掘进机行走系统模糊控制策略的设计
2022-03-24 06:46曹辉
机械管理开发 2022年1期
曹 辉
(山西焦煤集团有限责任公司屯兰矿, 山西 太原 030206)
引言
掘进过程为煤矿生产的主要环节,掘进效率决定整个煤矿的建设周期,掘进质量决定巷道的成型质量,最终影响着工作面的回采效率和安全性。目前,传统的掘进机行走控制系统主要通过操作人员的肉眼观察并结合经验来对其进行手动纠偏控制,以保证掘进机行走在正确的轨道上。但在由于工作面能见度低、操作人员的个人经验和精力均存在差距,使得在实际生产中存在手动纠偏不到位或者过位的情况,进而导致欠挖和过挖的现象发生[1]。为此,本文主要以掘进机行走驱动系统为例展开研究,基于模糊控制算法实现对行走轨迹的跟踪控制。
1 掘进机行走系统概述
掘进机行走系统的主要执行部件为履带,其能够实现掘进机设备的前进、后退和转向,可保证控制系统对掘进机液压马达进行准确、实时控制,同时可保证履带在正确的轨道上运行,实现掘进工作面的无人值守。常规掘进机行走系统的结构如图1 所示。
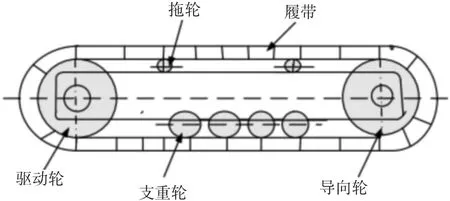
图1 掘进机行走系统组成图
由图1 可以看出,掘进机行走系统由驱动轮、导向轮、支重轮、拖轮以及履带组成。掘进机行走系统主要依靠液压系统进行控制,其左右两侧存在两个独立对称的液压控制系统。液压马达为行走系统的动力源,通过对比例换向阀的左位、右位以及中位三个位置进行控制,可实现对单侧履带的前进、后退以及静止三种工作状态的控制。此外,液压控制系统中采用单向阀,以避免液压油的回流;采用溢流阀对液压系统线路进行保护,以避免超压状态下系统出现故障。同时,对比例换向阀左位和右位阀门开度大小进行控制,可实现对液压油流速的控制,从而实现对行走速度的控制[2]。
当左右两侧比例换向阀处于相同的位置且阀开度大小一致时,掘进机处于前进或者后退的运行状态。当左侧阀口的开度大于右侧阀口时,掘进机向右转向运行;反之,掘进机向左转向运行。
2 掘进机行走轨迹的跟踪控制
掘进机在实际掘进过程中,由于工作面不可预知的因素较多,因此掘进设备必须根据实际情况,对掘进方向、速度等进行实时控制,以保证设备按照预定轨迹运行。一般情况下,应保证掘进机按照巷道的中线运行,只有保证掘进机在巷道的中线位置运行,才能避免巷道出现欠挖或者超挖的情况。
为保证掘进机行走轨迹按照预定轨道运行,需保证设备的位置偏差、方位角偏差、距离偏差及横纵坐标偏差不超过相关标准规定要求,其中对位置和方位角偏差的控制尤为重要。根据《煤炭安全规程》的规定,要求掘进机运行轨迹偏移巷道中线的距离不得超过0.05 m;要求方位角的偏差不超过0.05 rad。
掘进机行走轨迹的跟踪控制:根据巷道的定位精度、施工方法、施工精度以及巷道的地质条件,对掘进机左右行走系统的速度进行控制,从而保证设备能够按照预定轨迹或者巷道中线运行。实践表明,采用传统的控制理论无法保证掘进机能够实现精准的轨迹跟踪控制,且在突发情况下,对掘进机行走方向的控制存在滞后性。为此,本文基于模糊控制算法,以掘进机的位置偏差和方位角偏差为输出,对掘进机左右行走系统履带的速度差进行控制,以此保证掘进机按照预定轨道运行[3]。同时,采用模糊控制算法实现了对掘进机左右履带速度叉的闭环控制,对应的控制系统框图如图2 所示。
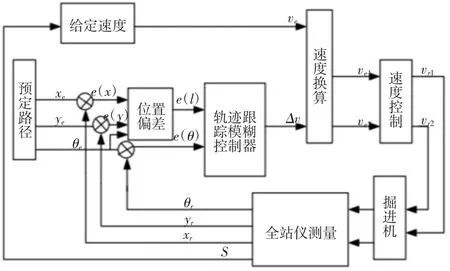
图2 掘进机行走轨迹跟踪控制模糊控制框图
由图2 可知,基于全站仪对掘进机在巷道的位置、横纵坐标以及方位角进行测量,将其与预定轨迹的横纵坐标和方位角进行对比,得到e(l)和e(θ);掘进机轨迹跟踪模糊控制器以e(l)和e(θ)为输入,得出左右两边履带的速度差;再结合当前掘进机左右履带的运行速度、实时位置和预定轨迹,将左右履带的运行速度分别调整至正确值,最终保证掘进机处于预定轨迹运行。
3 掘进机行走系统控制策略的设计与仿真
3.1 掘进机行走系统控制策略的设计
掘进机行走系统控制策略是在操作人员对掘进机驾驶经验的基础上,结合掘进机的行走特点制定的掘进机行走系统控制策略,具体如下:
1)当掘进机的实际行走轨迹与巷道中线位置及方位角的偏差较大,且掘进机的整体运行方式朝着预定轨迹运行时,对应的控制策略为:控制掘进机左右履带在较小的速度差或者零速度差下运行,使得掘进机尽快回到预定轨迹[4]。此时,对应的掘进机位置偏差和方位角偏差为异号。
2)当掘进机的实际行走轨迹与巷道中线位置及方位角的偏差较大,且掘进机的整体运行方式背离预定轨迹运行时,对应的控制策略为:控制掘进机左右履带在较大的速度差下运行,确保掘进机尽快转向回到预定轨迹。此时,对应的掘进机位置偏差和方位角偏差为同号。
3)在巷道中线的位置和方位角两个参数中,当掘进机实际行走轨迹与其中一个参数的偏差较大,且与另一个参数偏差较小时,对应的控制策略为:控制掘进机左右履带在较小速度差或中等速度差的状态下运行,保证掘进机平稳回到预定位置。
3.2 掘进机行走系统控制策略的仿真分析
为验证上述模糊控制策略的效果,本文基于Simulink 软件建立掘进机行走控制系统的模糊控制模型,模型中包括有预定轨迹模块、位置偏差模块、轨迹跟踪模糊控制器模块、速度换算模块、速度模糊控制模块以及车体运动模块等。在仿真模拟中,设定一条半径为15 m 的曲线和直线相结合的巷道,设定仿真时间为100 s,仿真的采样周期为0.5 s。在直线段和曲线段的掘进机的位置偏差和方位角偏差的仿真结果如表1 所示。
由表1 可知,基于本文所设计的模糊控制算法对掘进机行走轨迹的跟踪控制过程中,在直线段的绝对值最大位置和最大方位角偏差分别为0.019 m和0.02 rad;在曲线段的绝对值最大位置和最大方位角偏差分别为0.039 m 和0.03 rad。仿真结果均满足《煤炭安全规程》中规定的掘进机运行轨迹偏移巷道中线的距离不超过0.05 m,方位角的偏差不超过0.05 rad 的要求[5]。
4 结语
掘进机作为煤矿掘进的关键设备,掘进效率和掘进质量直接决定巷道的掘进速度和后期巷道的成型质量,进而影响最终工作面回采的安全性和效率。为保证掘进机能够按照预定轨迹对巷道进行掘进,保证巷道的成型质量,基于模糊控制算法设计的掘进机行走系统的轨迹跟踪控制策略经仿真分析可知,该系统的轨迹跟踪控制精度满足《煤炭安全规程》的相关标准要求,可在实际生产中推广应用。
猜你喜欢
西部探矿工程(2022年8期)2022-08-08
结构工程师(2022年2期)2022-07-15
科学与财富(2021年33期)2021-05-10
兵器装备工程学报(2021年3期)2021-04-09
空间科学学报(2020年4期)2020-04-22
现代计算机(2018年19期)2018-08-01
中学生数理化·七年级数学人教版(2017年1期)2017-03-25
中国新技术新产品(2016年20期)2016-12-08
山东工业技术(2015年21期)2015-11-04
科技视界(2014年6期)2014-12-24