
微动探测方法研究及应用
2022-03-28 07:27汶小岗
陕西煤炭 2022年2期
王 辉,汶小岗,2,李 亮,乔 会
(1.陕西省煤田物探测绘有限公司,陕西 西安 710005;2.自然资源部煤炭资源勘查与综合利用重点实验室,陕西 西安 710026)
0 引言
微动探测技术可以分为微动单点测深以及微动二维剖面探测2种。在实际勘探中,对于2种方法的选择,应根据探测目的及2种方法自身的特点来确定[1-3]。
微动单点测深是从微动信号中提取频散曲线,然后给定一个初始模型,模型信息包括层数、各层厚度、泊松比、S波速度范围等,通过反演得到勘探区下方的S波速度结构。
微动二维剖面探测是从各个单点提取频散曲线后,对各个单点给定初始模型,然后进行反演,得到单点下的速度-深度模型,再将所有单点的速度值进行内插,通过插值光滑处理连成剖面,获得勘探区下方的速度-深度剖面。相对于单点测深,二维剖面能清楚、直观地反映出地下地层的变化以及不良地质体等,便于对地下介质结构进行分析[4-6]。
1 微动勘探原理
通过从天然源微动信号中提取面波的频散曲线,然后假定计算的初始模型进行反演,进而求得相对应的S波的速度,得到地下单点S波速度结构或S波速度剖面。从微动信号中提取面波(瑞雷波)频散曲线的方法主要有SPAC法(空间自相关法)、F-K法(频率-波数法)及H/V法(谱比法)等[7-8]。空间自相关法对于微动台站的布设要求比较严格,各个台站需均匀布设在同心圆的圆周之上,圆心处同时布设台站,在野外障碍物较多的复杂地形以及城市地形的情况下,很难满足要求[9]。因此在空间自相关法的基础上,对该方法进行了改进扩展,得到了扩展空间自相关法(ESPAC法),ESPAC法对于台阵的布设无特殊要求,简单灵活,对于复杂地形的适应能力更好[10]。F-K法的台阵布设也相对灵活,但需要布设数量较多的台阵才能满足要求,在目的层较深的情况下,需要的台阵数量大,施工难度增加。
1.1 空间自相关法(SPAC法)
空间自相关法微动观测台阵要求将各个接收点均匀的布设在圆周之上,同时在圆心处也布设接收点。使用SPAC法进行频散曲线提取,假设微动勘探过程是一个平稳随机的过程[11],且微动信号是以固定速度传播的微动波。
μ(x,y,t)=∑∑Anmexp(ikncosθm+
iknyscosθm)sin(ωnt)
(1)

波在t时刻的空间自相关函数φ(ξ,η,t)可以定义为

(2)
微动信号的振幅随着时间t位置的变化而变化,但是其统计性质关于时间是不会变化的。在理想情况下,微动空间自相关函数的系数定义为
(3)
式中,J0(χ)为第1类零阶贝塞尔函数;k为波数;c(ω0)为角频率ω0的面波相速度,即
(4)
空间自相关法通过获得角频率ω0不同时刻的空间自相关系数,即可获得频率不同的面波传播速度c(ω0),进而获得瑞雷波的频散曲线。
1.2 扩展空间自相关法(ESPAC法)
ESPAC法(扩展空间自相关法)的台阵布设相较于空间自相关法更为灵活,其可以布设为任意形状,如十字型、内嵌等边三角型(多重圆型)、L型、直线型等。
空间自相关法是保持圆周半径不变,改变频率,得到自相关系数随频率的变化关系;而扩展空间自相关法是保持频率不变,改变圆周半径,计算自相关系数并与贝塞尔函数拟合,求得自相关系数随距离的变化关系[12-13]。不同半径下频率为f的空间自相关系数S定义为

(5)
(6)
式中,r0n为所改变的半径;r0对应第1类零阶贝塞尔函数J0;n为所改变的半径数;E为拟合误差。
1.3 频率-波数法(F-K法)
F-K法的台阵布设相对也比较灵活,但是该方法需要布设较多的台站,需要在勘探区域均匀布设7个以上检波器,且检波器之间的距离应尽量不等[14]。F-K法是根据最大似然法理论从天然源记录中求取瑞雷波的频率-波数功率谱,并用不同中心频率的窄带滤波器提取各个频率成分的面波相速度。该方法是将微动信号从时间-空间域转换到频率-波数域进行分析,利用波数矢量的方向性,从F-K谱图中推算出入射波的方向和瑞雷波相速度的大小。
波数矢量的函数表达式为
(7)
式中,k为波数矢量,rad/m;f为频率,rad/s;v为相速度,m/s。
通过频率-波数功率谱的方位角确定某个频率成分面波的传播方向为
(8)
求出不同频率f对应的相速度,即可获得一条相速度频散曲线。
2 微动探测对比试验
2.1 台阵对比试验
试验位置在陕西省眉县县城范围内。试验采用DTCC公司的SmartSolo IGU-16HR无线节点采集仪器。该仪器设备具有高质量、高灵敏度、高可靠性、低失真等特点,满足此次微动勘探的需求。台阵试验分别采用直线型、L型、十字型、口字型、三重圆型方式布设,采样间隔1 ms,记录长度3 600 s。
对不同观测台阵的微动信号进行频散谱提取,如图1所示。由图1可知,直线型排列在北东及北西方向频散曲线差别较大,并且频散谱能量相对分散,是由于其只能接收到来自一个方向的微动信号,因此并不能完全反应地下的真实情况,如果确定微动信号来源方向,可以垂直振动信号方向布设直线型排列。L型台阵的频散谱能量相对分散,十字型、口字型以及三重圆型台阵频散谱能量集中度都高。其中以三重圆型台阵频散谱能量集中度最高,且其在低频段的频散谱能量相对于十字型和口字型更为集中。

图1 不同台阵频散谱Fig.1 Dispersion spectrum of different arrays
对比结果表明,在地形条件允许的情况下,采用三重圆型台阵布设效果最好。
2.2 多重圆测深对比试验
为了测试多重圆台阵的探测深度,分别使用不同半径的三重圆与四重圆的布设方式,来试验其探测深度。三重圆半径分别为5 m、10 m及20 m,四重圆半径分别为25 m、50 m、100 m、200 m。采样间隔1 ms,记录长度3 600 s。采集数据如图2所示。

图2 不同台阵微动数据Fig.2 Micro-motion data of different arrays
根据频散谱提取出频散曲线,然后进行反演,反演结果如图3所示。

图3 不同台阵微动反演结果Fig.3 Micro-motion inversion results of different arrays
根据反演结果看到,三重圆型布设最大半径为20 m,其反演结果深度在85 m左右,其探测深度为其最大半径的4.25倍。四重圆型布设最大半径为200 m,其反演结果深度在570 m左右,其探测深度为其最大半径的2.85倍。经过试验及参阅相关文献数据,证实多重圆探测深度一般为其最大半径的3~5倍。
3 微动探测方法在隧道探查中的应用
在一火车隧道上方进行微动探测工作。根据已知资料,该隧道呈南北走向,微动探测测线设计与隧道走向垂直,为东西方向布设,如图4所示。
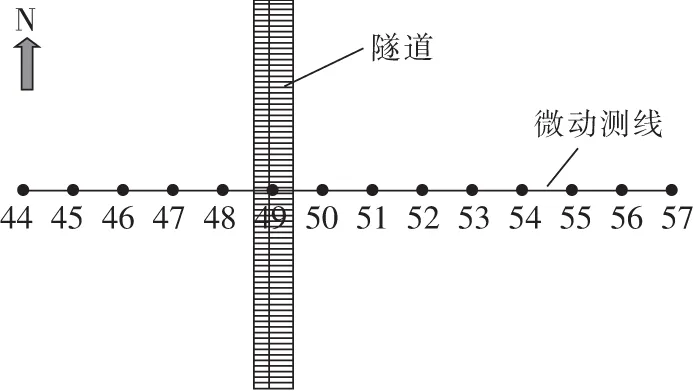
图4 微动测线布设与隧道走向示意Fig.4 Micro-motion survey line layout and tunnel orientation
微动数据采集仪器继续使用DTCC公司的SmartSolo IGU-16HR无线节点采集仪器。微动勘探观测系统采用多个连续的三重圆型排列进行观测,数据采集三重圆半径分别为4 m、8 m、16 m。采样间隔1 ms,连续记录3 600 s。采集期间对周围进行警戒,保证采集期间无人为干扰,微动数据采集记录如图5所示。在对微动数据进行处理时,首先使用ESPAC法提取频散曲线,将提取到的频散曲线进行反演,得到单点的速度-深度模型,然后将速度-深度模型组成一条测线,生成视S波速度剖面,如图6所示。

图5 三重圆二维排列微动数据Fig.5 Triple circle two-dimensional arrangement of micro-motion data

图6 微动探测S波速度剖面Fig.6 S-wave velocity profile of microtremor survey
根据处理得到的S波速度剖面可以看到,在勘探区域中部,地面桩号49位置,深度距地面23 m处,有一明显低速异常区域,由于隧道的存在,在S波速度剖面上也应表现为低速异常,根据这一特征将该低速异常区域解释为隧道位置。经过与实际隧道位置相比对,其在横向及纵向上均与隧道位置相吻合。
4 结论
通过对不同观测台阵的探测效果进行对比分析,在场地允许的情况下,使用三重圆台阵布设方式效果最好。通过多重圆台阵测深试验,确定多重圆探测深度为其最大台阵半径的3~5倍。通过微动探测方法在隧道探测中的应用效果,验证了该方法的有效性与稳定性。
猜你喜欢
河南化工(2022年3期)2023-01-04
电子测试(2022年16期)2022-10-17
汽车实用技术(2022年11期)2022-06-20
北京航空航天大学学报(2020年10期)2020-11-14
振动工程学报(2020年4期)2020-08-13
科技资讯(2019年24期)2019-11-11
雷达学报(2018年5期)2018-12-05
雷达学报(2018年5期)2018-12-05
宇航计测技术(2018年3期)2018-09-08
作文与考试·小学高年级版(2017年16期)2017-08-14
