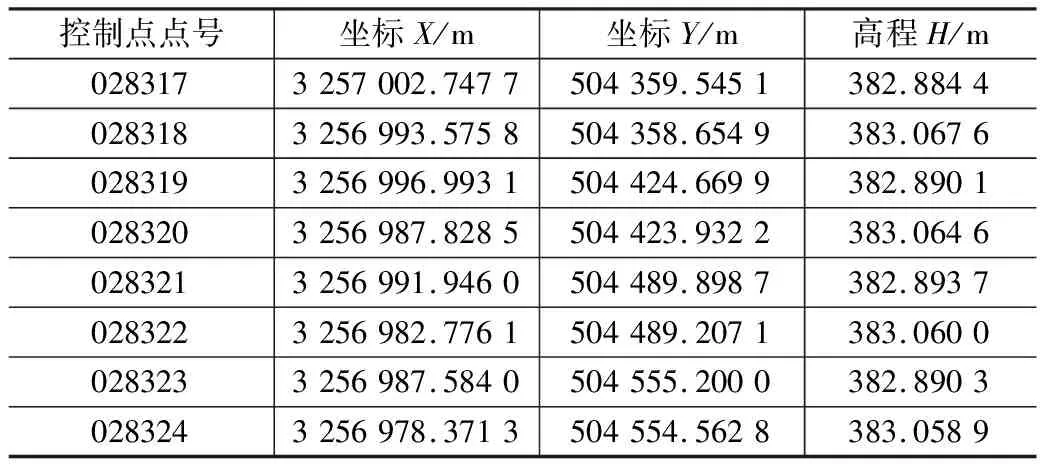
表2 后视点的设计成果表
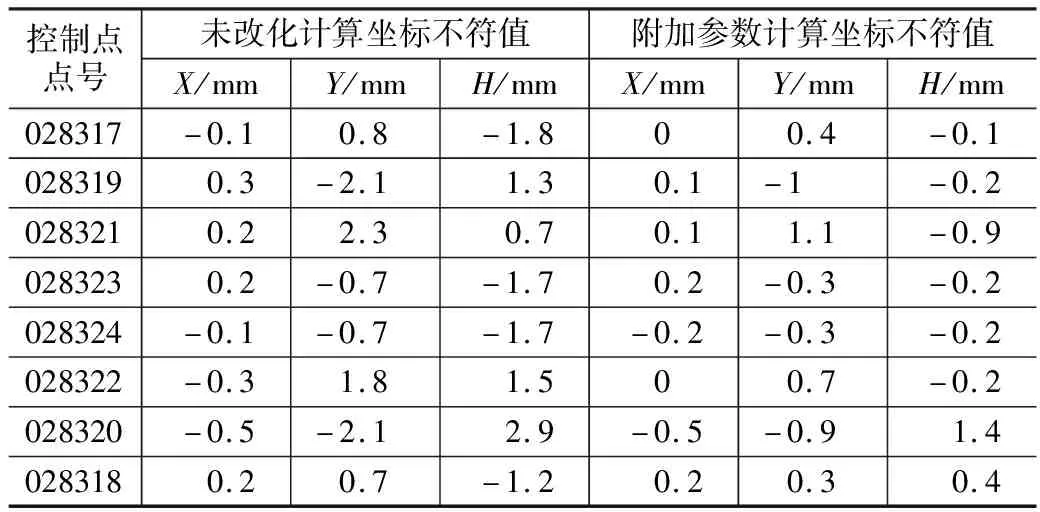
表3 未改化计算及附加参数计算坐标不符值表
根据全站仪自带程序设站与本文方法,设站的结果分别为(3 256 989.368 4,504 458.269 6,383.481 6)、(3 256 989.368 4,504 458.269 7,383.478 4)。从设站结果及表3可以看出:附加参数计算的坐标不符值明显优于未改化的坐标不符值结果,未改化坐标不符值部分超过2 mm;附加参数计算的设站坐标绝对值与未改化的设站坐标基本一致,影响较小;竖盘指标差对设站点高程影响较大,高程不符值部分超过2 mm,改化前后设站点高程较差为3.2 mm,超过了文献[15]关于站与站搭接的设站精度要求,影响了测量的正确性。根据式(3)计算两种设站方式的设站精度分别为(0.10,0.59,0.64),(0.08,0.27,0.24)。因此,本文提出的自由设站方法不仅坐标不符值满足规范要求,设站点的点位精度也有所提高。
从以上应用数据分析可知,该全站仪竖盘指标差较大,若直接采用全站仪自带程序设站,其高程测量精度不能满足轨道测量要求,需按本文提出的方法进行自由设站。本文提出的方法可降低全站仪竖盘指标差要求,从而提高全站仪的适用性。
3 结束语
本文通过对全站仪自由设站的深入研究,分别采用不同的处理方法对各种误差进行分析和处理。对于能快捷测定的系统误差通过外业现场测定系统消除,对于不易测定的系统误差和偶然误差通过附件参数的平差方式消除,对于粗差采用定权迭代的方法削弱,从而完善了现有的铁路轨道控制网平差体系。
本文通过对仪器设备的各种误差进行分析,建立了全站仪自由设站的严密计算模型,理顺了CPⅢ轨道控制网测量到应用的关键环节,为高质量应用CPⅢ控制网奠定了基础,对规范修编具有参考意义。
本文提出的一种严密的高精度自由设站方法,降低了竖盘指标差必须小于2″或3″的挑选标准。在绝对轨检小车与惯导轨检小车的使用过程中,建议采用本文推导的模型,打破传统设站对全站仪自带程序设站的依赖,从而提高全站仪的适用性。
猜你喜欢
新型工业化(2022年5期)2022-06-17
矿产勘查(2020年1期)2020-12-28
水电站设计(2020年4期)2020-07-16
北京航空航天大学学报(2017年4期)2017-11-23
中学生理科应试(2017年2期)2017-04-01
现代职业教育·中职中专(2016年4期)2016-10-21
环境(2016年7期)2016-05-14
新闻前哨(2015年2期)2015-03-11
中国校外教育(上旬)(2009年6期)2009-08-04
