
基于无人机倾斜影像的阔叶林单木参数提取
2022-03-30 10:52陈周娟卜元坤陈佳卉李卫忠
林业资源管理 2022年1期
陈周娟,程 光,卜元坤,黄 维,陈佳卉,李卫忠
(1.西北农林科技大学 林学院,陕西 杨凌 712100;2.陕西省林业科学院,西安 710082)
单木结构参数作为森林资源调查最主要的测树因子,不仅能反映林木个体的生长情况,还能够反映森林生态系统对地上部分资源的利用能力,对森林生物量的估测、森林碳库的估算等方面起着重要作用。因此,高效获取林木参数是掌握林木生长状态及改进森林经营管理工作的重要前提[1]。传统的每木检尺调查方法不仅耗时长、成本高,而且精度往往难以满足现代精准林业的需求。近年来,无人机倾斜摄影测量技术(Unmanned Aerial Vehicles Tilt Photogrammetric Technology)的发展与完善为高效获取林木信息提供了新思路。与传统森林资源调查方式相比,无人机倾斜摄影技术在采集数据方面具有经济、高效、方便、灵活等特点,其数据可以满足人们对三维信息的需求[2-4]。无人机倾斜摄影技术在林木精准测量、森林科学经营方面具有广阔的应用前景,在森林资源调查上正逐步成为不可或缺的高新技术手段。
国内外学者基于无人机倾斜影像数据的单木参数提取策略,通常将无人机影像数据经过运动恢复结构(Structure from Motion,SfM)获取影像匹配点云[5-7],再将影像匹配点云转化为栅格化模型——冠层高度模型(Canopy Height Model,CHM),单木参数提取的过程随即转变成二维影像的检测与分割问题。识别单木的一般过程,包括树顶探测和树冠边界勾绘过程,其中,局部最大值法[8-9]常用于树顶点识别,区域增长算法[10]、分水岭算法[11-12]、模板匹配法[13]等则常见于树冠提取。Mochan等[14]以混交针叶林为实验样地,基于无人机衍生的CHM,利用局部最大值法进行单木识别,准确率高达85%(F得分为0.86);刘江俊等[15]研究证明了基于无人机影像利用局部最大值法可以较好地提取密集针阔混交林的树顶点和树高,树顶点识别的F得分最高可达到0.77,树高提取的均方根误差为1.41m;袁梓健等[16]研究发现,利用CHM最大值法分割华山松时,其精度比点云分割法高,林木株树分割精度分别为87.17%和80.79%;陈崇成等[17]以2个分别种植罗汉松(Podocarpusmacrophyllus(Thunb.)D.Don)和桂花树(Osmanthusfragrans(Thunb.)Lour.)的苗圃为样地,运用种子区域增长算法分割单木树冠,结果显示,两个样地中树冠估测的F得分均达到了0.89以上,冠幅误差在0.14m以内;杜意鸿等[18]研究表明分水岭算法和均值漂移分割算法在提取单木油松冠幅上具有较大的潜力,冠幅估测的F得分均达到了0.8以上。以上研究表明,当前基于无人机倾斜影像的林木参数提取技术主要是面向针叶林,少数基于无人机影像的阔叶树相关研究也主要聚焦于树种识别等方面。相较于针叶树树冠的锥形特征,阔叶树常存在单个阔叶冠内有多个局部峰值,树冠轮廓更为复杂的问题,如何从无人机影像数据中准确提取阔叶树的顶点及树冠轮廓是目前无人机影像数据提取技术需要攻克的重点和难点。
基于此,本研究以阔叶树种银杏(GinkgobilobaL.)为研究对象,基于影像匹配点云,采用局部最大值算法、种子区域增长算法和标记控制分水岭算法,对研究区内单木进行定位识别及树冠轮廓分割,旨在探索基于无人机倾斜影像快速精确地提取阔叶树种单木参数的可行性与精度,为无人机倾斜摄影技术在森林资源调查中的推广以及基于无人机影像的阔叶树种单木参数快速提取提供理论和方法支撑。
1 研究区概况及数据来源
1.1 研究区概况
研究区位于陕西省咸阳市杨凌农业高新技术产业示范区(34°14′~34°20′N,107°59~108°08′E),海拔在418.0~540.1m之间,属东亚暖温带半湿润半干旱气候区,具有春暖多风,夏热多雨、秋热凉爽多连阴雨、冬寒干燥等明显的大陆性季风气候特征。年均气温12.9℃,无霜期211d。年均日照时数2 163.8h,年总太阳辐射量为114.86kcal/cm2,年均降水量635.1mm。
研究区内主要的乔木树种为银杏。银杏是银杏科、银杏属落叶乔木,为阳性树种,深根性,对气候环境及土壤条件的适应范围广,旺盛生长于冬春温寒干燥或者温凉湿润、夏秋温暖多雨,土壤肥沃、排水良好的地区。银杏适应能力强,是主要的造林树种、防护树种、抗病虫树种及耐污染树种,在改善生态环境、固土保水、防治虫害和保护生物多样性等方面具有重要意义。

图1 研究区位置示意图
1.2 数据来源
1.2.1无人机数据采集
无人机数据采集于2020年9月11日中午进行,天气晴朗,风力小,适合无人机航拍作业。飞行利用大疆四旋翼无人机经纬M300 RTK,搭载赛尔五目镜头PSDK 102S,为获取地面分辨率达到1cm的无人机倾斜影像数据,设置无人机飞行高度为64m,飞行速度为7.9m/s,旁向重叠度75%,航向重叠度80%,外扩边距64m(表1),获取5组研究区影像照片,共2 510张相片。
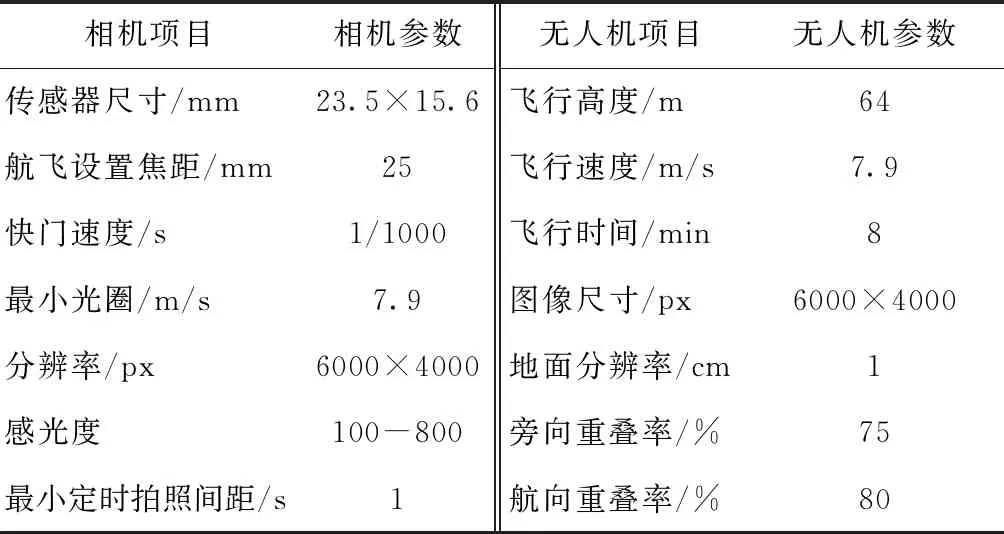
表1 PSDK 102S相机参数及M300RTK无人机飞行参数
1.2.2地面实测数据采集
地面实测数据采集于2020年9月25日开始。在研究区银杏林分内,选取地形平坦(坡度<5°)且株数密度大于200株/hm2的典型样地1块,如图1所示。样地为梯形,样地面积为8 160m2,样地内共有银杏林木184株。使用载波相位差分技术(Real-Time Kinematic,RTK)记录每株林木的GPS坐标与样地四角点坐标,以便在ArcGIS中准确定位,定位精度在3~5cm之间。利用传统方法对胸径大于5cm的银杏进行每木调查,调查包含胸径、树高、东西和南北方向的冠幅长度等因子(表2)。由于实地采集树冠面积“真值”具有一定的难度,且精度难以保证,因此,本研究将采用研究区的数字正射影像(Digital Orthophoto Map,DOM)运用eCongnition软件进行多尺度分割,再由ArcGIS软件对分割结果进行手动修改和描绘,得到的冠幅面积作为实冠幅面积“真值”。

表2 实测单木参数统计
2 研究方法
2.1 数据处理与分析
2.1.1无人机影像预处理
为提取研究区三维结构信息,需先对无人机影像进行运动恢复结构(SfM)三维重建。SfM算法首先根据摄影相机参数及无人机拍摄时记录的位姿数据(POS数据文件)对初始无人机影像数据进行特征点匹配,在稀疏重建处理之后得到稀疏结构点云,经空中三角测量加密进行多视角影像密集匹配得到稠密点云。点云数据经插值生成数字表面模型(Digital Surface Model,DSM),经地面点分类、归一化等处理,生成数字高程模型(Digital Elevation Model,DEM),DSM和DEM之差,得到CHM;同时,由实景三维模型可获取数字正射影像(Digital Orthophoto Map,DOM)(图2)。本文采用Benltly公司的Context Capture软件和R语言中的LidR包处理无人机影像数据。

图2 无人机影像预处理流程图
2.1.2单木识别和分割
1)基于局部最大值法的单木识别
CHM是表达树冠上表面距离地面高度和树冠水平分布的模型,树冠边缘与树冠顶部有较大区别,一般而言,树冠顶部亮度值较高。本研究使用基于CHM探测单木顶点位置的方法是局部最大值法(Local-maximum Based Algorithm)。局部最大值法可以通过设置一个移动窗口探测CHM的局部最大值为树冠中心点位置。获取准确局部最大值的关键在于设置一个准确合理的移动窗口范围[19]。结合研究区的林分结构与地面实测数据,本文设置3种移动窗口大小(3m×3m,5m×5m,7m×7m)进行单木顶点探测。
2)基于种子区域增长算法的树冠提取
种子区域生长算法(Seeded Region Growing Algorithm)的基本思想是将有相似性质的像素点合并到一起,对每一个区域要先指定一个种子点作为生长的起点,然后将种子点周围领域的像素点和种子点进行对比,将具有相似性质的点合并起来继续向外生长,直到没有满足条件的像素被包括进来为止。本研究应用的种子区域增长算法,在LidR软件包的dalponte2016函数[20]中实现,用探测的单木顶点位置作为区域生长法的起始点,并根据单木实际生长特征,设定算法的判断阈值,相关参数设置为th_seed=0.2,th_cr=0.75,其余参数值均为默认。
3)基于标记控制分水岭算法的树冠提取
标记分水岭分割算法(Marked-controlled Watershed Algorithm)是根据分水岭的结构来进行图像的分割,是一种模拟浸水过程的数学形态学分割方法。将CHM翻转之后,假设模型局部中存在极小值点,在极小值点处开始浸水,随着水的上升,图形逐渐被浸没,最终形成积水盆。过程结束后,若积水盆中的极小值点为单木顶点,则相邻积水盆之间合并形成的分水岭即为树冠边界。本研究使用的标记控制分水岭算法与种子区域算法相似,为避免传统分水岭分割造成的过分割现象,本研究首先在判断单木顶点位置后,再根据林木实测因子参考值调试分水岭算法中的参数阈值。标记控制分水岭算法使用LidR软件包中的segment_trees函数,相关参数阈值设置为th_tree=6,其余参数值均为默认。
2.2 精度验证
2.2.1树顶点识别验证
树冠顶点与单木根部平面位置通常存在偏差,因此,根据Hirschmugl等[21]提出的检测方法,在实测单木根部位置建立1m缓冲区,由预测顶点与缓冲区的相对位置判断预测顶点位置的准确性。3种常见单木树顶检测结果如图3所示,在缓冲区内若只有唯一提取值则作为正检林木(图3(a)-(b)),若有多株提取木则取距真实位置最近值作为正检值,缓冲区外且树冠范围内的作为误检林木(图3(c)),若树冠范围内没有被检测到林木顶点则记为漏检林木(图3(d))。
统计3种不同窗口下进行局部最大值法的单木探测结果,并进行精度分析与评价。本研究采用以下3个指标进行单木识别衡量[22]:
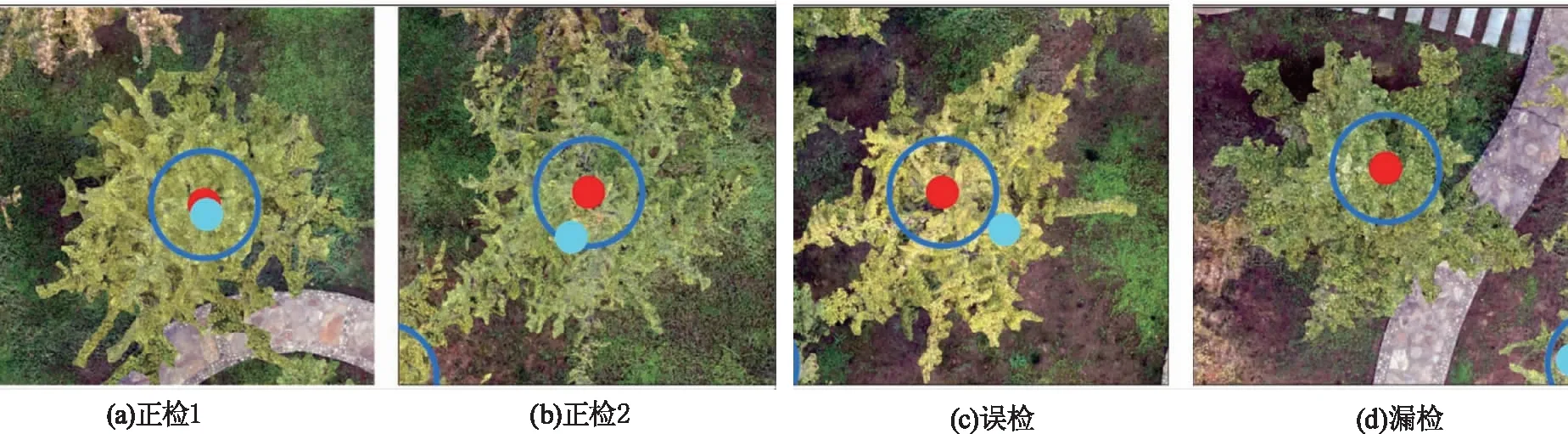
注:红点表示实测单木根部位置,蓝点表示预测单木顶点位置,圆表示以实测单木根部位置为中心建立的1m缓冲区。
(1)
(2)
(3)
式中:r为探测率,指正确预测树顶点的数量和研究区内所有树顶点数量的比率,衡量预测系统的查全率;p为探测准确率,指正确预测树顶点的数量与检测出的所有树顶点之间的比率,衡量模型的查准率;一般情况下r和p指标往往是相互制约的,F得分则为r与p的加权调和平均值,当F得分越高时,则说明单木识别的方法比较有效;TP,FN,FP分别代表正检、漏检和误检的数量。
对预测树高与实测树高、预测冠幅与实测冠幅的拟合效果采用决定系数(R2)、均方根误差(RMSE)2个指标进行评价。其中,决定系数(R2)表示模型的拟合程度,均方根误差(RMSE)表示模型的回归效果。如下:
(4)
(5)

2.2.2树冠分割验证
判断树冠分割的准确性,一方面需要考虑预测冠幅与实测冠幅之间的相对误差,另一方面则需要判断树顶点是否与分割冠幅有较好的匹配。根据杨全月等[23]提出的方法,可使用单木顶点位置与冠幅面积综合判定策略:树木属于正检且冠幅面积小于判断阈值时判定为正确率,则正确率的定义为:
(6)
式中:δ为预测冠幅与实测冠幅的相对误差,δt为判定阈值,Nr为实测树冠数量。预测冠幅与实测冠幅的相对误差计算如下:
(7)
式中:S为算法提取的树冠面积;Sr为对应位置参考树冠面积。
3 结果与分析
3.1 单木识别结果
利用局部最大值法进行树顶点探测时,不同窗口大小的识别结果都存在一定的漏检、误检现象(表3)。研究中发现,采用5m×5m窗口大小进行识别效果最好,准确率达到了80.11%,F得分为0.88;采用3m×3m窗口时,出现较多误检现象,而采用7m×7m窗口时出现较多漏检现象(图4)。
树高预测由树顶点所在位置的相对高程决定,图5列出了研究区内预测树高与实测树高之间的回归方程,从中可以看出,研究区的预测树高与实测树高表现出很强的线性关系,线性方程的斜率接近于1,R2为0.99。无人机倾斜影像数据在重建三维模型时,可能会造成树顶数据的缺失,以及受到点云密度的影响,预测树高值总体上偏低。

表3 树顶探测精度验证结果

图4 5m×5m窗口单木树顶点识别结果
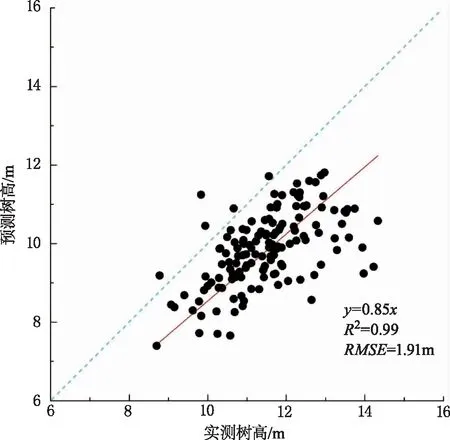
图5 单木树高提取结果精度评定
3.2 单木树冠分割结果
两种算法的树冠分割结果如图6所示。从图6中可以看出,分水岭算法在提取部分密集林木树冠时表现出一定优势,对于树冠边缘复杂、细节多的影像轮廓勾绘较敏感,而种子区域生长算法对林隙大的银杏冠层中勾绘更为精细。本研究对于树冠分割的精度验证方式是在相对误差阈值梯度下,分别统计了两种算法中树冠分割结果正检数量和正确率,并根据建立预测树冠面积与实测树冠面积参考值之间的回归关系计算出了相应的R2。两种算法对于相对误差阈值、正确率与R2的关系如图7所示。由图7可以看出,R2随着相对误差阈值的增大而减小,正确率则相反,这是因为相对误差阈值增加时,树冠投影面积预测误差较大的树被保留了下来,从而降低冠幅面积的提取精度,同时被判断为正确探测的树木数量也随之增加。

图6 单木树冠分割结果

图7 相对误差阈值对提取结果的影响
当相对误差阈值取30%时,种子区域增长算法提取的树冠正确率为73.14%,R2为0.98;标记控制分水岭算法提取的树冠正确率为63.43%,R2为0.97。两种算法中,预测树冠面积与实测树冠面积参考值建立的线性回归关系如图8所示。由图可知,种子区域增长算法和标记控制分水岭算法的树冠预测结果均与实测参考值显著相关,但种子区域算法的预测结果(RMSE=1.79m2)相对于标记控制分水岭算法预测结果(RMSE=2.44m2)误差更小。本研究的单木树冠提取结果,整体上较为准确,达到了半自动化、快速精准的树冠分割的目标,能够满足林业精准化、智能化的发展需求。


图8 树冠面积提取结果精度评定
4 结论与讨论
4.1 结论
本研究以银杏阔叶林为研究对象,基于无人机倾斜影像数据,运用三维重建技术提取了单木三维点云数据,通过不同探测窗口下的局部最大值法识别了单木顶点位置并提取了树高,同时运用种子区域增长算法和标记控制分水岭算法实现了银杏树冠的提取,并以地面实测数据作为“真值”对单木参数提取结果进行了精度验证。研究结果表明:采用5m×5m固定窗口进行单木识别的效果最好,银杏的树顶点识别的F得分达到了0.88,树高预测值总体偏低;在树冠预测结果相对误差为30%的情况下,种子区域增长算法的树冠提取精度高于标记控制分水岭算法,标记控制分水岭算法预测面积值相比之下较离散,说明在林分密度小的银杏阔叶林中,种子区域生长算法比分水岭算法能更好地处理树冠之间的林隙。本研究证实了运用无人机倾斜摄影数据可以对阔叶树进行单木识别与分割,达到了半自动化、快速精准的树冠分割的目标,可为无人机倾斜摄影技术在单木参数提取提供有效的理论与方法支撑。
4.2 讨论
本研究中,当移动窗口大小为3m×3m,5m×5m时,单木分割效果较好,7m×7m时漏检数目较多,因为研究区中的银杏阔叶林平均冠幅为5.8m,过大的窗口会使得多个树冠被误判为一个树冠,而造成顶点的漏检。同时,5m×5m窗口树顶点检测优于3m×3m窗口,因为银杏为阔叶树种,不同于针叶树种的顶端优势,观测位置不同时可能存在多个树冠顶点,3m×3m窗口下,漏检有所降低但误检树木明显增多。本研究中的样地为银杏阔叶林,其树冠结构相比于针叶树更为复杂,因此提取难度更大,这与Guerra-Hernández等[24]研究结果相似。因此,单木分割窗口选择应考虑树种与单木实际冠幅。此外,通过可变窗口大小[2]、改变CHM像素大小[25]、基于冠层形态的局部最大值识别[26]等方式,可在一定程度上提高单木识别的准确率,故单木识别算法需要不断地改进,以适应不同乔木类型的调查需求。
森林资源调查中很多重要的单木结构参数,例如,胸径、树高、冠幅、郁闭度等,都可以从CHM中直接或间接地获得。但从CHM获取的这些参数通常会比实际值低。在前人的研究中发现,由于LiDAR数据中树顶周围的点云错失或将点云数据转换为CHM过程中存在的一些无效值,树高通常会被低估1~3m[27-28],这与本文从无人机倾斜摄影测量技术获取的CHM中估测树高的结果相一致。同时,由于林木间的竞争关系,使得树冠相互遮挡与覆盖,冠幅往往也被低估[29-30]。本研究中的银杏阔叶林林分密度中等,林木之间的相互遮挡相对较少,因此,树冠的估测效果较好。
在以往大多数研究中,树冠分割算法都是基于树冠形状为锥形这一设定来研发的,适合运用于针叶树种。本研究针对银杏阔叶林,运用标记分水岭算法与种子区域增长算法提取树冠,取得了较好的预测效果。从总体来看,标记分水岭算法对与误差阈值的变化更为敏感,种子区域增长算法在相对误差阈值为50%正确率趋于稳定,且R2的损失较小,这是由于种子区域增长算法能将具有相同特征的联通区域分割出来,避免由于阔叶树树冠结构复杂对分水岭的干扰[31]。本研究中银杏阔叶林分密度为中等水平,受阴影干扰较小,种子区域增长算法表现更佳。当前,大多数的单木树冠提取研究集中在比较简单、规则或郁闭度不大的林分中,在未来的研究中,可进一步研究和探索复杂林分中林木参数提取的方法与精度,明晰林木快速自动检测与分割机制,满足未来更高效、更精确的森林资源调查需求。
猜你喜欢
安徽农业科学(2022年19期)2022-10-29
绿色科技(2022年11期)2022-07-02
绿色天府(2022年2期)2022-03-16
环球时报(2021-07-15)2021-07-15
长江丛刊(2020年13期)2020-11-19
幼儿智力世界(2020年7期)2020-10-29
东坡赤壁诗词(2017年3期)2017-07-05
百姓生活(2017年5期)2017-05-15
计算技术与自动化(2015年2期)2015-09-09
小小说月刊(2008年5期)2008-05-14
