基于固定翼载小型LiDAR与倾斜摄影数据融合的三维测图
2022-04-02 08:06雷志秋马强李杉格周俊彭世涛
测绘地理信息 2022年2期
雷志秋马 强李杉格周 俊彭世涛
1中电科特种飞机系统工程有限公司,四川 成都,610097
2中煤航测遥感集团有限公司,陕西 西安,710000
机载LiDAR技术是近几年三维重现技术领域的一项技术性突破[1-2]得到广泛应用。多旋翼无人机航时较短,不适合于规模较大的测区[3],如何使用固定翼搭载低成本小型激光雷达进行大测区高精细实景三维重现成为当下研究的热点。
使用固定翼搭载小于1.8 kg的小型激光雷达系统应用于地形三维重现的研究在国内还较少见,因为固定翼航速快,航高较高,往往会出现目标对象点云稀疏、模型不具备纹理、精度不高等方面的问题。无人机搭载多镜头倾斜摄影相机获取的地形实景三维模型纹理真实,且通过高精度外业采集的倾斜影像进行空三加密后生成的模型精度也较高,但是存在最终模型生产效率低的问题[4]。
本文基于固定翼机载小型LiDAR数据与倾斜摄影数据融合的三维测图,将倾斜摄影相机获取的影像仅进行空三加密后生成的点云和LiDAR数据融合,减少倾斜摄影生产最终模型过程,提高生产效率,融合数据后可解决固定翼机载16线小型LiDAR数据产生的点云稀疏、精度相对不高、三维重现效果不佳等问题。
1 顾及点云特征的多源数据融合原理
固定翼载16线小型激光雷达系统获取的点云个数相对稀少,与倾斜影像空三后生成的点云进行融合[5-8]。Besl等[9]提出了迭代最近点配准(iterative closest point,ICP)算法,被广泛应用于点云的配准当中[10,11],其算法步骤如下:
1)寻找点云在待配准点云的对应点对并计算两组点云的质心。
2)计算目标函数最小值。

式中,Rk为最优旋转矩阵;Tk为平移矩阵;f(Rk,Tk)为目标函数值。
3)用最优旋转矩阵Rk和平移矩阵Tk,使配准点云B坐标变换到Bk+1。

4)计算点对的平均距离。

本文使用ICP算法进行点云的配准,利用移动最小二乘算法进行改进可对点云缺失的部分进行重采样平滑处理,解决模型表面不光滑的问题[12]。
以四川省自贡市贡井区附近的平坦地形区域为研究区,验证固定翼载16线小型激光雷达系统是否满足三维场景重现的精度和三维效果。在精度方面,对测区范围内的土坑构建TIN(triangulated irregular network)模型后进行土方量测算,并与RTK(real time kinematic)实测值进行对比;在三维效果方面,对因点云噪声而产生的点云漏洞及TIN网格模型尖锐的问题进行解决并纹理贴图。其技术路线如图1所示。

图1 技术路线图Fig.1 Flow Chart of Technology
2 LiDAR数据获取最优航线实验
2.1 网络RTK实测数据获取
本文对测区范围内的坑体A使用网络RTK技术进行密集数据采集用于土方量的计算[13]。通过计算,坑体A面积约5 m2,首先使用西安煤航研发的LIDAR-DP软件对坑体A的RTK实测点数据构建TIN模型,测得其体积为3.300 m3。
利用RTK实测点数据对坑体A的边界范围进行矢量化处理,将矢量化边界套合在激光点云数据和融合点云数据中,得到精确范围内的点云。
2.2 固定翼载小型激光雷达系统数据获取
使用固定翼无人机对测区按井字形和蛇形航线飞行,得到两次激光雷达飞行数据,井字形航线会使单位面积点云个数增多。对两次飞行获取的激光点云数据进行预处理,如表1所示。
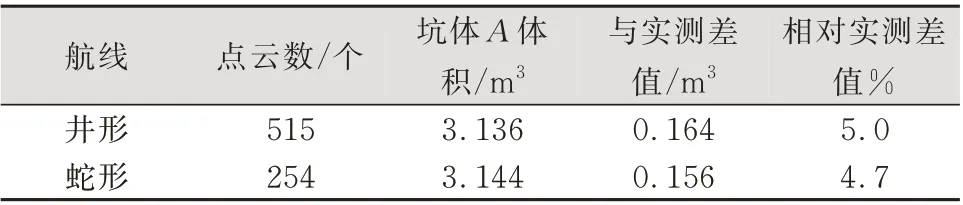
表1 井字形和蛇形航线数据处理分析Tab.1 Data Processing and Analysis of Tic Tac Toe Route and Snake Route
由表1可以看出,蛇形航线土方量计算精度与井字形航线相差不大,为了近一步研究两种航线对于点云数据质量的区别,对所获取的点云进行剖面提取后发现井字形航线中本该重合在一起的点云存在着明显的水平位移误差和高程位移误差,且点云厚度为0.2 m,超过《机载LiDAR数据获取技术规范》1∶1 000地形图点云数据高程中误差0.15 m的要求。这些误差主要来源于激光扫描仪与惯性导航系统之间的位移误差和IMU(inertial measurement unit)测量误差[14]。而蛇形航线针对同一目标对象的重合点云相对更少,导致的位移误差和厚度更小,点云厚度为0.10 m,满足1∶500和1∶1 000地形图点云数据高程中误差要求。蛇形航线飞行时间为井字形航线的一半,提高了作业效率。
综合分析,使用固定翼无人机载16线小型激光雷达系统时在保持航高80 m、航速21 m/s、航带间距50 m的同时,选取蛇形航线飞行最优。
2.3 旋翼无人机倾斜摄影数据获取
为了保证倾斜影像的精确度并匹配激光雷达点云的精度,倾斜影像地面分辨率设置为3 cm。在实验区布设像控点和检查点共10个,用于后期的空三加密。使用旋翼无人机搭载倾斜相机对测区进行低空低速数据获取。
3 基于LiDAR数据与倾斜摄影数据融合的三维测图
3.1 多源数据融合分析
针对低空、高重叠率得到的倾斜影像进行自动空三加密,将影像生成的点云与激光雷达点云进行点云匹配并融合。
首先对获取的倾斜影像空三加密得到生成的点云数据。然后,利用矢量化边界套合在倾斜影像生成的点云数据中,得到坑体A的倾斜影像点云,点云个数为266个。
在数据处理的时候,需要统一倾斜影像和激光雷达点云的坐标系,让影像能匹配上对应的激光雷达的点云,在赋色的同时,完成LiDAR点云与倾斜摄影生成点云中的同名点之间的粗匹配。但是即使倾斜影像生成的点云和激光雷达数据获取的点云在同一个坐标系下,仍存在部分点云不匹配的情况。
3.2 ICP算法改进的数据融合处理
ICP算法对多源数据的点云分辨率一致性是有要求的,本文在倾斜影像数据获取后,输出数据地面分辨率设置为0.03 m,得到高精度的倾斜空三加密点云,激光雷达点云和倾斜加密点云之间利用低分辨率匹配同名点对迅速完成粗配准,利用高分辨率匹配同名点对提高配准精度。
本文实验采用Visual Studio 2013,点云数据是三维数据,点云匹配选择7个参数,即3个平移参数(x,y,z)、3个旋转参数(α、β、γ)和缩放参数μ[15]。为了验证配准结果的绝对精度,实验中选取具有明显特征的点作为同名点和检验点,以倾斜影像生成的点云为模型,激光雷达点云为数据进行点云匹配。ICP算法得到的变换矩阵为R。
ICP算法配准结果绝对精度分析如表2所示,为了数据的保密性,将X、Y坐标只保留小数点前4位。

表2 配准结果绝对精度分析/mTab.2 Absolute Accuracy Analysis of Registration Results/m
由表2可得出各方向中误差:δx=0.01 m,δy=0.02 m,δz=-0.01 m。配准后的激光点云数据与倾斜影像生成的点云数据更为接近,配准精度较高。
本文将配准后的两部分点云导出txt格式,并存为一个点云数据,得到融合后的点云数据。对比原始激光点云数据、无ICP点云融合数据及有ICP点云融合数据3种方法计算的土方量值与网络RTK实测值3.300 m3的相对差值。结果如表3所示。
由表3可以看出,融合精确的倾斜影像生成的点云能在一定程度上提高固定翼载小型激光雷达系统进行土方量计算的精度,在进行ICP算法点云匹配后,多源数据融合后的点云相对实测差值仅为0.5%,在精度上有明显提高。

表3 多源数据融合及ICP算法对土方量计算的影响Tab.3 The Influence of Multi-Source Data Fusion and ICP Algorithm on Earthwork Calculation
3.3 多平台实景三维地形重现
由于坑体点云分布不均匀且点云间具有位移误差,本文对其进行剖面分析,由图2可知,坑体点云冗余且噪声较多。
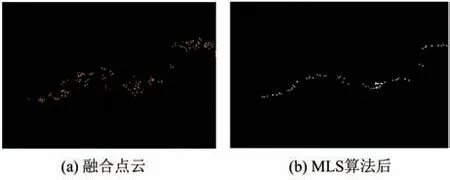
图2 融合点云坑体剖面图Fig.2 Sectional View of the Pit Body After Point Cloud Fusion
根据点云的特点,联合多平台对其进行实景三维重现,首先在Visual Studio 2013平台上对融合后的点云使用移动最小二乘(moving least square,MLS)算法进行重叠点数据漂移,将点云数据重叠区域单层化,使点云更为平滑。
然后将点云导入LiDAR-DP软件中与倾斜影像进行纹理的贴合,实现固定翼载16线小型激光雷达系统精细化三维地形重现,如图3所示。

图3 测区三维实景重现Fig.3 3D Real-life Reproduction of the Survey Area
4 结束语
本文针对地形测绘、小型堆积体使用固定翼搭载16线小型激光雷达建立高精细实景三维模型,验证了其在土方量计算、地形三维重现的可行性,并通过实验得到了该条件下激光雷达数据获取的最优方案,结合激光雷达点云和倾斜影像进行多源数据融合,使用ICP算法和MLS算法对数据处理进行改进。实验结果表明:①固定翼搭载16线激光雷达使用蛇形航线获取的点云厚度约0.1 m,优于井字型航线0.2 m的点云厚度;②激光雷达点云融合精确的倾斜影像生成的点云能一定程度上提高固定翼载16线小型激光雷达系统进行土方量计算的精度;③在进行ICP算法改进后,多源数据融合后的点云相对实测差值仅为0.5%,在精度上有明显提高。④使用MLS算法对融合点云进行点云平滑后可解决点云冗余且噪声较多的问题。
猜你喜欢
建材发展导向(2022年10期)2022-07-28
农业工程学报(2022年4期)2022-04-24
建材发展导向(2022年4期)2022-03-16
汽车观察(2021年8期)2021-09-01
科技研究·理论版(2021年20期)2021-04-20
计算机与网络(2020年19期)2020-12-04
青少年科技博览(中学版)(2020年12期)2020-03-29
航空模型(2016年10期)2017-05-09
航空模型(2016年10期)2017-05-09
环球人文地理·评论版(2016年10期)2017-03-20