
非匹配扰动下变体无人机预设性能控制
2022-03-29 07:49李新凯张宏立范文慧
航空学报 2022年2期
李新凯,张宏立,*,范文慧
1.新疆大学 电气工程学院,乌鲁木齐 830047
2.清华大学 自动化系,北京100084
半倾转旋翼变体无人机结合了传统多旋翼无人机和固定翼无人机的优势,具有可垂直起降、悬停、长航时、高速巡航等优异特性,成为执行监测任务的新机种。根据不同任务需求,变体无人机可自由切换飞行模式,在复杂环境和任务中能表现出良好的稳定性,灵活性和鲁棒性。目前已创造出多种变体无人机,包括但不限于经典倾转旋翼机,仿生扑翼机,矢量推进旋翼机,尾座式无人机等多种复合构型。由于变体无人机的飞行模式涉及机械结构切换、数学模型复杂度提升等问题,给设计更加鲁棒、通用且高效的控制器提出了更高的挑战。
半倾转旋翼变体无人机欠驱动、强耦合等固有特性使其对外部扰动尤其是非匹配扰动更加敏感,增加了控制难度。匹配扰动是指扰动与控制输入在同一通道中,而非匹配扰动是指异于控制输入通道进入系统的扰动。非匹配扰动广泛存在于实际工程系统中,如火箭系统和直升机系统等。为了处理系统扰动,研究者提出了多种控制方法,包括自适应控制、滑模控制等。然而这些方法只有当外部扰动满足匹配条件时才能保证不变性,不能对非匹配扰动进行有效抑制。这是由于非匹配扰动无法利用反馈控制器直接消除,已有的传统抑制匹配扰动的控制方法无法有效地处理非匹配扰动对系统性能的影响。为此,文献[13]针对具有执行器故障、非匹配扰动和时变时滞的连续李普希茨非线性控制问题,提出了一种自适应积分滑模容错控制技术,其中包含了两个自适应律和补偿器来补偿观测器的误差以减小执行器故障的影响。文献[14]针对非匹配扰动,分别设计了无记忆的积分滑模面和基于记忆的积分滑模控制器,在板球系统中进行了验证。文献[8,15]同样采用扰动观测器的滑模控制方法来抵消非匹配扰动。然而,文献[13-15]提出的扰动观测器针对的非匹配扰动类型较为单一,难以适用于工作环境复杂的强耦合非线性系统。文献[8]利用多变量有限时间观测器对非匹配和匹配扰动进行估计,但未能将非匹配扰动准确分离,仅当作外部综合扰动进行处理。
浸入与不变(Immersion and Invariance,I&I)理论作为一种可对系统不确定性进行估计的非线性观测器,其最大特点是允许估计值不依赖控制律而收敛到其真实值,自提出后得到了广泛关注。近年来,学者提出动态尺度技术,并与I&I理论相结合用于估计系统中的非线性项,取得了较明显的效果。文献[21]针对重力场和旋转速度未知的小行星,基于I&I理论并结合动态尺度技术设计了一种自适应律,与反步控制器结合来估计未知参数。文献[22-23]采用I&I理论与动态尺度因子结合,针对无速度航天器设计了基于姿态四元数的角速度耦合观测器。不可否认,结合动态尺度技术和I&I理论的观测器对系统不确定性具有较高的估计精度。然而,动态尺度因子的自适应收敛具有被动属性,不能使观测器达到满意的收敛速度,需要对其进行主动的监督和调节。
此外,复杂任务执行期间要求变体无人机的轨迹及姿态跟踪系统具有优异的瞬态性能且能满足性能约束。由于预设性能控制可同时表现出系统的稳态和瞬态性能的优异特性,自提出以来受到广泛研究。文献[26-27]将性能函数与自适应反步控制方法结合,分别对航天器、高速列车存在的执行器故障和系统不确定性问题进行了研究。文献[28-29]将性能函数与滑模控制方法相结合,分别对空间机器人、四旋翼无人机系统存在的不确定性问题进行了研究。然而,文献[26-29]都采用了原始文献[24]中预设性能函数的基本形式(()=(-)e+),是对预设性能控制的基本推广。文献[30]首次引入具有有限时间收敛特性的预设性能函数(Finite-time Performance Function,FTPF),可在预设时间内达到跟踪误差的规定性能,随后文献[31-32]对其做了部分成果推广。另外,障碍Lyapunov函数(Barrier Lyapunov Function,BLF)具有天然的约束属性,同样在解决系统状态约束问题方面得到了发展。由于预设性能函数与BLF 在解决系统约束方面具有共通之处,有学者开始探索两者结合的可能性。文献[37-38]将性能约束嵌入到BLF的传统对数形式中,然后与基础的性能函数设计形式结合设计出相应的控制器。文献[39]采用基础的性能函数对系统滑模面进行约束,并将其以对数形式引入到控制器中。以上尝试仅仅采用了两种基本方法的简单结合,没有充分考虑BLF在不同扰动环境下所表现出的不同性能。如果能将FTPF 的形式进一步与BLF 思想有机融合,有望获得更好的性能表现。
本文以变体无人机为研究对象,针对非匹配扰动和飞行模式切换易造成瞬态失稳的问题,构造基于复合I&I的非匹配/匹配扰动观测器和融合BLF的新型有限时间预设性能控制器。主要贡献如下:
1)提出复合I&I结合动态尺度因子的非匹配/匹配扰动观测器,并提出监督因子对动态尺度因子进行有效调节,以提高非匹配/匹配扰动估计的收敛速度。
2)首次提出基于上下界的二分型FTPF 构型。对上下界性能约束函数分别进行有限时间理念的单独设计,可优化跟踪误差的瞬态性能,同时提高稳态误差的收敛精度。
3)将FTPF的约束和动态滑模面作为BLF的边界条件,首次构造了新形式的BLF,使跟踪误差能够在有限时间内获得高品质的收敛性能。
1 变体无人机模型及预备知识
1.1 变体无人机物理模型
本文所研究的变体无人机旨在满足长途、长航时等基本任务需求的同时,力求结构紧凑、机械结构简单、操作可靠。一种四旋翼-固定翼复合模式的半(前)倾旋翼变体无人机,其三维结构形态如图1 所示。前两个电机安装在机翼的前中边缘,机翼依靠内部舵机齿轮动力在垂直-水平位置范围内倾转。机翼倾转到垂直位置,变为垂直起降模式时只使用电机旋翼推力垂直起飞、降落和悬停;当需要高速长航时的水平飞行模式时,机翼逐渐倾斜到所需速度的适当角度以获取机翼升力,与后两个旋翼共同作业克服重力和阻力,并相应地调整电机推力。飞机总翼展为1.2 m,单机翼面积为0.08 m,四旋翼模式轴距792 mm,重量为3 kg。通过将大比重零部件(例如电池)后移,调整重心至垂直起降模式下各旋翼的中心点上,使其前后左右质量对称分布。与传统四倾旋翼无人机相比,其执行器结构简单,总质量低,控制稳定。变体无人机的飞行模式切换过程如图2所示,包含3种模式:垂直起降飞行模式,过渡飞行模式和水平飞行模式。

图1 变体无人机CAD 结构设计Fig.1 CAD structural design of morphing aerospace vehicle

图2 飞行模式切换示意图Fig.2 Schematic diagram of flight mode switch
综合考虑其飞行特性,翼型采用Clark-Y 型,通过Solidworks/Flow Simulation进行流体动力学仿真,对翼型提供升阻力的能力能否满足飞行需求进行验证。由图3和图4所示的流体仿真结果可知,风速为15 m/s,攻角为8.5°时,可获得15.57 N的升力;风速为20 m/s,攻角为5°时,可获得18.55 N的升力;机翼与后两旋翼共同出力能够满足飞行需求,两组仿真计算均能说明翼型选择的合理性。

图3 翼型流体仿真Fig.3 Airfoil fluid simulation
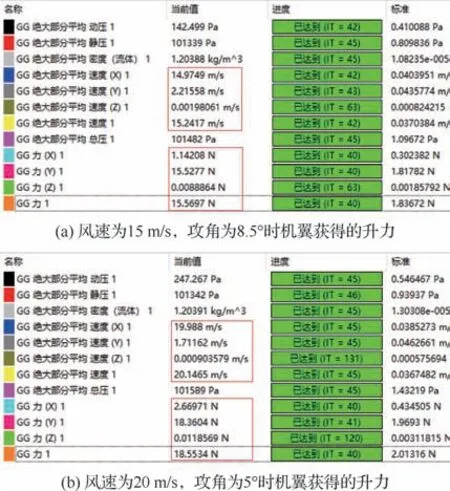
图4 翼型流体动力学仿真结果Fig.4 Simulation results of airfoil fluid dynamics
1.2 变体无人机数学模型


图5 变体无人机的坐标系框架与机体受力示意图Fig.5 Schematic diagram of body force and coordinates of morphing aerospace vehicle
忽略机翼力,设置=π/2,垂直起降模式的动力学方程为
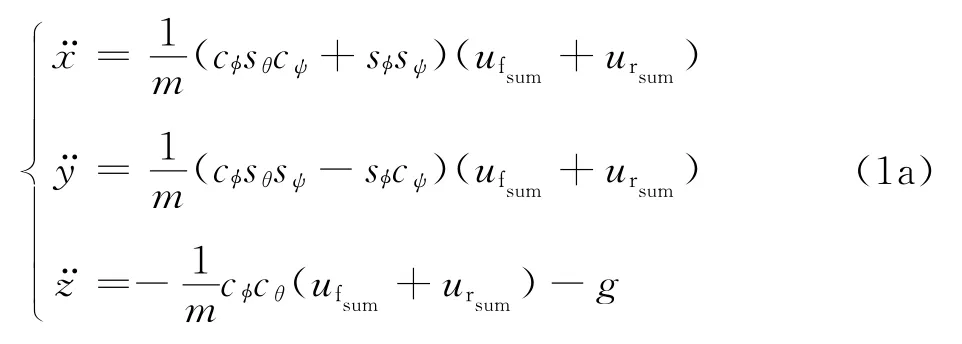

过渡和水平飞行状态的动力学方程可写为


从动力学模型(1)和(2)可知,垂直起降飞行模式可看作是当=π/2时在过渡和水平飞行模式下数学模型的一种特殊形式。在水平飞行模式下,由机翼产生的升阻力及其转矩可表达为
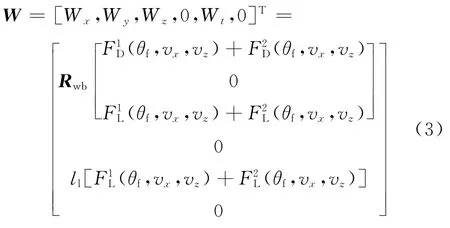
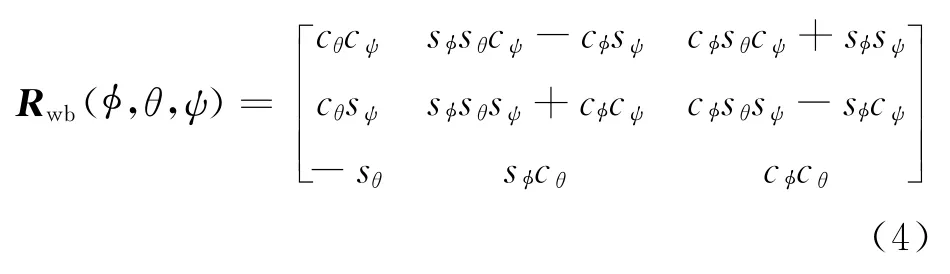
式中:表示机体坐标系到世界坐标系的转换矩阵,具体表达式为



机翼与机体夹角作为变体无人机的关键变量决定了过渡和水平飞行模式的飞行品质。飞行模式切换过程中,在初进入过渡飞行模式时,匹配扰动会对机体产生较大的扰动影响,根据的变化,将变形过程中对机体造成的综合影响作为扰动来处理,可以达到更好的飞行品质。
带有非匹配/匹配扰动的变体无人机的动态模型可表示为如下的紧凑形式:

式中:,=1,2,3,4,5,6表示每个子系统通道(,,,,,);表示每个子系统通道的一阶微分;,分别为系统的非匹配扰动和匹配扰动,[,,,,,]=[,,,,,],[,,,,,]=[1/,1/,1/,1/I,1/I,1/I],

外部非匹配/匹配扰动,是连续可微的,且对其Lipschitz常数Δ有sup{||,||}≤Δ,其中Δ为外部扰动的上界。
本文采用内外环控制,将位置控制设置为外环,姿态控制为内环,控制结构框图如图6所示。
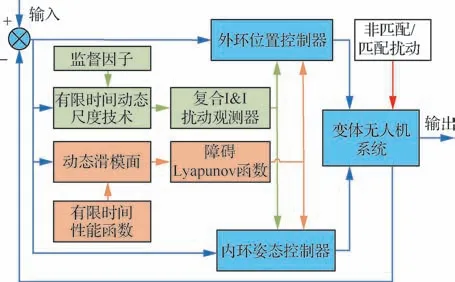
图6 本文方法的控制原理框图Fig.6 Schematic diagram of the proposed control strategy
将位置外环转化为虚拟控制输入,通过预设轨迹可解算出对应的理想输入姿态角。转换的等效虚拟控制输入如下:

解算出总推力输入和对应的姿态角分别为

1.3 引理与命题
考虑如下二阶非线性系统

式中::→R 在原点的开邻域内连续。假设系统(11)对所有初始条件都有唯一解。为的初始值。




2 基于复合I&I的扰动观测器
本节构建复合形式的I&I扰动观测器,对非匹配扰动和匹配扰动同时进行估计。
传统基于I&I理论的观测器仅仅是由跟踪误差的信息驱动的。然而,参数估计误差,即预测误差,也包含了参数自适应的有用信息。当2种信息源结合使用时,往往能获得较好的参数估计结果。在本节中,首先构造了由跟踪误差和预测误差共同驱动的复合I&I扰动观测器,首次与动态尺度因子进行结合,并利用监督因子对动态尺度因子进行调节,提高观测器的观测性能。
考虑式(6)中存在非匹配和匹配扰动的系统,定义非匹配扰动和匹配扰动的估计误差分别为




如果以下误差流形集具有吸引与不变性,


将式(16),式(17)分别代入(14),式(15),得到

选择补偿函数为

式中:a>0。将式(20)代入到式(19)中,可得

选择与式(21)中第1项相似的跟踪估计误差形式,预测误差的估计律可以选择为


引入动态尺度技术来提高对非匹配/匹配扰动的估计精度,动态估计误差可被重新设计为
对动态估计误差z 求导,并将式(21)~式(22)代入,可得


监督因子α具有主动性,动态尺度因子r是被动的,当α被设置时r 自适应地收敛到某定值。两者共同作用保证I&I扰动观测器能够准确地对非匹配/匹配扰动进行估计。
为保证尺度估计误差z 的收敛以及r ()∈,定义轨迹跟踪状态和误差动态的估计表达式分别为

式中:k >0。
构建有限时间动态尺度因子r ()的形式为



估计误差z 是渐近稳定的。




3 有限时间预设性能函数与控制器设计
预设性能控制方法能够通过定量约束来刻画变体无人机的稳态和瞬态性能,且不限制具体的控制器设计方法,这些特性都使得预设性能控制方法可以实现高品质的控制性能。传统预设性能约束关系(如文献[26-29]等)依赖于跟踪误差初始值的正负性,且上下界的关系只是同一个性能函数简单的线性尺度缩放关系。其原理上只能使系统跟踪误差单侧的上界/下界受到合适的约束,而另一侧不能自适应“贴合”下界/上界约束,影响初始阶段即有限时间内的瞬态性能。
在本文中,分别定义不同的FTPF 来组成上下性能边界,具有指数级的有限时间收敛属性,而无需判定初始跟踪误差的正负。

由定义1,一种新的上界FTPF可设计为


式中:>0,()<0,()是状态误差e()的下界约束。和可以调节在有限时间内的收敛速率,使(),()成为2个指数级收敛可控的性能函数。


此处与第2节中的e不同。表示系统与期望状态之间的真实误差,而第2节中e表示系统状态与估计值之间的估计误差,用于设计有限时间扰动观测器,对非匹配和匹配的扰动进行估计和补偿。
选择如下形式的动态滑模面:

将式(33)代入到式(34)中,并求导,可得
基于滑模理论,设计一种带有超螺旋项的二阶滑模控制器为

式中:>0,()>0,()为状态误差e()的上界约束。

由定义2,下界FTPF可设计为
传统性能函数只对系统误差进行性能约束,忽略了系统状态一阶导数的瞬态表现,难以实现对系统全状态的性能约束。而滑模面的设计形式决定了其本质是对系统跟踪误差及其速度误差的伪线性综合。本文将滑模面作为系统的性能指标,能充分展现控制状态的稳态和瞬态性能。
带有性能函数约束的动态滑模面满足如下约束形式:

式中:0<|s(0)|<min{■ρ(0),ħσ(0)},0≤■,ħ≤1,选取ρ(0)=11×s(0)。
本文取消传统性能函数的误差转换函数,首次将FTPF 与BLF 相结合,并首次将上下界有限时间性能函数的差值作为BLF 的边界条件,使跟踪误差获得高品质的收敛性能。
考虑带有外部非匹配/匹配扰动的系统(6),且满足假设1 和性能函数约束条件(39),则有以下结论成立:1)动态滑模面s有界且渐近稳定;2)系统(6)状态变量有限时间一致稳定。
1)首次提出与上下界FTPF 相匹配的BLF形式:


当∈[0,)时,对式(40)求时间导数,有
考虑Lyapunov函数W =L +V ,求导并代入式(35)和式(36),可得

式中:为正定矩阵:







式中:1<<2,即2/3<(+1)/<2。根据引理1和命题1,系统(6)的状态变量是有限时间一致稳定的。证毕。
4 仿真结果与分析
变体无人机的机体参数为:=3.0 kg,==0.28 m,=1.293 kg/m,=0.08 m,I =I =1.75 N·s/rad,I =3.5 N·s/rad。
为说明本文所提方法有效性,本节采用2种对比方法。第1种为传统的I&I方法设计扰动观测器并结合滑模控制(SMC)方法(标记为I&ISMC),对比测试本文方法对外部扰动,尤其是非匹配扰动的估计性能。
第2种对比方法是为了验证本文所提出的预设性能方案的有效性。由于本文采用新形式的FTPF和BLF,为了提高瞬态性能,将滑模面作为被约束指标,暂时找不到相对应的文献方法。因此,第2种对比方案采用与本文方法相同控制器形式,相同参数,但不采用预设性能函数(标记为Without PPF)的约束来进行对比。
为了综合测试变体无人机飞行模式的性能,选择一组多任务复合的参考轨迹,包含“起飞—平滑加速—过渡切换—平飞—圆形盘旋—平飞”等几项任务:

式中:= (20exp(4))/(exp(4)+1),=50ln(exp(4)+1)-0.907 5,机体的初始位置设为(1,1,0)m。系统受到的非匹配扰动和匹配扰动分别设为

式中:sigmoid=1/(1+exp(-))。非匹配/匹配扰动观测器初始值全部设置为0。
本文方法的控制增益如表1所示。根据文献[43],将机翼升阻力系数C,C随攻角的变化曲线部分合理线性化,得C=0.1+0.3,C=0.002+0.004。取值范围为[0°,90°]。本文所研究的变体无人机的机翼与机身夹角在垂直起飞模式下保持为90°,8 s时开始进入过渡飞行模式,设计切换曲线为

表1 本文方法控制增益Table 1 Control gains of the proposed method

在切换为平飞模式过程中根据机体的飞行速度动态地调整。另外,设置有限时间动态尺度因子r()中的=3,FTPF的有限时间=2。
图7和图8展示了3种方法对参考轨迹的跟踪性能对比。可以观察到,I&I-SMC 方法和Without PPF方法往往在初始阶段振幅较大,收敛速度较慢。而且,在圆形盘旋阶段,Without PPF方法在轴方向产生了较大的轨迹跟踪偏离。箱线图统计了10%~90%的跟踪误差数据。从箱线图分析可知,本文方法在最大、最小值,中位数和误差精度方面均具有明显的性能优势。

图7 3种方法的轨迹跟踪效果Fig.7 Trajectory tracking effect of the three methods

图8 3种方法的位置跟踪误差及箱线图分析Fig.8 Position tracking errors and boxplot analysis of the three methods
图9展示了3种方法的期望姿态角及其跟踪误差的响应。该方法求解的期望姿态角比较平滑,表明该方法具有较强的抗干扰能力。Without PPF方法由于缺少性能约束,在横滚角跟踪时的圆形盘旋阶段,进圆和出圆时产生了瞬间的误差振荡;在俯仰角跟踪初始阶段也有较大的抖振,但稳定后有不错的跟踪误差效果。I&I-SMC方法在姿态跟踪过程中误差较大且持续抖振。综合分析可知,本文方法跟踪误差较小,既不会在符合任务轨迹切换时产生振荡,也不会在初始阶段产生瞬时超调,证实了本文方法在轨迹及姿态跟踪效果和稳定性方面具有明显优势。
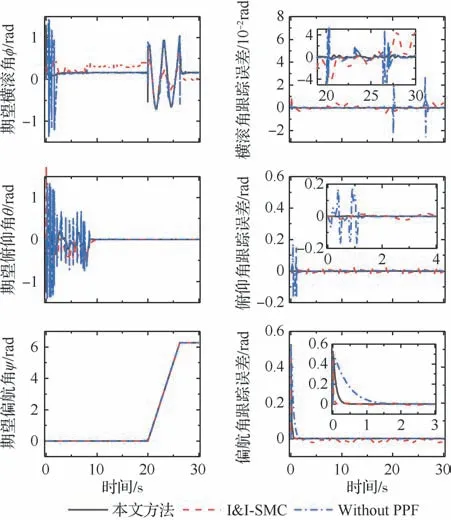
图9 解算出的期望姿态角及其跟踪误差Fig.9 Solved attitude angles and their tracking errors
姿态系统的期望输入角是由位置系统的虚拟控制律推导出来的。由于控制策略的不同以及扰动的影响,所求出的期望姿态角也不同。因此,必须使用仿真曲线来分别显示3种方法的期望姿态角。
图10和图11分别展示了非匹配扰动和匹配扰动观测器的估计性能。为了更清晰展现扰动估计误差的细节,在小窗口中展示结果曲线的整体轮廓。与传统I&I观测器对比分析,本文方法在误差估计方面具有更高的精度,更快的收敛速度和更小的瞬时振荡。基于复合I&I,并引入有限时间动态尺度因子和监督因子的非匹配/匹配扰动观测器具有更优异的估计效果。另外,从图11的匹配扰动观测结果可以看出,在垂直起降模式下误差估计精度较高;进入过渡切换模式后,模式切换对机体造成了较大的综合扰动,因此匹配扰动估计误差产生了明显的抖振;切换到水平飞行模式后,扰动估计误差趋于平稳。在20 s“画”圆时,机翼与机体夹角不断自适应调整,同样造成了扰动估计误差的抖振。

图10 非匹配扰动观测器的估计性能对比Fig.10 Comparison of estimated performance of mismatched disturbance observer

图11 匹配扰动观测器的估计性能对比Fig.11 Comparison of estimated performance of matched disturbance observer
为了展示本文所提出的预设性能函数FTPF的约束效果,选取滑模面及其上界FTPF1 和下界FTPF,=0.1,=-0.1,如图12所示。本文方法的滑模面在2 s内贴合上下2个FTPF,在20 s-(20+2π)s内轨迹切换时同样始终被1 和限制在约束之内。然而,由于缺乏性能约束,I&I-SMC方法和Without PPF方法在性能收敛阶段和20 s-(20+2π)s内均出现了不同程度的振荡和性能约束溢出。在有限时间内,本文方法没有大的瞬时振荡,因而拥有更好的瞬态性能,证实了所提预设性能控制方案的有效性。
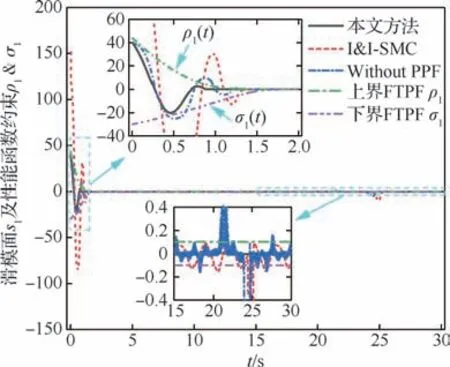
图12 滑模面s1 及其性能函数的约束响应Fig.12 Constraint response of sliding surface s1 and its performance function
由图13展示的3种方法的控制输入信号,可以分析模式切换过程对控制造成的影响。由本文方法的控制信号曲线可知,垂直起降模式下控制信号较为平稳;进入过渡飞行模式,关键变形量的变化对机体产生了明显的综合扰动,相应信号产生了较为明显的变化,切换至水平飞行模式后趋于平稳;在20 s后由于“画”圆在轴方向突然施加较大的力,控制输入信号产生了较大的变化,其动态响应变化与其他曲线结果的分析一一对应。由于控制策略的不同以及复杂扰动的影响,I&I-SMC和Without PPF 方法为了能使飞行器快速达到稳定,控制输入信号出现较大的抖振。本文提出的非匹配/匹配扰动观测器对复杂扰动优异的估计效果大大降低了扰动对控制输入信号的影响,控制输入较为平滑,稳定性好。
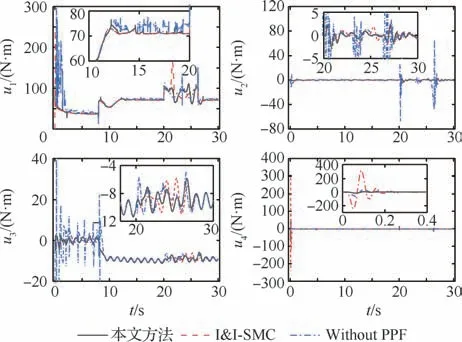
图13 3种方法控制信号的输入历史响应Fig.13 Control signal history responses of the three methods
本文所研究的变体无人机的机翼与机身夹角及其飞行速度关于时间的对应关系如图14的双轴曲线所示。机翼在8 s时开始平滑倾转,根据飞行轨迹和飞行速度的不断反馈而实时变化。可以看出,I&I-SMC方法和Without PPF方法在水平飞行阶段的变化出现小幅高频抖振;本文方法速度和的变化较为平稳。结合图13中3种方法的控制输入信号分析,可知本文方法在平飞过程中有较高的稳定性。

图14 机翼与机身夹角θf 及机体合成总速率的对应关系Fig.14 Relationship between the angle of wing and fuselageθf and the total synthesis rate of fuselage
由于数据较多,选取有限时间动态尺度因子在图15中作为展示:本文所提出的有限时间动态尺度因子随着不同有限时间设定值变化的收敛效果。可以看出,有限时间动态尺度因子均能在不同设定值内平滑收敛。验证了本文动态尺度因子基于有限时间收敛性能的有效性。

图15 不同T f 设定值时动态尺度因子r 11的收敛效果Fig.15 Convergence effect of dynamic scaling factor r11 for different values of T f
最后,本文在图16 中展示了不同监督因子设定值时,相应的有限时间动态尺度因子及扰动的尺度估计误差的响应。越大,收敛越平滑,同时扰动估计的尺度估计误差收敛速度越快越精确。

图16 不同监督因子α11设定值时相应的有限时间动态尺度因子及扰动的尺度估计误差z 11的响应(T f=3)Fig.16 Responses of finite-time dynamic scaling factor r 11 and disturbance scaling estimation error z 11 for different supervision factorsα11(T f=3)
上述仿真结果说明本文所提出的非匹配/匹配扰动观测器具有稳定而精准的扰动估计性能,基于FTPF的新型预设性能控制策略是明显有效的且性能表现优异。
5 结 论
1)基于复合I&I并结合有限时间动态尺度因子和监督因子的非匹配/匹配扰动观测器,在处理非匹配扰动方面具有明显优越性,动态尺度因子的有限时间特性在理论和仿真中得到验证。
2)理论和仿真结果表明,基于上下界的二分型FTPF构型摆脱了传统性能函数依赖性能误差初始值正负性的劣势,且在有限时间收敛过程中有更好的瞬态性能。
3)结合FTPF 约束和动态滑模面构造的BLF能使跟踪误差在有限时间内获得高品质的收敛性能。
猜你喜欢
上海师范大学学报·自然科学版(2022年3期)2022-07-11
电脑报(2022年11期)2022-06-14
汽车实用技术(2022年5期)2022-04-02
文萃报·周二版(2022年11期)2022-03-23
智富时代(2018年10期)2018-01-30
智富时代(2018年10期)2018-01-30
同学少年·作文(2017年1期)2017-06-05
中国信息化周报(2015年1期)2015-04-09
河北渔业(2014年11期)2014-11-17
湖南师范大学学报·自然科学版(2014年5期)2014-11-14
