
基于FAHP与TOPSIS法的老年体验式陪护机器人设计评价及应用
2022-03-19 21:49郭皓月侯幸刚
设计 2022年4期
郭皓月 侯幸刚

关键词:用户体验理论 老年体验式陪护机器人 逼近理想解排序法 层次分析法产品设计优选
引言
国家老龄化趋势越来越严重,空巢群体增长,调研发现孤独是老年群体主要现状[1] 。这部分老年群体需要陪护机器人分担在外子女的责任,对现有陪护机器人调研,发现多数都处在语音、定时提醒等机械性功能,对老年人身体盘查检测,娱乐交互等方面处于初级阶段。经过对老年用户体验满意度调研[2] ,49%用户对市面老年陪护机器人不满意。因此针对老年人设计一款陪护机器人,以用户体验理论为基础,综合运用FAHP法与TOPSIS法对设计方案进行科学分析与优选。
一、方法运用分析研究
(一)老年体验式陪护机器人现状分析:目前老年体验陪护机器人发展势头迅猛,是各服务设计领域的研究重点[3] 。人口衰老化与空巢现象对社会发展呈现后劲不足的趋势,因此老人的身心和生理健康是首要问题[4] 。
(二)用户体验理论:用户体验是产品给使用群体的视觉触觉听力的互动印象[5] ,其核心是用户为中心,分战略层的用户需求、范围层的功能,结构层的界面,表现层的外观,此款机器人从战略层,范围层与表现层分析。
(三)模糊层次分析法:层次分析法可对多因素问题进行梳理[6] ,根据用户需求,确定设计因素进行模型构建,计算数值。但层次分析法存在专家想法打分的主观意向,为增加方案判断严谨性,引入模糊理念对问题进行量化。
(四)TOPSIS 分析法:TOPSIS是梳理设计方案的多领域普适性实用判断方法[7] 。TOPSIS 法先对初始矩阵进行归一化与标准化处理,然后计算数据正负理想解,算出各评价指标与正负理想解的距离进行排序选出最优方案[8] 。TOPSIS法能对设计指标标准化处理并排序,但对指标数据计算不擅长,无法准确计算指标权重。
二、基于FAHP法的陪护机器人方案模型建立与评价
通过用户体验和调研问卷,为陪护机器人方案设计提供参考,从生理、心理方面分析,老年人生理需求有饮水、日常出行、记忆、饮食、作息,娱乐、打扫,心理需求主要是定时检查身体,易感到孤独,希望有人照顾日常生活。接着基于F AHP 与 TOPSIS 的方法流程展开,设计老年陪护机器人。先分析机器人设计要素,建立指标体系,构建判断矩阵,接着对判断矩阵进行一致性检验,是否合理,然后通过专家打分建立模糊综合评价体系,构建模糊矩阵并标准化,确定最优方案,对设计方案进行正负理想解贴近度排序,计算方案与正负理想解距离,构建综合模糊评价矩阵,最后打分评判方案与设计点。
(一)陪护机器人设计要素选择
在机器人设计方案优选中,用用户体验理论中的范围层、战略层以及表现层构建下属11项评价设计因素。范圍层是功能因素,战略层为体验因素,表现层为外观要素,因此准则层合集为E={B1,B2,B3}。
(二)确定最终评价层次模型
通过调查问卷以及对40位用户进行访谈,收回可用问卷36份,求各指标的数据得分值,公式为O=P/36(1)其中 O为实用性值,P为调研人群。最终确定11个次准则层设计要素,B1范围层包括,C1安全监护,C2智能拨打救援电话,C3功能简洁,C4体测自助检测不适,B2战略层包括,C5语音辨别,C6自动检测故障,C7记忆功能,B3表现层包括,C8外观造型,C9色彩,C10材质,C11屏幕。
(1)根据分析最终选择11种设计点。安全监护,老人出现心脏或脑血管类的病况,机器人摄像头随时监控老年人,系统自动报警[10]。(2)智能拨打救援电话。传统机器人无法全方位照料老年人,现将机器人安装记忆功能,家里人设定好程序号码当老人出问题时可根据储存报警号码呼叫。(3)功能简洁。老年人不懂互联网,机身少功能与简约界面为主要因素。(4)体测,自助检测不适。机器人定期对用户进行身体检测,通过屏幕显示动画健康检测状况并语音播报。(5)语音辨别。机器人录入主人声音,当年轻人出门老人无法应对情况时,机器人便根据语音辨别人群是否亲近,并作出回答,如快递敲门,机器人问信息,若回复送快递,机器人回复人不在请另选时间派送,由它传达信息。(6)自动检测故障。陪护机器人具备自身检测系统状况的能力,语音提醒主人。
(7)记忆系统功能。在机器人系统中输入老人吃药身体检查等操作,根据主人平时吃药、测量身体时间到点提醒老年人检查。(8)外观造型。
老年人大都喜欢简约造型(9)色彩。色彩的简约低调是调研发现老年人的喜好。(10)材质,老年人会在无法预测的情况下对机器人进行伤害,因此需要坚硬的外壳。(11)屏幕,屏幕功能和图示简洁有趣,用箭头和人物引导用户操作。
(三)构建成对比较矩阵
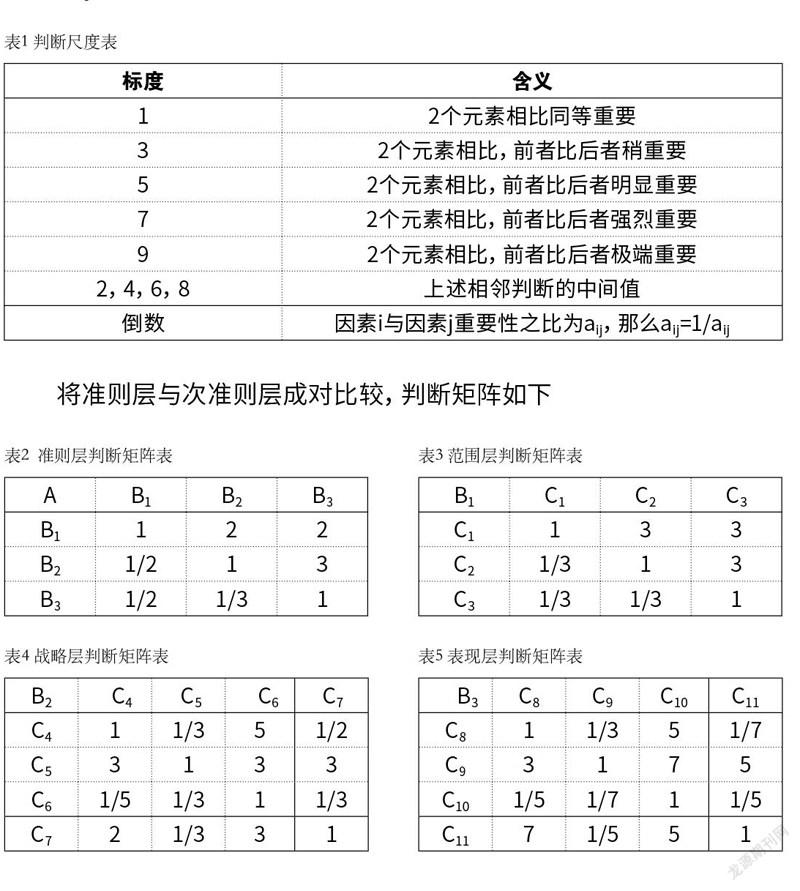
由N名专业人员打分构成评价指标集合 Q={Q1,Q2,···,QG},对各项评价要素用 1~9 的评价取值定义。得到成对比较矩阵值aij,其中aij为要素i对于j的量化值。层次分析的判断标度下表1。
三、基于TOPSIS法的老年体验式陪护机器人方案优选与排序
TOPSIS法依据设计方案与最接近理想化程度的距离远近并排序来判断方案的合理程度。对方案决策评价具有高度适用性。
(一)建立原始评价矩阵
设有H个待评价方案,组成集合A={A1,A2,...Ai,};有I个评价因素组成集合M={M1,M2,...Mi,};建立评价要素对应指标为Vij(i=1,2,...,m;j=1,2,...,n),j建立原始评价矩阵
(二) 评价矩阵数据标准化处理
评价指标分为极大、极小型等为方便量化计算,统一为极大型(效益型)指标,去除不同单位量纲的影响,方便统一运算。从分析可知,C1-C11全部为正向化指标。
四、运用TOPSIS法对各方案进行综合评价及排序
(一)打分人员及其评价数据
邀请设计师,教师生产商和用户各5名,对指标打分。主要研究适老化机器人方向,对使用体验进行打分。评判区间为0到10分,0-3分很差,3到5分差,5到6分一般,6到8分良好,8到10分为优秀。
将打分数据用算数平均法获取最后计算得分,组成原始评价要素矩阵。参考公式(5)算出A方案C1=6.49,C2=6.49,C3=6.49,C4=7.39,C5=6.87,C6=7.96,C7=8.23,C8=6.55,C9=7.18,C10=7.56,C11=7.27.方案B的C1=6.25,C2=6.34,C3=6.17,C4=7.09,C5=6.67,C6=7.25,C7=7.79,C8=6.14,C9=6.19,C10=7.89,C11=7.91.方案C的C1=6.48,C2=6.23,C3=6.29,C4=7.38,C5=7.01,C6=6.59,C7=6.89,C8=6.93,C9=7.79,C10=7.93,C11=6.03.
(二)原始矩陣进行标准化处理
根据公式(6)-(8)对上述原始矩阵数据表进行标准化处理。得到标准化矩阵得分数据,方案A中C1=C2=C3=0.273,C4=0.31,C5=0.289,C6=0.335,C7=0.347,C8=0.28,C9=0.302,C10=0.318,C11=0.306,方案B中C1=0.273,C2=0.277,C3=0.269,C4=0.309,C5=0.291,C6=0.316,C7=0.340,C8=0.268,C9 =0.270,C10 =0.34 4,C11=0.345,方案C中C1=0.283,C2=0.272,C3=0.275,C4=0.323,C5=0.307,C6=0.288,C7=0.301,C8=0.303,C9=0.341,C10=0.347,C11=0.264
(三)标准化矩阵的加权处理
根据公式(9)-(10),得出加权标准化矩阵,方案A=(C1=0.082,C2= 0.094,C 3 = 0.059,C4 = 0.03,C 5 = 0.029,C6= 0.08 4,C7= 0.02,C 8 = 0.01,C9 = 0.19,C10 = 0.031,C11= 0.03 8)方案B =(C1= 0.0 82,C2=0.095,C3=0.06,C4=0.03,C5=0.029,C6=0.08,C7=0.02,C8=0.08,C9=0.018,C10=0.032,C11=0.043)方案C=(C1=0.085,C2=0.094,C3=0.059,C4=0.031,C5=C6=0.031,C7=0.18,C8=0.01,C9=0.22,C10=0.32,C11=0.033)。
结束语
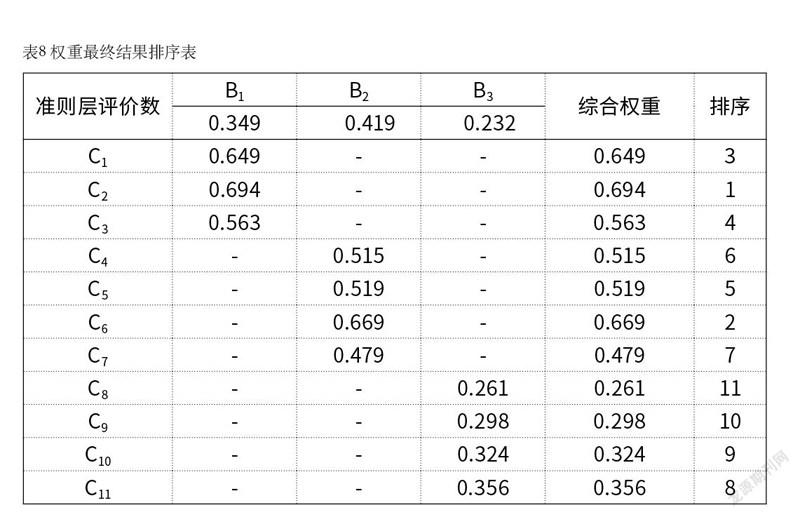
为预防设计方案的局限性,从设计方案的科学、实用等角度出发,提出了F AHP 与 TOPSIS 共用的方法完成对多个机器人方案选择分析,根据用户体验,确立老年陪护机器人的层次模型并进行权值计算。并运用 FAHP 法与 TOPSIS 法对3个方案进行排序。通过数据验证排查结果证实,运用 FAHP 和TOPSIS 对老年体验式陪护机器人设计方案优选可行,这两个方法的结合可为老年陪护机器人设计方案优选提供参考。更合理挖掘用户需求,进行老年陪护机器人的创新设计。但也有缺陷之处,由于老年机器人设计的不确定性与复杂性,主要由专家打分,没有更合理的依据,后面会更科学改进研究方法来深入老年体验式陪护机器人的设计研究。
1827501705358
