智能全向移动平台的里程计系统误差校正
2022-04-02 06:00朱文亮司文展朱加豪周云鹏
科学技术创新 2022年7期
朱文亮 司文展* 朱加豪 周云鹏
(1、江苏海洋大学机械工程学院,江苏 连云港 222005 2、盐城工学院机械工程学院优集学院,江苏 盐城 224007)
近年来,智能移动机器人是广大科研工作者的研究热点,在移动机器人相关技术研究中,自主导航技术是其研究的核心,而定位是完成导航的前提和基础[2]。
定位是指通过传感器确定移动机器人在其运动环境中的坐标,根据定位过程分为绝对定位和相对定位[3]。其中轮式里程计定位是一种最广泛使用的相对定位方法。里程计使用编码器为移动机器人提供基本的位姿估计,这种方法称为航迹推算法,能够在短期内提供较高的定位精度,航迹推算是一个累加的过程,随着运行距离的增加,会产生误差累计,所以减少里程计误差具有重要的意义[4]。
里程计系统误差主要是由于移动机器人设计不合理以及制造精度较低等因素引起,所以通过校核系统参数(轮径和轮距)可以减少系统误差[5]。在麦克纳姆轮式移动平台里程计定位过程中,系统误差主要来源于包括车轮实际直径与测量直径不相等、有效轮距安装误差等。
1 智能全向移动平台的运动学分析
传统的移动平台转弯时需要适宜的转弯半径,在狭小空间转弯时,有时需要不停地进行停车再调整,降低了物流效率。为了适应狭窄的工作环境和降低仓储空间成本,本文设计了一款麦克纳姆轮式的全向移动平台。为方便分析智能全向移动平台的运动学特征,假设运动环境是平面,忽略运动地面不平整对运动的影响,忽略车轮和地面的打滑。
建立运动学物理模型:
如图1(b)所示,移动平台辊子如图示安装,刚体在平面内的运动可以分解为三个独立分量:X 轴平动,Y 轴平动,yaw 轴自转,如上图所示,移动平台底盘的运动也可以分解为三个量:Vx为X 轴运动的速度,即上下方向,定义向上为正;Vy为Y 轴运动的速度,即左右方向,定义向左为正;ω 表示yaw 轴自转的角速度,定义逆时针为正,以上三个量为移动平台几何中心O 的速度。
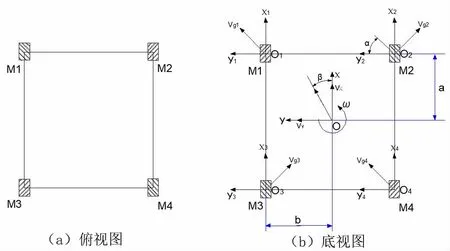
图1 移动平台物理模型
M1M2M3M4 为轮1 轮2 轮3 轮4;Oixiyi为与各轮中心固连的坐标系;vi为各轮中心速度;ωi为各轮转速;vgi为各辊子中心速度;Rn为标称轮直径;α 为辊子方向与轮毂的夹角[6]。逆运动学问题就是将底盘坐标系Oxy 下的线速度和角速度转换为4 个驱动麦克拉姆轮的速度。

麦克纳姆轮的轮毂轴与辊子转轴呈45°。理论上这个夹角可以是任意值,根据不同的夹角可以制作出不同的轮子,但从结构、力学特性、运动学特性来讲45°是最优异的[7]。将α=45°代入

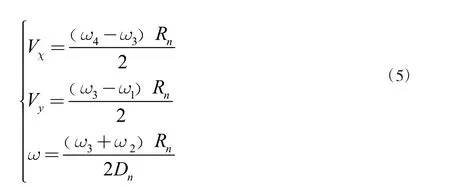
正运动学问题就是将4 个驱动麦克拉姆轮的速度转换为底盘坐标系Oxy 下的线速度和角速度。正运动学模型可以根据逆运动学模型解出来。
2 基于行程法的校正方法
本文提出了校正里程计系统误差的方法-行程法,并设计校正实验确定校正参数。该校正方法分别考虑了系统误差对机器人直线运动和旋转运动的影响,通过直线运动和旋转运动的实验数据确定校正参数[1]。
本次实验利用课题组自主研发的麦克纳姆轮式智能移动平台,该移动平台的四个轮子通过四个伺服电机完全独立驱动(图2)。

图2 麦克纳姆轮式智能移动平台
智能移动平台里程计的原理就是ROS 平台发布线速度和角速度指令,通过逆向运动学方程解析为每个轮子的转速指令,移动平台运动时,采集四个轮子的编码器反馈数据,结合正向运动学方程,计算出移动平台的瞬时位姿。
当移动平台的瞬时位姿达到目标位姿时停止,此时停下的位姿与目标位姿产生的误差,需要校正,如图3 为里程计系统工作过程流程图。

图3 里程计系统工作过程流程图
由轮直径测量误差导致的误差ER对移动平台位置定位产生影响, 轮距的安装误差导致的误差ED对移动平台位姿定位产生影响,其中

式中,Ra为实际轮直径,Rn为标称轮直径,Da为实际轮距,Dn为标称轮距[8]。把误差系数代入运动学模型中,其中,逆运动学模型

正运动学模型

以轮1 为例,将引用误差系数后的Vx、Vy、ω 转化为伺服电机的转速,即

将引入校正系数后的运动学模型在程序中实现,设计简易校正软件方便测试系数真值,如图4 是利用ROS 机器人操作系统设计的界面。
如图4 所示,test_distance 表示测试距离,即给定的移动平台运动距离;test_angle 表示测试角度,即给定的移动平台自转角度;speed 表示测试速度;odom_linear_correction 表示直线校正系数;odom_angular_correction 表示自转校正系数。

图4 操作界面
为了保证数据可靠性,直线运动速度分别取1m/s、1.5m/s、2m/s ,运行距离为3 米;旋转运动速度分别取5°/s、10°/s、15°/s, 自转角度为360°。得到的测试数据如图5所示,测试时,每种情况测试5 次(直线运动测试校正前,速度为1m/s 为一种情况,以此类推),图中只记录每种情况的最大值、最小值和中位数。

图5 测试数据
3 试验结果与分析
表1 所示为校正前后移动平台的位置定位误差结果,表2 所示为校正前后移动平台的姿态定位误差结果。从图1 可以看出,校核前位置定位测试的均值为3.154m,校核后的均值为3.006m,位置定位精度提高了4.9%,从图2 可以看出,校正前姿态定位测试的均值为370.11°,校正后的均值为360.5°,姿态定位精度提高了2.7%。

表1 直线运动校正前后实验数据对比

表2 旋转运动校正前后实验数据对比
4 结论
里程计的误差校正是实现智能全向移动平台位姿准确估计的前提。所以本文综合考虑麦克纳姆轮式移动平台系统误差来源产生的误差对定位造成的影响,提出了针对轮直径测量误差和轮距安装误差而引起的里程计系统误差校正方法。
4.1 实验结果表明,校正后的系统误差有明显改善。
4.2 用数学思维提出了一种逻辑严密的里程计系统误差校正方法,使误差校正更易操作。
4.3 由于可以根据具体底盘的精度和实验场地选择实验运动的路程和重复次数,故该方法的实验简单方便。
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
内燃机与配件(2022年2期)2022-01-17
中国科技纵横(2020年13期)2020-12-11
现代信息科技(2020年22期)2020-06-24
冰雪运动(2020年5期)2020-03-29
山东工业技术(2019年16期)2019-07-19
黑龙江教育·中学(2018年1期)2018-04-02
中学生理科应试(2017年2期)2017-04-01
新高考·高一物理(2016年1期)2016-03-05