基于NSGA-Ⅱ和BP 算法的横置板簧悬架系统多目标优化
2022-04-02 12:35张慧慧赵晓敏
阜阳师范大学学报(自然科学版) 2022年1期
张慧慧,李 鑫,张 良*,赵晓敏,孙 克
(1.合肥经济学院,安徽 合肥 230601;2.合肥工业大学汽车与交通工程学院,安徽 合肥 230009)
得益于汽车制造和技术的飞速发展,乘客对汽车驾驶舒适性和汽车运行稳定性提出了更高的要求,这促进了各种电子控制技术在汽车领域的应用和发展。由于道路条件和车辆行驶过程的复杂性,如何获得车辆的最佳性能一直是汽车底盘设计中的一个难题。而悬架是汽车底盘中很重要的一部分,车辆的平顺性和操稳性受汽车悬架参数变化的直接影响,在平顺性提升的时候,一定程度上使操稳性有降低趋势,反之亦然。汽车行驶平顺性和操稳性是非常重要的两项性能,悬架系统对这2 个性能有着决定性的影响。横置板簧悬架[1]近年已出现成功应用案例,国外的企业看准了横置板簧的优势,很早就投入了市场。横置板簧通过调节力臂长度,刚度可实现在3~6 倍范围内变化[2-5]。
目前,汽车悬架系统优化中的复杂仿真模型一般采用ADAMS 等软件建立复杂的仿真模型[6-7],这种方法容易造成较大的累积误差,造成结果偏差比较大;另外,有的把稳定性或驾驶舒适性作为优化的目标函数指标之一[8-9],把其他性能指标作为获得最优结果的条件,一般来说,最优解往往是某个指标:驾驶舒适性或操纵稳定性,偏重和大小无法确定。基于此,本文建立了车辆操稳性与行驶平顺性数学模型,将两个性能评价指标同时作为目标进行优化,提出了1 种多目标优化设计方法,该方法在不同性能偏好下,能得到不同的参数优化结果。开发人员根据优化结果,根据弹簧载荷质量的变化,去自由的根据自己喜好的去选择相应的刚度和阻尼数值。
1 建立整车悬架系统振动模型
要对汽车悬架系统进行操稳性和平顺性的分析和优化,需要分别对汽车的平顺性和操稳性的进行建模,从单一的自由度到空间多维自由度,从单一平面模型到一个空间模型,然后分别对两个模型进行频域相关特性的求解。在工程问题上,建立车辆振动系统的多自由度数学模型是十分必要的。在一般工程问题中,有必要根据实际情况采用多自由度模型对车辆悬架系统进行分析。本节主要介绍了一种常见的汽车整车七自由度振动模型,并分别列出平顺性和操稳性的求解过程。建立整车悬架系统振动模型,如图1 所示。

图1 悬架动力学模型
图1 中:m1、m2分别为前、后车轮质量,m5为车身质量;c5、c6分别为前、后悬架减振器阻尼;k1、k2分别为前、后轮胎的垂直刚度,k5、k6分别为前、后悬架弹簧的刚度;Ix、Iy分别为车身绕横轴和纵轴的转动惯量;q1、q2、q3、q4分别为路面对左前轮、左后轮、右前轮、右后轮的激励;z1、z2、z3、z4为左前、左后、右前和右后车轮的位移,z5为车身垂直方向的相对位移,θ为车身俯仰角位移,φ为车身侧倾角位移;d为左右车轮之间的轮距。
根据整车振动模型,运用牛顿定律得到整车振动模型的运动微分方法[10]如下:

其中:M 为质量矩阵,C 为阻尼矩阵,K 为刚度矩阵,Kt为轮胎刚度矩阵,激励向量Q=[q1q2q3q4]T,Z、、分别为位移、速度、加速度向量。
1.1 操稳性方程的求解
与操纵稳定性有关的运动微分方程为:

其中:v是车辆质量中心的速度,r为横摆角速度;β为车辆质量中心上的侧倾角,θ为方向盘转角,α 为转向柱与z 轴夹角,δ 为前轮转角;h为车辆悬架的横摇臂,即悬架上质心与侧倾中心高度差,a、b 分别为汽车前、后轴到车身质心的水平距离,Dw为轮胎回臂;Kφf、Kφr分别为前、后悬架总的侧倾角刚度,Kw为转向系对车身的刚度;Cφf、Cφr分别为前、后悬架的阻尼;m 为整车的质量;Iz为整车横摆惯量,Iw为前轮绕主销转动惯量;Fyf为前桥转弯力,Fyr为后轴转弯力,T 为方向盘扭矩输入;i为转向系统传动比,Cw为转向阻力系数。
操稳性数学模型无法直接求出,因此用龙格库塔法求解操纵稳定性运动微分方程。
1.2 平顺性方程的求解
对悬架平顺性进行分析[11]时,根据路面不平度的输入功率谱,和由车辆悬架系统参数得到的频率响应函数,对振动微分方程(1)两边同时进行傅里叶变换,得频率响应函数H(ω):

其中:ω为车身振动圆频率,矩阵H(ω)中第i行第j 列元素Hij表示第j 个车轮处路面输入到车辆系统第i 个自由度的频率响应函数。
振动模型中第i 个自由度响应点的位移响应自功率谱密度Gzi(ω)和加速度功率谱密Gzi(ω)为:

其中:Hi(ω)为频率响应矩阵H(ω)第i 行,“*”表示共轭矩阵,Gq(ω)为四轮输入情况下路面不平度功率谱矩阵。
第i个自由度响应点的加速度均方根值为:

其中:ω2、ω1分别为频率的上、下限。
2 建立多目标优化模型
2.1 确定目标函数
为改善车辆行驶平顺性,选取σz最小作为第1 个优化目标;为改善汽车操纵稳定性,取max φ最小作为第2 个优化目标,建立如下目标函数[12]:

其中:X为优化设计向量,f1(X)、f2(X)分别为建立的2 个目标函数,σz为车身加速度均方根值,max φ 为汽车转向行驶时车身侧倾角的最大值。
所述优化设计变量X为:

2.2 确定约束条件
将本文提出的非支配排序遗传算法(nondominated sorting genetic algorithm -II,NSGA-Ⅱ)和反向传播(back propagation,BP)神经网络算法的多目标优化方法应用于整车悬架模型上。根据相关标准及设计准则,选择各约束合适的上、下界以保证车辆性能。综上所述,在v=50~60 km/h的车速范围,建立优化模型如下:

其中,F(x)为目标函数向量,β为质心侧偏角,r/δ为瞬态不足转向增益,T/ay为规定力输入下侧向加速度方向盘力矩梯度。接着的2 个不等式为阻尼约束。
2.3 确定车辆参数和变量初始值
整车主要参数选取见表1 所列,优化设计变量初始值及上下限见表2 所列。

表2 变量初始值及上下限
3 多目标优化模型的求解
将BP 算法用于具有非线性转移函数的多层前馈网络,理论上可以逼近任何非线性映射关系,这一优势使得多层前馈网络得到越来越广泛的应用[13-15]。NSGA-II 是模拟自然界遗传机制和生物进化论而成的一种并行随机搜索最优化方法。NSGA-II 算法使用了快速非支配排序法、用拥挤度的方法代替了需指定共享半径的适应度共享策略等先进策略[16-18],是一种得到广泛认可的多目标优化算法。
根据建立的多目标优化模型可以写出2 个程序,2 个程序的输入均为优化设计变量X,输出分别为σz、max φ。由于2 个程序中包含大量数学运算,运行耗时比较大,因此利用2 个程序各自产生一部分输入输出数据集,然后用BP 网络训练,网络训练好后用BP 网络进行预测。最后结果显示:在Windows 10 系统、处理器为Intel(R) Core(TM)i7-8550U CPU@1.80GHz 2.00 GHz 的情况下,仅使用NSGA-II 算法总程序运行时间为3.363 h,而使用BP 神经网络结合NSGA-II 算法的总程序运行时间为1.477 h,总程序运行时间缩短56.08%,算法总的运行速度得到很大提高。
构建2 个BP 网络,两个网络的结构都是4-9-1,即输入层有4 个节点,隐含层有9 个节点,输出层有1 个节点。网络的输入参数均为k5、k6、c5、c6,网络的输出分别为σz.5.、max φ。2 个网络各自随机采集4×106组样本数,用来训练网络,其中一部分样本数用来验证网络。最后验证结果如图2 所示。
由图2 可知:网络预测值与实际值相比,误差小于10-3,即网络预测值可精确到小数点后3 位,符合要求,网络具有很好的预测能力,完全能够作为NSGA-II 的目标函数。NSGA-II 算法原理流程图如图3 所示。


图2 BP 神经网络预测值误差

图3 NSGA-II 算法流程图
4 多目标优化结果
设定交叉概率为0.9,种群规模为100,进化代数为500,得出目标函数值的Pareto 最优解分布如图4 所示。

图4 目标函数最优解集
其中:f1(X)最小为0.383 m/s2,此时f2(X)取最大值,最大值为3.522°;f2(X)最小为2.239°,此时f1(X)取最大值,最大值为0.576 m/s2。
在最优解集的分布范围内,开发者可以根据自己的不同需求和偏好选择最优解。为了确保选择不受其中一个目标的支配,在选择之前对2 个目标值进行归一化。可以根据不同的偏好选择最优折中方案,见表3 所列。簧载质量增大即多乘客乘车时,可有意选择偏重操纵稳定性悬架参数;簧载质量比较小的时候,可为了乘坐舒适性去有意选择平顺性悬架参数。

表3 最优妥协解(7 名乘客(1 905 kg)时)
选取中位数偏好为(0.35,0.65)的解为最优妥协解,对比优化前后性能指标,对比结果见表4 所列。由表4 可知,优化后侧倾角有所减小,σz有一定程度增大,优化后的方案比原方案在侧倾角降低14.56%,加速度均方根值增大4.3%,牺牲小部分平顺性,增大了操稳性指标,平顺性和操稳性的多目标优化效果明显。
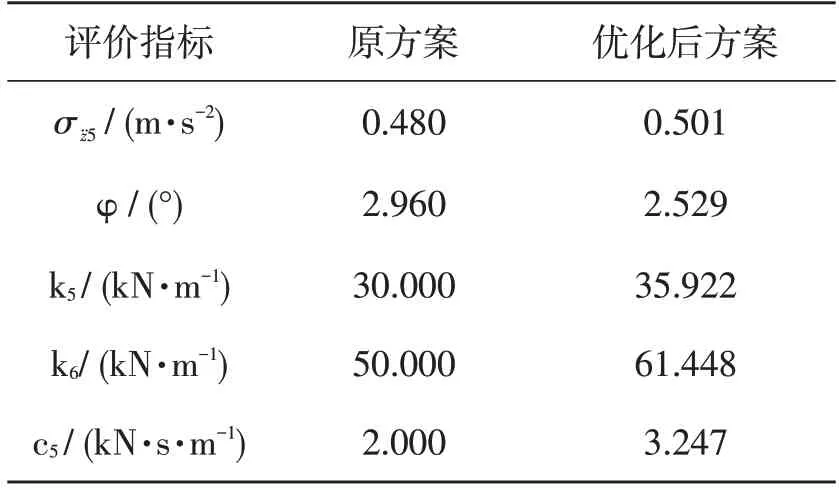
表4 优化前后方案对比(7 名乘客时)

当乘客人数为1~3 名时,应当偏重平顺性,偏好可分别为(0.7,0.3),(0.65,0.35),(0.6,0.4);当乘客人数为5~7 名时,应当偏重操稳性,偏好可分别为(0.45,0.55),(0.4,0.6),(0.35,0.65)。簧载质量的所有情况最优解见表5 所列,从表中可知,当选择不同工况时,侧倾角和加速度均方根值的综合性能均有不同程度的改善。
5 敏感度分析
5.1 分析方法
参考文献[19]中改进的Sobol 法,其主要思想是优化计算过程使得关键结果一阶敏感性指标和总体敏感性指标的计算次数大幅缩减为n(k+2)次,其中n为抽样次数,k为考虑的参数数量。假定输出模型y=f(x1,x2,…,xk),则模型的总方差为:

式中:V(y)为输出的总方差;Vi为参数xi时的方差,即为V(E(Y|xi));Vij为V(E(Y|xi,xj))-Vi-Vj,模型中参数的敏感性指标可表示为:

式中,Si为一阶敏感性指标,STi为总体敏感性指标,。
5.2 分析结果
设置采样的样本数为3 000,自变量数目为4。使用蒙特卡洛抽样,然后以M1矩阵第j 列置换M2矩阵中第j 列,得到矩阵N1;将矩阵M1、M2、Ni利用公式(12)和(13)计算出各参数的一阶灵敏度指标和总体灵敏度指标,并对相应参数的灵敏度进行评价,结果见表6 所列。

表6 分析参数的敏感度值
由表可知,在平顺性分析中,c5变量敏感度权重最大,在一阶敏感度和全局敏感度中分别权重占比为33.81%、39.19%,其他3 个变量也相对占据比较大的权重值,不可忽视。所以在注重平顺性的分析时(簧载质量小于等于1 605 kg),应精细化对c5(前减震器阻尼)的控制。
在操稳性分析中,k6变量敏感度权重最大,在一阶敏感度和全局敏感度中分别权重占比为58.43%、51.65%。所以在注重操稳性的分析中(簧载质量大于1 605 kg),应精细化对k6(后悬架刚度)的控制,因在全局敏感度中c6对操稳性影响很小,权重占比仅为5.42%,从节能和稳定的角度来看,可放弃对后减震器阻尼的控制,使其变为常数[20]。
6 小结
本文综合考虑汽车平顺性与操稳性并以此作为优化目标,结合NSGA-II 和BP 算法进行优化建立整车悬架系统振动模型。仿真结果表明,优化后的横置板簧悬架系统在不同工况下侧倾角和加速度均方根值均有不同程度的改善,其中以7名乘客时改善效果最为明显。通过Sobol 敏感度分析法可知,在对刚度和阻尼4 个变量进行控制时需要精准控制前阻尼值和后刚度值。此外后阻尼值对操稳性影响较小,当簧载质量较大时,从节能和稳定角度来看,可以让后阻尼成为常数。
猜你喜欢
青少年科技博览(中学版)(2022年11期)2023-01-07
舰船科学技术(2022年10期)2022-06-17
装备制造技术(2020年2期)2020-12-14
今日农业(2019年12期)2019-08-15
北京汽车(2016年6期)2016-10-13
现代制造技术与装备(2015年4期)2015-12-23
天津职业院校联合学报(2014年2期)2014-09-20
汽车维护与修理(2014年10期)2014-02-28
船海工程(2013年6期)2013-03-11
汽车与新动力(2012年5期)2012-03-25